

-
План аналогов ускорения для крайнего положения
На рис. 2.15 представлен план аналогов ускорения для крайнего положения:
Масштаб: Kw=0.001

Рис. 2.15
-
Результаты в стандартной программе
При помощи стандартной программы были получены координаты, аналоги скоростей и ускорений точек и звеньев данного рычажного механизма. А также углы, под которыми расположены данные звенья.
В прилож. 3 представлены результаты из стандартной программы.
-
Сравнение результатов и выводы
На рис. 2.16 представлена таблица с результатами, полученными тремя способами:

Рис. 2.16
При помощи 3 разных способов мы получили достаточно близкие друг к другу результаты, чтобы совершенно точно утверждать, что все необходимые данные для вычислений найдены верно. Разница между вычислениями составляет 0.01-0.001, что является лишь недостатком округления.
-
Силовой анализ механизма
-
Постановка задачи
Главной задачей силового расчета является определение реакций в кинематических парах и движущего момента, прикладываемого к начальному звену. Все это необходимо для расчетов различных критериев прочности механизма.
-
Исходные данные
На рис. 2.17 представлены исходные данные для силового расчета:

Рис. 2.17
-
Расчет масс звеньев, сил тяжести и координат центров масс
На рис. 2.18 представлен расчет масс звеньев (кг):

Рис. 2.18
На рис. 2.19 представлен расчет сил тяжести звеньев (Н):

Рис. 2.19
На рис. 2.20 представлен расчет координат центров масс (м):

Рис. 2.20
На рис. 2.21 представлен расчет аналогов скоростей и ускорений центров масс (м/c), (м/c^2):

Рис.2.21
-
Расчет моментов инерции
На рис. 2.22 представлен расчет моментов
инерции ( ):
):

Рис. 2.22
-
Расчет сил инерции
На рис. 2.23 представлен расчет сил инерции (Н):
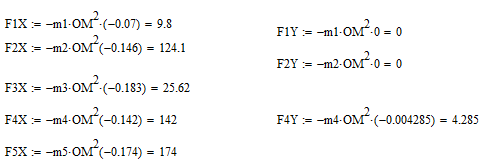
Рис. 2.23
-
Расчет моментов сил инерции
На рис. 2.24 представлен расчет моментов
сил инерции ( ):
):

Рис. 2.24
На рис. 2.25 представлена схема механизма, с учетом нанесения координат центров масс, сил тяжести, сил инерции и локальных систем координат:

Рис. 2.25
-
Расчет данных для поршня
На рис. 2.26 представлен расчет данных для поршня:

Рис. 2.26
-
Составление уравнений кинетостатики
Для каждой структурной группы механизма, начиная с последней, записываем уравнения кинетостатики, приложив необходимые реакции.
На рис. 2.27 представлены 4 и 5 звенья, с нанесенными реакциями:

Рис. 2.27
Определение реакций в кинематических парах для 4 и 5 звеньев:
4 звено:

5 звено:

На рис. 2.28 представлены 2 и 3 звенья, с нанесенными реакциями:

Рис. 2.28
Определение реакций в кинематических парах для 2 и 3 звеньев:
2 звено:

3 звено:

На рис. 2.29 представлено 1 звено, с нанесенными реакциями:

Рис. 2.29
Определение реакций в кинематических парах для 1 звена:

-
График движущего момента
на рис. 2.30 представлен график движущего момента

Рис. 2.30
-
Схема 6
-
Исходные данные
Длина и координаты звеньев (м):


Схема, построенная по исходным данным при q=0, представлена на рис. 4.1:

Рис. 4.1
Ввод исходных данных в стандартной программе, представлен в прилож. 3.
-
Структурный анализ
Структурным анализом называется разделение всего механизма на структурные группы, в целях упрощения исследования данного механизма.
Граф механизма, представлен на рис. 4.2:

Рис. 4.2
Число подвижных звеньев механизма N=5.
Число низших кинематических пар pн = 7;
Число высших кинематических пар pв = 0;
Степень подвижности механизма:

Механизм нормальный.
-
Геометрический анализ
На рис. 4.3 представлен план 12 положений механизма в масштабе:

Рис. 4.3
План составлен в соответствии с рис.
2.1. Каждое из 12 положений отлично от
предыдущего на
 относительно звена ОА.
относительно звена ОА.
-
Составление уравнений геометрического анализа
1)
 , где
, где

2) ,
где
,
где

3 ,
где
,
где

4) , где
, где

-
Особое положение ВПВ
На рис. 4.4 представлено особое положение
группы ВПВ, при
 :
:

Рис. 4.4
-
Особое положение группы ВВП
На рис. 4.5 представлено особое положение группы ВВП:

Рис. 4.5
-
Сборка
На рис. 4.6 представлено два вида сборки М2: М2=1, М2=-1:

Рис. 4.6
-
Решение уравнений геометрического анализа
1) Первую систему решаем подстановкой входной координаты (q).
2) Вторая система:
Переносим известные слагаемые в левую часть, неизвестные - в правую. Складываем первое уравнение со вторым и возводим в квадрат. Затем выражаем АС и находим 60 значений длины звена:

Выражаем косинус и синус по формулам, подставляем найденное АС и находим 60 значений синуса и косинуса, в зависимость от входной координаты (q):

3) Третья система:
Подставляем ранее найденные углы F3, подставляем входную координату (q) и получаем 60 значений координаты точки D:


4) Четвертая система:
Подставляем входную координаты (q) во второе уравнение. Находим синус угла F4:
![]()
Затем находим косинус угла F4 из первого уравнения:
![]()
Подставляем найденные значения в систему и получаем координаты точки E, в зависимости от входной координаты (q), 60 значений:
![]()