

13 Лекция 6 14.03.2007
Переход от ду высшего порядка к сду первого порядка.
ОДУ n – го порядка называется уравнение с неизвестной функцией , в которое входят производные этой функции вплоть до y(n)(x).
В общем виде ОДУ n – го порядка содержит независимую переменную, неизвестную функцию и ее производные (или дифференциалы) до n – го порядка включительно и имеет вид F(x,y,y’,y”,…,y(n))= 0 , где x – независимая переменная, y,y’,y”,…,y(n) – неизвестная функция и ее производные.
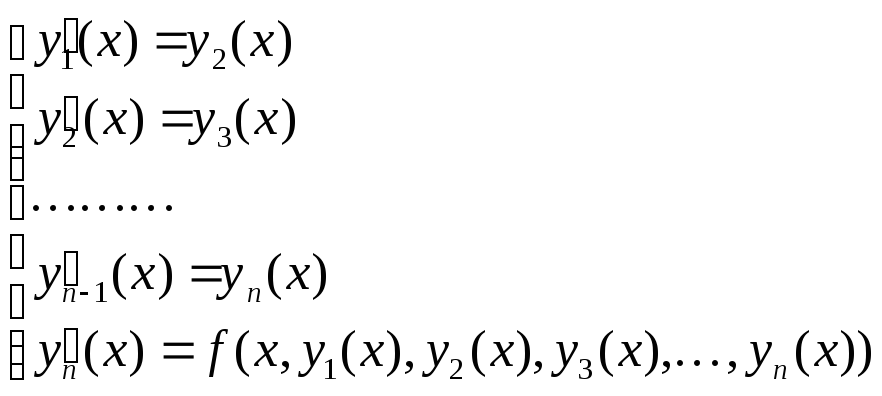
ОДУ n – го порядка, разрешенное относительно старшей производной, может быть записано в виде
![]()
Для корректной постановки задачи Коши требуется задать n начальных условий на саму функцию y(x) и ее производные от первого до (n-1) порядка включительно , т.е в виде

Положим
![]() .
.
Очевидно , что
![]() .
.
Тогда ДУ порядка n с начальными условиями может быть записано в виде
![]()
С начальными условиями в новых обозначениях
 (12.4)
(12.4)
Мы получили систему ОДУ первого порядка для n функций с n начальными условиями.
Пример 1 :
Рассмотрим численное решение дифференциального уравнения свободных колебаний маятника в сопротивляющейся среде. Еще это уравнение называют уравнением гармонического осциллятора .
![]()
Здесь y(t) изменение угла его отклонения от вертикали ,
y(t) – угловая скорость маятника ,
y(t) ускорение ,
y(0)=0.1 начальное отклонение ,
y(0)=0 начальная скорость .
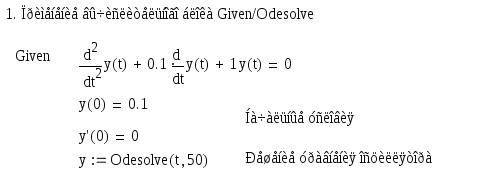
График решения

Как можно заметить, результатом применения блока Given/Odesolve является функция y(t), определенная на промежутке (to, ti)
Допустимо, и даже часто предпочтительнее, задание функции Odesolve (t, tl, step) с тремя параметрами, где step- внутренний параметр численного метода, определяющий количество шагов, в которых метод Рунге-Кутты, будет рассчитывать решение дифференциального уравнения.
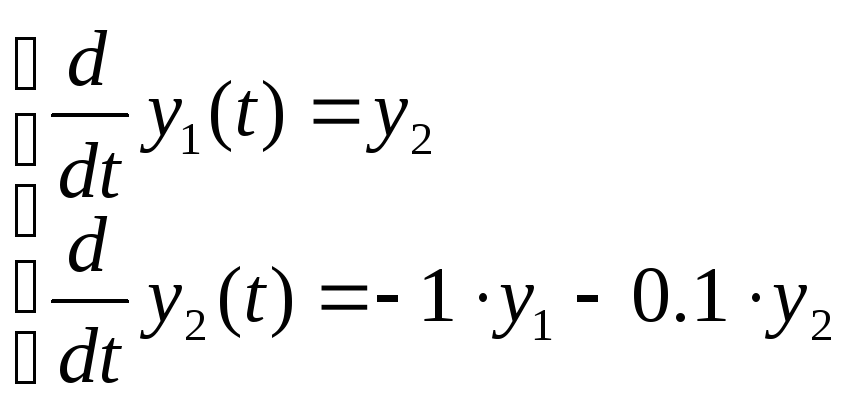
2. Второй способ решения ОДУ высшего порядка связан со сведением его к эквивалентной системе ОДУ первого порядка.
Любое ОДУ n-го порядка, линейное относительно высшей производной, можно свести к эквивалентной системе n дифференциальных уравнений.
Действительно, если формально обозначить y(t) = y1(t), a y'(t)=y2(t)=y1'(t), то исходное уравнение запишется через функции у1(t) и y2(t) в виде системы двух ОДУ
 При
начальных условиях
При
начальных условиях

В случае решения системы методом Рунге-Кутты для первого шага можно записать:
i=0 , t0=0
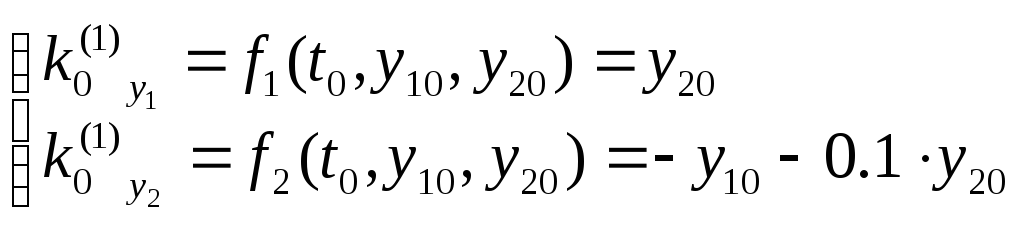
Для
![]() :
:
Значения соответствующих коэффициентов будут

Для
![]() :
:

Это решение только для первого шага вычислений по методу Рунге-Кутты.
Использование вычислительной системы mathcad
По умолчанию нумерация строк и столбцов начинается с нуля , поэтому чтобы иметь лишние затруднения , можно просто принять , что y1=y0 , а соответственно y2=y1 . Это позволит не производить перенумерование элементов матриц условий и решений.
Обратите внимание на необходимость векторной записи как самого уравнения, так и начального условия .

Самая важная - это первая строка, в которой определяется система ОДУ.
-
Функция D должна быть функцией обязательно двух аргументов.
-
Второй ее аргумент должен быть вектором того же размера, что и сама функция D.
-
Точно такой же размер должен быть и у вектора начальных значений уо (он определен во второй строке листинга).
Альтернативный метод решения ОДУ заключается в использовании одной из встроенных функций rkfixed, Rkadapt или Bulstoer.
Встроенные функции, которые позволяют решать поставленную в форме СДУ задачу Коши различными численными методами:
- rkfixed(y0,t0,ti,M,D) - метод Рунге-Кутты с фиксированным шагом;
- Rkadapt(y0,t0,ti,M,D) - метод Рунге-Кутты с переменным шагом (Там, где решение меняется слабо, шаги выбираются более редкими, а в областях его сильных изменений – частыми);
- Bulstoer (y0,t0,ti,M,D) - метод Булирша-Штера ( метод рациональной экстраполяции – сначала находится первоначальное приближение в точках по какому-то из известных одношаговых методов , а затем считают улучшенное с помощью экстраполяции рациональными функциями ) Обычно используется для сложных систем из большого кол-ва ДУ.
-
y0 - вектор начальных значений в точке to размера nx1;
-
to - начальная точка расчета;
-
ti - конечная точка расчета;
-
м - число шагов, на которых численный метод находит решение;
-
D - векторная функция размера nx1 двух аргументов - скалярного t и векторного у.
При этом у - искомая векторная функция аргумента t того же размера nx1. В подавляющем большинстве случаев достаточно использовать первую функцию rkfixed.
Размер полученной матрицы будет равен (m+1)х(n+1), т. е. 51х3 .