

Экзамен / TMM_otvety_2
.pdfВопрос 15. Силовой расчет механизмов с учетом трения в КП методом последовательных приближений.
Пример: кривошипно-ползунный механизм.В первом приближении связи считают идеальными, силами трения пренебрегают. По найденным реакциям находят силы трения и повторяют силовой расчет, считая силы трения известными. Вычисляют следующие приближения до тех пор, пока разница между значениями сил реакций, найденных в последующем и предыдущем приближениях, не окажется меньше допустимого значения.
Пример. Будем считать массу шатуна 2 пренебрежимо малой. При сделанном допущении ползун 3 становится статически определимым.
R12 |
|
a) |
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
|||
|
A |
R03 |
R23 |
R03 |
|
|
|||||
|
2 |
B |
3Р Ф3 |
3 |
|||||||
|
|
α |
α |
|
B |
|
Р Ф3 |
||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M 03( R ) |
|
|
|
|
|
|
|
|
|
|
|
|
( R ) |
G3 |
|||||
|
|
|
G3 |
M03 |
|||||||
Рис. 5.8
|
|
|
|
|
в) |
|
|
R23 |
R03 |
3 |
|||
|
α |
|
B |
|
Р Ф3 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
h |
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
M03( R ) |
G3 |
||||
Первое приближение. Полагая силы трения = нулю, запишем уравнения кинетостатики для ползуна:
|
|
|
|
|
в) |
|
|
R23 |
R03 |
3 |
|||
|
α |
|
B |
|
Р Ф3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h |
|
|
|
|
F |
|
|
M03( R ) |
G3 |
||||
ползуна, полагая, что сила трения F известна.R23(2) cos P Ф3 fG3 f (P Ф3 )tg 0,
R23(2) sin G3 R03(2) 0,
R23(1) cos P Ф3 0, R03(1) G3 R23(1) sin 0,
M 03( R)(1) 0.
Реакции в первом приближении:
R(1) |
|
P Ф3 |
, |
R03(1) G3 (P Ф3 )tg , M03(R)(1) |
|
||||
23 |
|
cos |
|
|
|
|
|
||
Сила трения F, действующую на ползун со
F fR03 fG3 f (P Ф3)tg , (5.19),где f
поступательной паре.
0. (5.18)
стороны стойки:
– коэф. трения в
Второе приближение. Составим уравнения кинетостатики для
M ( R)(2) fh G |
P Ф |
3 |
|
0. |
|
|
|
|
|
|||||||||
03 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Отсюда найдем силы реакции во втором приближении: (5.21) |
|
|||||||||||||||||
R(2) |
|
P Ф3 |
|
|
fG3 |
|
f (P Ф3 )tg |
, |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||||||||
23 |
|
cos |
|
cos |
|
|
|
cos |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
(2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
, |
|
Из сравнения выражений (5.21) и (5.18) видно, что |
|
R03 |
G3 (P Ф3 )tg fG3tg f (P Ф3 )tg |
|
|
|
||||||||||||||
M ( R)(2) fh G P Ф |
3 |
. |
|
|
|
|
|
|||||||||||
03 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|||
значения всех сил реакций изменились: |
|
|
|
|
|
|||||||||||||
R(2) R(1) (1 ftg ) |
fG3 |
, |
|
R03(2) R03(1) (1 ftg ), |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
||||||||||||
23 |
23 |
|
|
|
cos |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
а момент M (R) |
стал ненулевым. Полагая, что |
R |
R(2) |
, можно найти силу трения F fR |
и, считая ее |
|||||||||||||
|
03 |
|
|
|
|
|
|
|
|
|
|
|
03 |
03 |
03 |
|||
известной, найти следующее, третье приближение, и т.д.
Вопрос 16. Силовой расчет механизмов с учетом трения в КП. Решение нелинейных уравнений силового анализа. Пример: кривошипно-ползунный механизм. Режимы: тяговый, инверсный тяговый,
оттормаживания, самоторможения. Система уравнений кинетостатики для ползуна:
в)
R23 |
R03 |
3 |
 α
α B
B  Р Ф3
Р Ф3
h |
F |
|
M03( R ) G3
G3ctgα – (P + Ф3) < 0
G3ctgα – (P + Ф3) > 0
–R23cosα + (P + Ф3) + fR03signR03 = 0,
R23sinα + R03 – G3 = 0, (5.25) –R03a + fR03h = 0
Здесь а – расстояние от оси шарнира В до линии действия силы
реакции R03 , |
Из второго уравнения (5.25) выразим R23: R |
G3 R03 . |
||||||||||
|
|
|
|
|
|
|
23 |
|
sin |
|
||
|
|
|
|
|
|
|
|
|
|
|||
Подставляя R23 |
в первое уравнение : |
R03 |
|
G3ctg (P Ф3 ) |
|
(5.26) |
|
|||||
|
|
|
|
|
ctg f signR03 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||
|
«малое» трение: f < ctgα |
|
«большое» трение: f > ctgα |
|
|
|
|
|||||
|
|
|
|
|
|
|||||||
|
Вариант 1.1 |
|
Вариант 1.2 |
|
|
|
|
|
|
|||
|
Вариант 2.1 |
|
Вариант 2.2 |
|
|
|
|
|||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Вариант 1.2. «Большое» трение; рабочая нагрузка P и сила инерции Ф3 направлены против скорости ползуна.
Уравнение (5.26) не |
имеет решения. Действительно, положив R03 > 0 (sign R03 = + 1), получим |
|||
R |
G3ctg (P Ф3 ) |
0 ,т.к. числитель дроби отрицательный, а знаменатель – положительный. При R03<0 |
||
|
||||
03 |
ctg f |
|
|
|
|
|
|
|
|
(sign R03 = – 1) имеем |
R G3ctg (P Ф3 ) 0 , поскольку числитель и знаменатель дроби отрицательные. |
|||
|
|
03 |
ctg f |
|
|
|
|
||
Получающееся противоречие показывает, что решения не существует. Этот случай соответствует режиму самоторможения, при котором в рассматриваемом положении механизма и при заданном направлении силы движение вообще становится невозможным. Вариант 2.2. «Большое» трение; силы P и Ф3 направлены против оси х («помогают» движению ползуна). Тогда уравнение (5.26) имеет два решения. Действительно,
полагая, что R03 |
> 0 (sign R03 |
= + 1), имеем: R |
G3ctg (P Ф3 ) 0 ,поскольку числитель и знаменатель |
||||
|
|
03 |
|
ctg f |
|
|
|
|
|
|
|
|
|
||
дроби положительные. Положив R03 < 0 (sign R03 |
= – 1), получаем второе решение R G3ctg (P Ф3 ) |
0 , |
|||||
|
|
|
03 |
ctg f |
|
||
|
|
|
|
|
|
|
|
поскольку числитель положительный, а знаменатель отрицательный. В этом случае мы имеем дело с режимом оттормаживания: при «большом» трении движение возможно в том случае, когда вектор Р + Ф3 направлен так же, как и скорость ползуна. Существование двух режимов оттормаживания является одним из парадоксов Кулонова трения. Установить, какое из решений будет фактически осуществляться, строго говоря, в рамках модели механизма с жесткими звеньями невозможно. Можно только показать, что некоторые «физические» соображения свидетельствуют в пользу первого решения. при увеличении коэффициента трения f следует ожидать увеличения модуля силы трения |F| , т.е. должно быть d|F|/df>0. Исследуя первое решение, получаем
| F | |
G3ctg (P Ф3 ) |
f |
G3ctg (P Ф3 ) |
|
f |
,поскольку G3ctgα – |
(P |
+ |
Ф3) > 0. Следовательно, |
|||||||||||||||||
|
|
|
||||||||||||||||||||||||
|
|
|
|
ctg f |
|
|
|
|
|
|
|
ctg f |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
ctg f f |
|
|
|
|
|
|
|
|
ctg |
|
|
|
|
|
|
|
|
|||||
|
d |
F |
|
G3ctg (P Ф3 ) |
|
G3ctg (P Ф3) |
|
0 . |
|
|
|
|
|
|
||||||||||||
|
df |
(ctg f )2 |
(ctg f )2 |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Для второго решения находим | F | |
|
G3ctg (P Ф3 ) |
f |
|
G3ctg (P Ф3 ) |
|
f |
|
, |
|||||||||||||||||
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
ctg f |
|
|
|
|
|
|
ctg f |
||||||||
|
|
|
|
ctg |
|
|
|
|
||||||||||||||||||
поскольку ctgα – f < 0. Следовательно, |
d |
F |
G3ctg (P Ф3 ) |
|
|
0 . |
|
|
||||||||||||||||||
df |
(ctg f )2 |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Поэтому второе решение является с физической точки зрения «недостоверным».
Сведем все найденные решения в табл. Для удобства сравнения результатов, полученных двумя методами, разделим числитель и знаменатель дроби выражения (5.26) на ctgα.
|
«Малое» трение: f < ctgα |
«Большое» трение: f > ctgα |
|
|
|
G3ctgα – (P + Ф3) < 0 |
|
R03 |
|
G3 (P Ф3 ) tg |
0 |
Нет решения. |
|
|||||||||||||
|
|
|
|
1 f tg |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Режим самоторможения |
|||||||||
|
|
Тяговый режим |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
G P Ф |
tg |
|
|
|
|
|
|
|
|
|||||||
Метод |
последовате |
R |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
03 |
|
3 |
3 |
|
|
|
|
|
– |
|
|
|
|
|
||||
приближений |
|
1 f |
tg ... ( f |
tg )k |
... |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
R03 |
|
G (P Ф |
|
) tg |
0 |
R |
|
G3 ctg (P Ф3 ) |
|
0 |
||||||||
|
|
|
|
|
|
|||||||||||||||
|
|
3 |
|
3 |
|
|
|
03 |
|
|
ctg f |
|
||||||||
G3ctgα – (P + Ф3) > 0 |
|
|
1 f |
tg |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
G3 ctg (P Ф3 ) |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
0 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Инверсный тяговый режим |
03 |
|
|
ctg f |
|
|||||||||||||
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Режим оттормаживания |
|||||
|
|
|
G P Ф |
tg |
|
|
|
|
|
|
||||||||||
Метод последовательных |
R |
|
|
|
|
|
|
|
||||||||||||
|
|
03 |
|
|
|
3 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
приближений |
[ּ1 f |
|
tg ( f tg )2 ...+ |
|
|
|
|
|
|
|||||||||||
|
|
+( 1)k ( f tg )k |
...] |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Определив силы реакций, действующие на ползун, легко найти остальные реакции, возникающие в механизме. Так, рассматривая равновесие звена 2, получаем (m2 0): R12 = R23, а уравнения кинетостатики для звена 1 дают (рис. 5.11): R01 R12 , Q = R12H, где H – расстояние от точки О до линии АВ
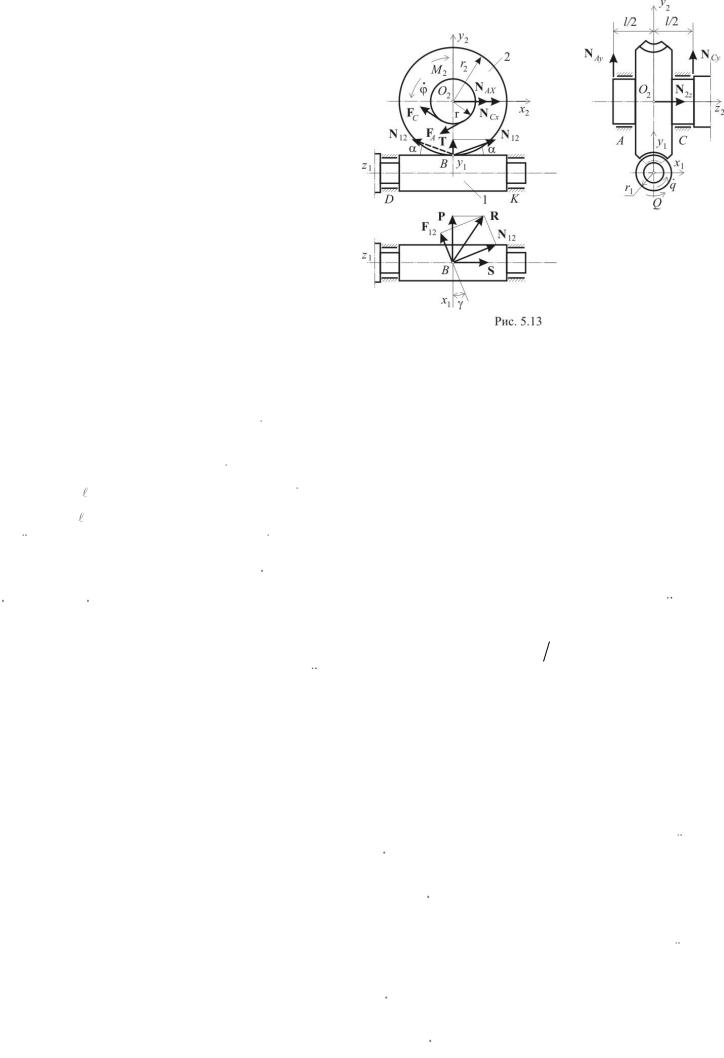
17. Силовой расчет червячной передачи с учетом трения в ВКП. Режимы: тяговый, инверсный тяговый, оттормаживания,
самоторможения.Червячная передача содержит
одну |
высшую пятиподвижную кинематическую |
||
пару, |
динамическая |
модель |
которой |
представляется уравнениями (5.16), и две вращательные пары. Пренебрежем трением во вращательных парах, поскольку оно обычно оказывается значительно менее существенным, чем трение в червячном зацеплении. Сначала составим уравнения кинетостатики для червячного колеса. Положим, что оси координат О2xyz являются главными центральными осями инерции
колеса. Используем соотношения (5.16). Обозначим: r2 – начальный радиус червячного колеса, J20 – момент инерции колеса относительно оси О2z (точка О2 совпадает с центром масс колеса). Проецируя силы, действующие на колесо, на оси координат О2xyz и составляя уравнения моментов относительно этих осей, получаем систему шести уравнений с шестью неизвестными (NAx, NAy, NCx, NCy, N2z, N12):
N Ax NCx N12 (cos cos f sign N12 sin sign ) 0, N Ay NCy N12 sin 0,
N2 z N12 (cos sin f sign N12 cos sign ) 0,
|
|
N12 (cos sin f sign N12 cos sign )r2 |
NCy N Ay |
0,5 |
|
NCx N Ax 0,5 |
0, |
|
J20 M 2 |
N12 (cos cos f sign N12 sin sign )r2 0. |
|
(5.36)
0,
Пусть направление угловой скорости совпадает с показанным на рисунке:
> 0 (sign = +1). Из последнего уравнения (5.36) |
определим N12: N |
M2 J20 |
. |
||
|
|
|
12 |
(cos cos f sin sign N12 )r2 |
|
|
|
|
|
|
|
(5.37) Формулу (5.37) иногда записывают в другом виде. Обозначив tg ч f |
cos , где ψч – угол трения в |
||||
червячной передаче, получим: N |
(M2 J20 )cos ч |
, |
где знак «+» или «–» в знаменателе устанавливается в |
||
12 |
r2 cos cos( ч ) |
|
|
|
|
|
|
|
|
||
зависимости от режима движения червячной передачи. Отметим, что для более точного расчета червячной передачи следует учитывать зависимость коэффициента трения и, следовательно, угла трения от скорости скольжения Vск и от режима движения. В табл. приведены значения N12 для разных режимов.
Тяговый режим: |
|
N12 |
M2 J20 |
|
. |
|||
Q q > |
0 |
(ведущий |
(cos cos f sin )r2 |
|||||
|
||||||||
червяк), |
|
|
Пример: |
груз |
||||
|
|
поднимается. |
|
|
|
|||
(М2+J20) < 0 (ведомое |
|
|
|
|||||
|
|
|
|
|
||||
колесо). |
|
|
|
|
|
|
|
|
Инверсный |
тяговый |
N12 |
M2 J20 |
|
. |
|||
режим |
|
|
(cos cos f sin )r2 |
|||||
|
|
|
||||||
(при ψч < γ): |
|
Пример: |
груз |
|||||
Q q < |
0 |
(ведомый |
опускается. |
|
|
|
||
червяк), |
|
|
|
|
|
|
|
|
(М2+J20) > 0 (ведущее |
|
|
|
|
|
|||
колесо). |
|
|
|
|
|
|
|
|
ВОПРОС № 18. Уравнения движения механизма в форме уравнения Лагранжа 2- ого рода. Определение приведенного момента инерции и приведенного момента сил сопротивления (для рычажного и зубчатого механизма) Уравнение Лагранжа второго рода
для механической системы (в данном случае – механизма) было получено в курсе
теоретической |
|
механики: |
||||||
|
d T |
|
T |
Q QC , (6.1)где |
Т(q, q ) – |
|||
|
|
|
|
|
|
|||
|
dt q |
q |
||||||
|
|
|
|
|||||
Оттормаживание: |
|
|
|
|
|
|
||||
Q q |
> |
0 |
(ведущий |
N12 |
|
M2 J20 |
|
. |
||
(cos cos f sin )r2 |
||||||||||
червяк), |
|
|
|
|||||||
|
|
Пример: |
|
|
груз |
|||||
(М2+J20) > 0 (ведущее |
|
|
||||||||
опускается. |
|
|
|
|||||||
|
|
|
|
|
|
|
||||
колесо). |
|
|
|
|
|
|
|
|
||
Самоторможение |
Движение невозможно. |
|||||||||
(при ψч > γ): |
|
Например, |
невозможно |
|||||||
Q q |
< |
0 |
(ведомый |
опускание |
груза |
под |
||||
червяк), |
|
|
действием |
|
силы |
|||||
|
|
тяжести. |
|
|
|
|
||||
(М2+J20) > 0 (ведущее |
|
|
|
|
||||||
|
|
|
|
|
|
|||||
колесо). |
|
|
|
|
|
|
|
|
||
кинетическая энергия механизма, представленная как функция от обобщенной координаты и обобщенной
N |
|
rCi |
|
i |
|
|
скорости; Q – обобщенная движущая сила; QC PCi |
M0( PiC ) |
, (6.2)– обобщенная сила |
||||
q |
q |
|||||
i 1 |
|
|
|
|||
сопротивления, соответствующая всем активным силам, кроме движущих. В механизме с одной степенью
подвижности кинетическая энергия может быть представлена в форме T |
1 |
a( q) 2q(6. .3) Если q – |
|
2 |
|||
|
|
||
линейная обобщенная координата, то инерционный коэффициент a(q) m(q) |
называется приведенной |
||
массой механизма; при угловой обобщенной координате a(q) имеет размерность момента инерции и называется приведенным моментом инерции. В дальнейшем будет предполагаться, что q – угловая
координата, и выражение (6.3) записывается в форме T 12 J( q) q2 ,(6.4) где J(q) – приведенный момент
инерции. |
|
Подставляя |
(6.4) |
в |
(6.1) |
и |
|
учитывая, |
что |
T |
|
1 |
J (q)q2 , |
||||||
|
|
q |
|
||||||||||||||||
|
|
2 |
|||||||||||||||||
|
d T |
|
d |
|
2 |
J (q)q, получаем J (q)q |
1 |
|
2 |
Q QC .(6.5) |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
dt q |
dt |
J (q) q J (q)q |
|
2 |
J (q)q |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
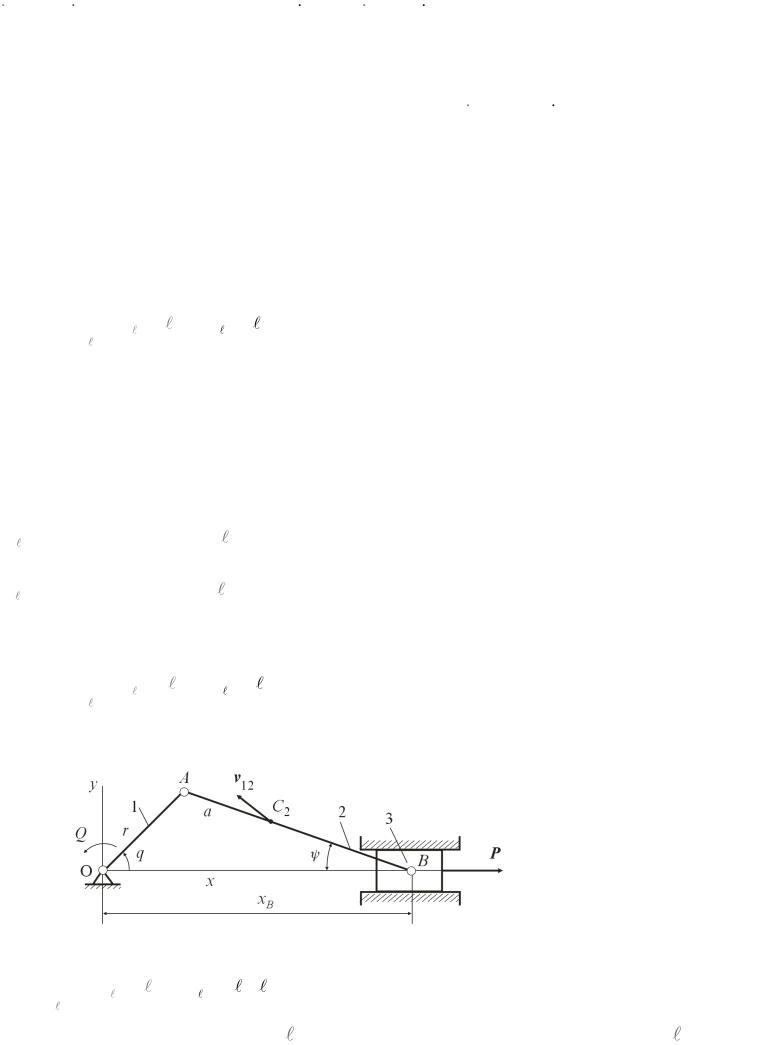
Рассмотрим кривошипно-ползунный механизм, показанный на рис. 6.1.
Кинетическую энергию механизма определяем как сумму кинетических энергий его подвижных звеньев. Для вращающегося звена 1 имеем T1 12 J10q2 ,
где J10 – момент инерции звена относительно оси вращения. Для поступательно движущегося ползуна 3
получаем T3 12 m3 xB2 . Для звена 2, совершающего сложное движение, находим кинетическую энергию,
пользуясь теоремой Кёнига, известной из курса теоретической механики: T2 12 (m2vC2 2 J2C 22 ), где m2 –
масса звена, J2C – его момент инерции относительно оси, проходящей через центр масс С2 и
перпендикулярной плоскости движения; vC2 – скорость центра масс; 2 – угловая скорость. Таким образом, учитывая, что
|
|
|
dx |
|
|
|
|
dx |
|
2 |
|
dy |
|
2 |
|
|
|
|
|
|
d |
|
|
|
|||||||||||
x |
B |
q;v2 |
|
|
|
|
|
C 2 |
|
|
|
|
|
|
C 2 |
|
q2 |
; |
|
|
|
q, |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
B |
|
dq |
|
C 2 |
|
|
dq |
|
|
dq |
|
|
|
2 |
|
|
|
dq |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T T1 T2 T3 |
|
|
|
|
|
|
|
|||||||||||
|
1 |
|
|
|
|
dx |
|
2 |
|
dy |
|
2 |
|
|
|
d |
|
2 |
|
dx |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
||||||||||||||||||||||
|
|
J10 |
m2 |
|
|
C 2 |
|
|
|
|
|
C 2 |
|
|
|
|
JC2 |
|
|
|
|
|
m3 |
|
|
|
|
||||||||
2 |
dq |
|
|
dq |
|
|
dq |
dq |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где – угол поворота звена 2, получаем
|
2 |
|
|
1 |
|
(6.6) |
|
|
|
|
|||
|
|
q2 |
|
J (q)q2. |
|
|
|
|
|
||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
Выражение, стоящее в фигурных скобках, представляет собой приведенный момент инерции механизма J(q). Используя функции положения xC2(q), yC2(q), (q), xB(q), можно было бы представить J(q) в явной форме; однако это аналитическое выражение даже для такого сравнительно простого рычажного механизма
оказывается достаточно громоздким. Еще более сложным является выражение J (q) . Поэтому на практике часто используются приближенные представления этих функций, основанные на их разложении в ряды Фурье. Легко видеть, что J(q) – периодическая функция с периодом 2 ; она представима в виде ряда:
|
|
|
J (q) J0 (JC |
cos q JS sin q). |
(6.7) |
1 |
|
|
Для определения коэффициентов Фурье J0, JC1, … , JS1, … вычисляются значения J(q) при некоторых дискретных значениях q, например, при q = 2 k/m (k=1, … m). Для этого используется выражение для J(q) в форме (6.6), а значения производных от функций положения определяются в процессе кинематического анализа механизма. Затем используются известные приближенные соотношения, выражающие
коэффициенты |
Фурье |
через |
дискретные |
значения |
периодической |
функции: |
|||||||
|
|
1 |
|
m |
|
|
|
|
|
|
|||
J0 |
|
J (2 k / m), |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|||||||
|
|
m k 1 |
|
|
|
|
|
|
|||||
|
|
|
|
2 |
|
m |
|
|
|
|
|
|
|
JC |
|
|
J (2 k / m) cos(2 k |
/ m), (6.8) |
|
|
|
||||||
|
|
|
|
|
|||||||||
|
|
|
|
m k 1 |
|
|
|
|
|
|
|||
|
|
|
|
2 |
|
m |
|
|
|
|
|
|
|
JS |
|
|
J (2 k / m)sin(2 k |
/ m). |
|
|
|
|
|||||
|
|
|
|
|
|
||||||||
|
|
|
|
m k 1 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Далее составляется приближенное представление функций J(q) и J (q) : |
|
|
|||||||||||
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
J (q) J0 (JC |
cos q JS |
sin q), |
(6.9) |
|
|
|
|||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
Рис. 6.1 |
|
r |
|
q JS cos q) . (6.10) |
|
sin |
||
J (q) ( JC |
|||
|
1 |
|
|
Удовлетворительная аппроксимация для – й гармоники получается только при условии m 4 . Следует также иметь в виду, что пренебрежение высшими гармониками в выражении для приведенного момента
инерции ограничивает область применимости уравнения (6.5). Для составления уравнения Лагранжа необходимо также определить обобщенную силу QС как функцию от q, q,t. Предположим, что силами тяжести звеньев механизма можно пренебречь, и единственной активной силой сопротивления является сила P (см. рис.6.1), возникающая при выполнении рабочего процесса и зависящая от xB и xB . Тогда по формуле (6.2) находим
Q P |
dxB |
P |
x |
|
(q), |
dxB |
q |
|
dxB |
Q (q, q).(6.11) Обобщенная сила QС часто называется приведенным |
|
B |
|
|
|||||||
C |
dq |
|
|
|
dq |
C |
||||
|
|
|
|
|
dq |
|
||||
моментом сил сопротивления. |
Функция QС(q, q ) является также периодической по q с периодом 2 . Если |
|||||||||
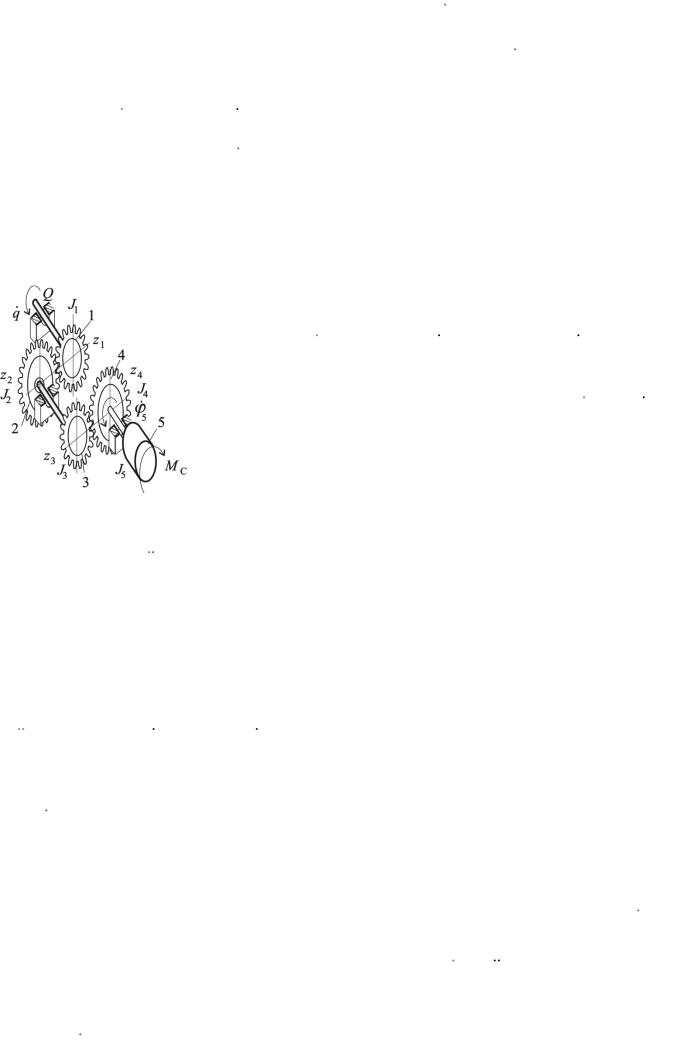
входное звено связано с кривошипом передаточным механизмом с передаточным отношением i, то период равен 2 i. В качестве второго примера рассмотрим механизм с линейной функцией положения, показанный на рис. 6.2. Он состоит из двухступенчатой передачи (колеса 1 – 4) и ротора 5. Пусть J1, J2, J3, J4, J5 – моменты инерции вращающихся масс относительно их осей вращения; z1, z2, z3, z4 – числа зубьев колес; MС – момент сил сопротивления, приложенных к ротору. Составляя выражение для кинетической энергии системы, имеем
T |
1 |
J q2 |
(J |
|
|
J |
|
)( q |
z1 |
)2 (J |
|
|
J |
|
)(q |
z1z3 |
|
)2 |
|
|
||||||||||||
|
|
2 |
3 |
|
4 |
5 |
|
|
|
|||||||||||||||||||||||
|
|
|
2 |
|
1 |
|
|
|
|
|
z2 |
|
|
|
|
|
|
z2 z4 |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
1 |
|
J (J |
|
J |
|
)( |
z1 |
)2 (J |
|
|
J |
|
)( |
z1z3 |
)2 |
q2 |
1 |
Jq2 . |
|||||||||||||
|
2 |
3 |
|
4 |
5 |
|
|
|||||||||||||||||||||||||
2 |
|
|
1 |
|
|
|
|
z2 |
|
|
|
|
|
z2 z4 |
|
|
|
2 |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
(6.12)В этом случае приведенный момент инерции не зависит от |
|||||||
|
|
|
|
|
координаты q. Обобщенная сила QС определяется в соответствии с |
|||||||
|
Рис. 6.2 |
|
(6.2): Q M |
|
z1z3 |
. (6.13) Подставляя (6.12) и (6.13) в (6.5), |
||||||
|
C |
|
||||||||||
|
|
|
|
|
C |
z2 z4 |
||||||
|
|
|
|
|
|
|
|
|
|
|
||
получаем уравнение движения J q Q M |
|
z1z3 |
, (6.14) где |
|||||||||
C |
|
|||||||||||
|
|
|
|
|
|
|
z2 z4 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
J J1 (J2 |
J3 )( |
z1 |
)2 (J4 |
J5 )( |
z1z3 |
)2 |
(6.15)– приведенный момент инерции механизма. Отметим, |
|||||
|
|
|||||||||||
|
|
z2 |
|
z2 z4 |
|
|
|
|
|
|
||
что при приведении вращающихся масс момент инерции каждой из них делится на квадрат передаточного
отношения, связывающего эту массу с входным звеном. |
Уравнение Лагранжа второго рода может быть |
||||||||
использовано, так же как и уравнение Даламбера-Лагранжа, для определения обобщенной движущей силы Q. |
|||||||||
При |
заданном |
законе |
движения |
входного |
звена |
из |
уравнения |
(6.5) |
находим: |
Q(t) J q(t) q(t) 0,5J q(t) q2 QC q(t), q(t),t . (6.16) |
Однако |
роль уравнений |
Лагранжа в |
||||||
динамике машин этим не исчерпывается. Как уже отмечалось, они используются так же, как дифференциальные уравнения движения механической системы машины, из которых определяется закон движения q(t). В обоих случаях для составления уравнений Лагранжа необходимо знать зависимости
J (q), J (q),QC (q,q). Определение этих функций в аналитической форме требует обычно достаточно
громоздких преобразований, связанных с составлением выражения для кинетической энергии и его дифференцированием, а также с определением работы активных сил. В связи с этим для решения первой задачи (определения обобщенной движущей силы по заданному закону движения) чаще всего используются уравнения кинетостатики или уравнения Даламбера-Лагранжа. Более того, легко показать, что эти же
уравнения позволяют определить для заданного значения q величины J , J , |
а при заданных q и q – |
величину QС. Действительно, пусть мы определили с помощью, например, |
уравнений кинетостатики |
величину обобщенной движущей силы Q при следующих условиях: q q ,q 0,q 1c 2 , P 0, т.е. при нулевом значении угловой скорости входного звена, единичном угловом ускорении и при отсутствии активных сил (что эквивалентно QС = 0). Предположим, что при этих условиях Q Q1 (Hм). Подставив
выбранные значения q,q,Q |
в уравнение (6.16), находим, что |
Q |
(Нм) J (q )(Нмс2 ) 1(с 2 ), т.е. что |
C |
1 |
|
|

величина Q1 численно совпадает с величиной J(q ), выраженной в Нмс2. Таким образом, для определения J(q ) нет необходимости составлять выражение для кинетической энергии механизма, его можно определить с помощью уравнений кинетостатики, если их применить для некоторого «условного» закона движения. Задавая различные значения q и повторяя эту процедуру, найдем значения J(q) в ряде дискретных точек, что позволяет аппроксимировать эту функцию, например, отрезком ряда Фурье (6.9). Найдем теперь Q Q2
(Нм) при q=q , q 1c 1, q 0 и при отсутствии сил сопротивления. Подставив эти значения в (6.16), получим J (q )(Нмс2 ) 1с 2 Q2 . Наконец, задав q q ,q q ,q 0, найдем Q Q3 при заданных силах сопротивления; тогда из (6.16) получим QC (q ,q ) 0,5J (q )q2 Q3 .
ВОПРОС № 19 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Уравнения Лагранжа 2-ого рода для механизма с несколькими степенями подвижности. Уравнения |
|||||||||||||||||||||||||||||||||||||||
Лагранжа второго рода для механизма с w степенями подвижности, с жесткими звеньями и идеальными |
|||||||||||||||||||||||||||||||||||||||
кинематическими парами могут быть получены из общего уравнения динамики, записанного в форме (4.28). |
|||||||||||||||||||||||||||||||||||||||
Работа сил инерции на возможном перемещении, входящая в это уравнение, может быть выражена через |
|||||||||||||||||||||||||||||||||||||||
кинетическую |
энергию |
|
системы. |
|
|
Для |
|
механизма |
с |
w |
степенями |
подвижности |
справедливо: |
||||||||||||||||||||||||||
N |
|
|
r |
|
M(Ф) |
|
|
|
|
w |
T |
d T |
|
|
|
|
|
|
|
|
|
|
qw, q ,...,q ) |
|
|
|
|
||||||||||||
|
(Ф |
|
) |
= |
|
|
q |
s, |
(6.17) |
где Т(q1, |
…, |
– кинетическая энергия |
|||||||||||||||||||||||||||
|
i |
|
|
0i |
|
0i |
|
i |
|
|
|
|
qs |
|
|
|
dt qs |
|
|
|
|
|
|
|
|
|
|
1 |
w |
|
|
|
|
||||||
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
механизма с w степенями подвижности, представленная как функция от обобщенных координат и их |
|||||||||||||||||||||||||||||||||||||||
производных. В результате при независимых обобщенных координатах уравнения (4.34) приводятся к виду: |
|||||||||||||||||||||||||||||||||||||||
d T T Q Q |
|
|
(s |
|
|
= |
|
1, |
… |
, |
w) |
, |
(6.18) |
где |
Qs |
– |
обобщенные |
движущие |
силы; |
||||||||||||||||||||
dt qs |
|
|
qs |
s |
|
|
|
Cs |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
QCs |
|
|
N |
|
|
rci |
M0( PiC ) |
|
|
(6.19) – |
обобщенные силы |
|
сопротивления, |
соответствующие |
всем |
||||||||||||||||||||||||
PCi |
i |
|
|||||||||||||||||||||||||||||||||||||
|
|
|
i 1 |
|
qs |
|
|
|
|
|
|
qs |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
активным силам, кроме движущих. Кинетическая энергия каждого звена в общем случае определяется как |
|||||||||||||||||||||||||||||||||||||||
кинетическая |
энергия |
|
твердого |
|
|
тела, |
|
совершающего |
сложное |
|
пространственное |
движение: |
|||||||||||||||||||||||||||
Ti |
|
1 |
mi vci2 |
Ωi(i)T JсiΩi(i) , (6.20) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где i – номер звена, mi – его масса, vci – скорость центра масс, Jсi – тензор инерции в системе осей, начало |
|||||||||||||||||||||||||||||||||||||||
которой находится в центре масс i-го звена, |
Ωi(i) |
|
– |
трехмерный |
вектор-столбец абсолютной угловой |
||||||||||||||||||||||||||||||||||
скорости. Учитывая, что |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
Jix |
|
Jixy |
|
|
|
Jixz сi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
Jixy |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Jсi |
Jiy |
|
|
|
Jiyz |
, (6.21) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
J |
ixz |
J |
iyz |
|
|
|
J |
iz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
где Jix, Jiy, Jiz – осевые моменты инерции i-го звена, Jixy, Jixz, Jiyz – центробежные моменты инерции, а |
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
(i) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ix |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Ωi(i) |
iy(i) |
, (6.22) |
где |
ix(i) , iy(i) , iz(i) |
– |
проекции |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
(i) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
iz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|||
вектора |
угловой |
скорости |
i-го звена Ωi |
на оси i-й |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
3 |
|
|
|||||||||||||||||||||||||||||
системы координат, выражение (6.20) запишем в виде: |
|
|
1 |
|
|
|
|
2 |
Q3 |
|
|
||||||||||||||||||||||||||||
Ti 1 mi xci(0) 2 |
yci(0) 2 zci(0) 2 |
1 Jix ix(i) 2 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
Jiy iy(i) |
2 Jiz iz(i) 2 |
q3 |
C3 |
M |
|
||||||||||||||||||||||||||||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C2 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
q2 |
А |
|
|
|
|
|
|
||||||
|
|
|
(i) (i) 2J |
|
|
(i) (i) |
|
|
|
|
(i) (i) |
. |
|
|
|
|
|
|
В |
l3 |
|
|
|
||||||||||||||||
2J |
|
|
|
2J |
|
|
|
|
|
|
|
|
l2 |
|
|
|
|||||||||||||||||||||||
ixy |
ixz |
iyz |
|
|
|
|
|
Q2 |
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
ix |
|
iy |
|
|
ix |
iz |
|
|
|
iy |
iz |
|
|
|
|
|
|
|
|
a |
|
b |
|
F |
|||||||||||
(6.23) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q1 |
|
|
q1 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
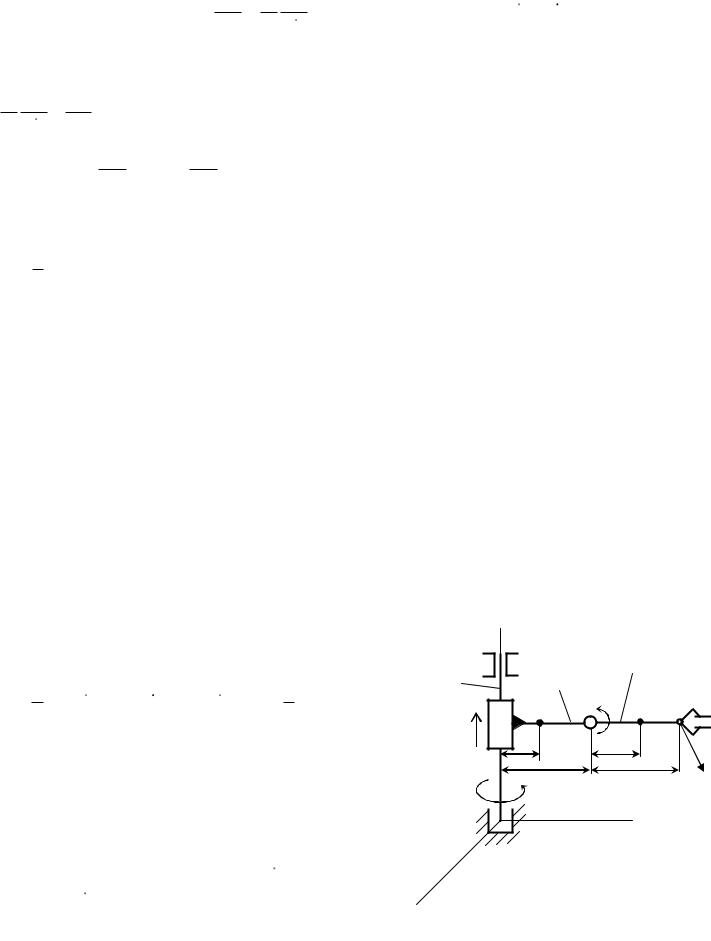
В качестве примера рассмотрим схему трехподвижного |
|
|
|
0 |
|
|
|
|
y |
|
|
||||||||||||||||||||||||||||
механизма (рис. 6.3). Звено 1 вращается вокруг своей |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
продольной оси с угловой скоростью q1 . По звену 1 со |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
скоростью |
q2 движется звено 2. Звено 3, |
связанное со |
x |
|
|
Рис. 6.3 |
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
a) |
х2 |
|
б) |
y3 |
|
|
|
звеном 2 шарниром В, вращается относительно звена |
||||||||
|
|
|
|
|
2 с угловой скоростью |
q3 . На звене 3 имеется схват, |
|||||||||||
|
|
|
|
Q3 |
|
3 |
|
|
|||||||||
|
|
2 |
|
|
|
|
в точке М которого приложена активная сила F . |
||||||||||
|
|
|
|
|
|
|
|||||||||||
|
|
|
q3 |
|
|
|
|
Центры масс второго и третьего звеньев находятся в |
|||||||||
|
|
|
z2 |
|
|
M |
|
||||||||||
|
А |
|
|
|
|
|
точках |
С2 |
и |
С3 |
соответственно. |
Кинетическую |
|||||
q2 |
|
|
|
|
|
|
|||||||||||
C2 |
В |
В |
C3 |
|
|
x3 |
энергию |
|
механизма |
определим |
как |
сумму |
|||||
|
|
|
|
||||||||||||||
Q2 |
|
|
|
кинетических энергий его подвижных звеньев. Для |
|||||||||||||
|
|
|
|
|
|
|
|
||||||||||
|
y2 |
|
|
z3 |
|
|
|
|
вращающегося |
звена |
1 имеем T |
1 J |
1z |
q2 , где |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 6.4 |
|
|
|
|
|
J1z – момент инерции звена 1 относительно оси z1, |
||||||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
совпадающей с осью его вращения.
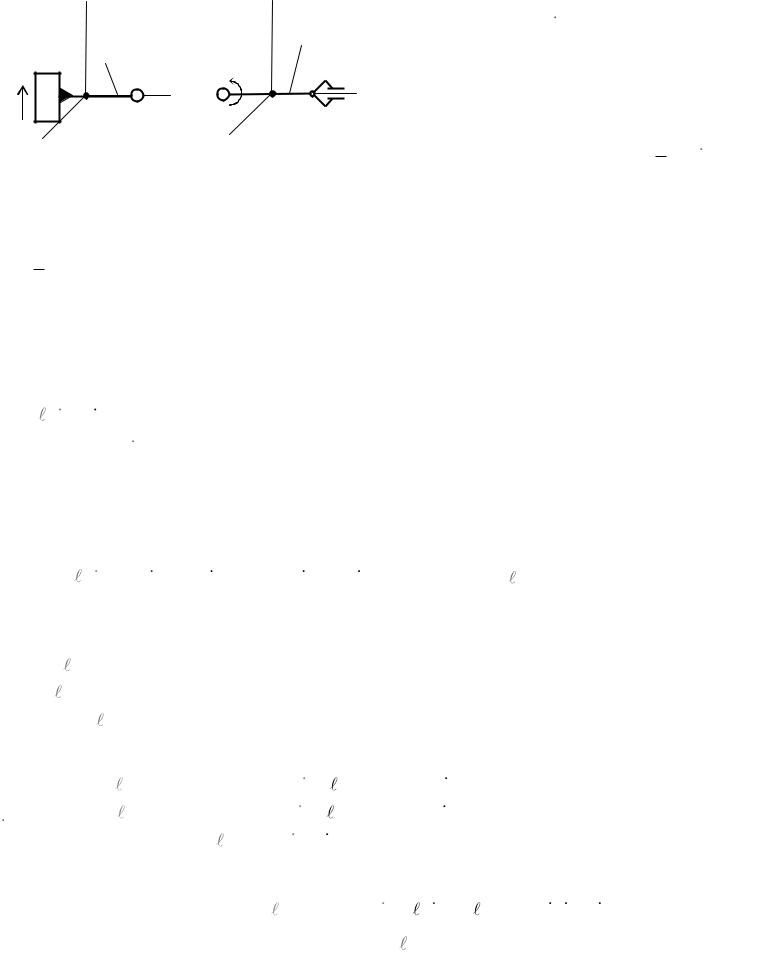
Звено 2 вращается вместе со звеном 1 и перемещается по нему, его кинетическая энергия равна:
T2 12 m2 vc22 Ω(2)2 T J2Ω(2)2 ,
где vс2 – скорость центра масс второго звена, m2 – его масса, J2 – тензор инерции, построенный в осях С2x2y2z2 (рис. 6.4, а), Ω(2)2 – вектор-столбец угловой скорости звена 2, составленный из проекций угловой скорости на оси той же системы координат С2x2y2z2.
Найдем vс2 |
и Ω(22) : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
v2 2 q2 |
|
q2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
с2 |
2 |
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
(2)2 x |
|
q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
(2) |
|
|
|
(2) |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Ω2 |
|
2 y |
|
|
0 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
(2) |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
2 z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Подставим найденные значения в выражение для кинетической энергии Т2: |
|
||||||||||||||||||||||||||
T2 |
1 |
m2 |
22q12 m2q22 |
J2 xq12 |
|
1 |
J2 z q12 |
m2q22 , |
где |
J2 z m2 |
22 J2 x . Кинетическая энергия |
||||||||||||||||
2 |
2 |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
T |
1 |
|
mv |
2 |
Ω |
( T3 ) |
JΩ |
|
( |
3 |
) |
|
|
|||||
третьего |
звена |
Т3: |
|
|
|
|
|
. |
|
Найдем |
скорость |
центра масс третьего звена vс3. |
|||||||||||||||
2 |
|
|
3 |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
3 |
3 |
|
с |
3 |
3 |
|
|
3 |
|
|
|
|
|||||
|
|
3 sin q1 cos q3 a sin q1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
3 |
cos q cos q |
a cos q |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
r(0) |
|
|
1 |
|
|
3 |
|
|
|
1 |
, |
|
|
|
|
|
|
|
|
|
|
|
|||||
c3 |
|
|
|
|
3 sin q3 q2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
( |
3 cos q1 cos q3 a cos q1)q1 |
|
3 sin q1 sin q3 |
q3 |
|
|
vc(0)3x |
|
||
|
|
|
( |
3 sin q1 cos q3 a sin q1)q1 |
|
|
q3 |
|
|
|
|
|
rc(0)3 |
v(0)c3 |
3 cos q1 sin q3 |
|
v(0) |
|
|||||||
|
|
|
|
|
|
|
|
c3 y |
|
|||
|
|
|
|
3 cos q3 q3 q2 |
|
|
|
(0) |
||||
|
|
|
|
|
|
|
vc3z |
|
||||
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|||
vc3 2 vc(0)3x 2 vc(0)3 y 2 vc(0)3z 2 3 cos q3 a 2 q12 23q32 2 3 cos q3 q2q3 q22 Положим, что звено
3 представляет собой тонкий однородный стержень, а 3 b 2. Тогда компоненты тензора инерции J3, построенного в осях С3x3y3z3 (рис. 6.4, б): J3x = 0; J3y = J3z = m3b2
2. Тогда компоненты тензора инерции J3, построенного в осях С3x3y3z3 (рис. 6.4, б): J3x = 0; J3y = J3z = m3b2  12 ; J3xy = J3xz = J3yz = 0. Угловая скорость Ω3(3)
12 ; J3xy = J3xz = J3yz = 0. Угловая скорость Ω3(3)