

Экзамен / TMM_otvety_2
.pdfБилет №1. Постановка задачи силового расчета. Силы, действующие в механизме. Уравнения движения системы. Кинематические пары, накладывающие идеальные связи. В теории механизмов и машин также ставятся и решаются две задачи динамики. В частности, первая задача динамики: при известном (заданном) законе движения ведущего звена (ведущих звеньев) механизма требуется найти силы, действующие в механизме. Решение этой задачи называют силовым расчетом. При силовом расчете механизма считаются известными все активные силы, действующие на звенья механизма, кроме обобщенных движущих сил. К заданным активным силам относятся: а) Рабочая нагрузка P – сила,
действующая на рабочее звено при выполнении рабочего процесса. Рабочая нагрузка обычно не является постоянной. Часто она изменяется по мере перемещения рабочего звена. В этом случае может быть построена зависимость Р = Р(х), где Р – рабочая нагрузка, х – координата точки приложения нагрузки. В более сложных случаях нагрузка зависит также от скорости x , ускорения x и времени t: P P(x, x, x,t) . Эти зависимости изучаются в специальных дисциплинах. При выполнении силового расчета они считаются заданными, но их
следует привести к более удобному виду. Учитывая, что x (q), |
x |
|
q , |
x |
2 |
|
q2 |
|
q , можно |
||
q |
q |
2 |
|
||||||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
q |
|
|||
получить зависимость рабочей нагрузки от обобщенной координаты и ее производных: P P* (q,q,q,t) .(4.1)
Если в механизме приложена не одна, |
а |
рабочих нагрузок, то для них задаются |
зависимостей: |
||
P |
P* (q,q,q,t) , (m = 1, |
2, … , ). |
(4.2) В многоподвижных механизмах координаты, скорости и |
||
m |
m |
|
|
|
|
ускорения точек приложения |
нагрузок |
Pm |
зависят от всех обобщенных координат и |
производных: |
|
xs s
где s
w |
|
w |
|
|
w |
|
s |
|
(q1,...,qw ); xs |
s qu ; xs |
s qu |
qu qm , (4.3) |
|||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
q |
|
q q |
|
|
|
q |
u 1 |
|
m 1 |
|
|||
u |
u |
u m |
||||||
u 1 |
|
|
|
|
|
|
||
– функции положения. Зная (4.3), можно получить зависимости рабочих нагрузок от обобщенных
координат и их производных: P |
P* (q ,...,q ,q ,...,q ,q ,...,q ,t) , (m = 1, … , ) . (4.4) В дальнейшем |
|||
m |
m 1 |
w 1 |
w 1 |
w |
будем предполагать, что рабочие нагрузки не зависят явно от времени и ускорений qu , поэтому выражения (4.4) будут представляться в форме:
P |
P* (q ,...,q ,q ,...,q ) , |
(m = 1, … , ) (4.5) (б) Cилы |
||
m |
m 1 |
w 1 |
w |
|
тяжести звеньев Gi, |
i 1, |
, N , где N – число звеньев..в) |
||
Упругие силы, возникающие при деформации пружин, также являются активными. Целью силового расчета является определение обобщенных движущих сил и реакций во всех кинематических парах. Обобщенные движущие силы – это обобщенные силы, которые необходимо приложить к входным звеньям механизма для того, чтобы получить заданное программное движение при выполнении рабочего процесса. Определив движущие силы, можно выбрать двигатели, приводящие в движение машину.Реакции в
Y |
|
MR |
M 0Ry |
|
0 |
|
|
|
R |
|
|
Ry |
|
M 0Rx |
0 |
R |
X |
|
||
M R Rz |
|
|
0 z |
|
1 |
z |
|
|
|
2 |
|
Z |
|
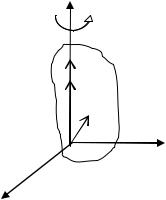
Рис. 4.1
кинематических парах – пассивные силы; как правило, это силы, распределенные по поверхностям соприкосновения конструктивных элементов, образующих пару. Рассмотрим вращательную кинематическую
пару (рис.4.1); главный вектор сил реакций R и главный момент M0R определяются заданием шести скалярных величин – их проекций Rx , Ry , Rz , MoxR , M0Ry , M0Rz на оси системы 0xyz. Число неизвестных
обобщенных движущих сил равно w, а число неизвестных компонент реакций – 6p. Таким образом, общее число неизвестных
nu = w + 6p = w + 6p1 + 6p2 + 6p3 + 6p4 + 6p5 . (4.6) Эти неизвестные могут быть определены решением уравнений движения звеньев механизма. Пусть число звеньев равно N. Если KS – вектор количества движения s–го звена, а LSO – его кинетический момент, то уравнения движения записываются в виде:
|
dKS |
gS |
|
dLS 0 |
gS |
|
|
|
|
|
|
|
|
Fsk ; |
rsk Fsk ,(s 1,..., N 1), (4.7) |
где Fsk |
– внешние силы, действующие на s–е |
||||||||
|
dt |
|
||||||||||
|
k 1 |
dt |
k 1 |
|
|
|
|
|
|
|||
звено, rsk – радиусы-векторы точек их приложения, gs |
– число сил, приложенных к s–му звену. Пусть |
|||||||||||
механизм |
не |
содержит |
избыточных |
связей. |
Тогда |
для |
него |
справедлива формул |
||||
|
|
|
|
|
5 |
|
|
|
|
|
|
|
w 6(N 1) (6 |
s) pS |
|
|
|
|
|
|
|||||
|
|
|
|
|
S 1 |
|
(4.8) |
|
|
|
|
|
6(N 1) 5 p1 4 p2 3 p3 2 p4 p5 , |
|
|
|
|
|
|||||||
где ps– число s–подвижных пар. Из уравнения (4.8) можно выразить |
число |
уравнений neq = 6(N–1): |
||||||||||
6(N 1) w 5 p1 4 p2 3p3 2 p4 p5 . |
Сравнивая число неизвестных nu |
и число уравнений neq , |
||||||||||
|
|
|
|
|
|
|
|
5 |
|
|
|
|
имеем: nu |
neq |
p1 |
2 p2 3 p3 4 p4 5 p5 spS . (4.9) |
|
|
|
||||||
S 1
При такой постановке задачи силового расчета число неизвестных всегда больше числа уравнений, что делает эту задачу неразрешимой. Она тем более неразрешима, если в механизме имеются избыточные связи, поскольку при этом число неизвестных реакций возрастает, а число уравнений остается неизменным.
Для того, чтобы задача стала разрешимой, необходимы дальнейшие уточнения. Одно из таких уточнений заключается в предположении о том, что все кинематические пары осуществляют идеальные связи. При идеальных связях работа сил реакций каждой кинематической пары должна равняться нулю при любом возможном перемещении, т.е. должно быть
A R |
x R y R |
z M R |
|
X |
M R |
|
M R |
|
Z |
0. |
(4.10) Здесь |
x, y, z |
– малые |
|
X |
Y |
Z |
0 X |
|
0Y |
Y |
0Z |
|
|
|
|
|
||
возможные перемещения вдоль осей координат, |
а X , Y , Z – малые повороты вокруг этих осей. |
|||||||||||||
Вращательная пара (см. рис.4.1) допускает только малый поворот звена 2 (цапфы) относительно звена 1
(втулки) вокруг оси 0z. Тогда из (4.10) имеем A M0RZ Z 0. Поскольку при повороте Z 0, имеем
M0RZ 0. Таким образом, одна из шести компонент реакций вращательной пары определилась, и число неизвестных уменьшилось на единицу – степень подвижности пары. В поступательной паре возможное перемещение ползуна относительно направляющей направлено вдоль оси х. Поэтому здесь A RX x 0,
и поскольку x 0, имеем RX 0 , что также определяет одну из неизвестных компонент реакций. В
цилиндрической паре отличны от нуля возможные перемещения Z (поворот вокруг продольной оси 0z) и
z (перемещение вдоль этой оси), |
так что здесь |
A R |
z M R |
|
Z |
0. |
В |
силу независимости |
|
|
Z |
0Z |
|
|
|
|
|
возможных перемещений z и Z |
это условие должно выполняться как при z 0, |
Z 0, так и при |
||||||
z 0, Z 0. Это приводит к выводу о том, что RZ и M0RZ должны равняться нулю, что определяет для двухподвижной цилиндрической пары две компоненты реакций. Аналогично можно показать, что в любой s–
подвижной паре условие идеальности приводит к появлению s |
дополнительных |
соотношений для |
|
5 |
|
компонент реакций. В результате для механизма в целом появляется |
spS условий, |
что делает задачу |
|
S 1 |
|
силового расчета разрешимой. Часто в этом случае говорят о статической определимости механизма.
Билет №2 Уравнения кинетостатики.Уравнения (4.7) удобно представить в другой форме. Введем в
рассмотрение |
силы |
инерции |
материальных |
точек |
s–го |
звена |
Φsi msiwsi , |
(i 1, ... ks , s 1, ... N 1), |
(4.11) где msi – масса i–й материальной точки; wsi |
– ее |
|||
ускорение. Напомним, что «сила инерции» Φsi лишь условно называется силой; в действительности это |
||||||
мера движения материальной точки, подобная, например, количеству движения. Вводя силы инерции,
можно преобразовать левые части уравнений (4.7); учитывая, что KS msi vsi, Ls0 |
rsi msi vsi , |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
i |
получаем |
dKS |
|
d |
msi vsi |
msi wsi Φsi ΦS , |
(4.12) |
|
|||||||||
|
|
dt |
|
|||||||||||||
|
|
|
|
|
|
dt |
|
|
i |
i |
|
i |
|
|
||
|
dLS 0 |
|
d |
|
rsi msi vsi (vsi msi vsi |
rsi msiwsi ) rsi Φsi M0( S ). (4.13) |
|
|||||||||
|
dt |
|
|
|
||||||||||||
|
|
|
dt |
|
i |
|
|
|
i |
|
|
|
i |
|
||
Здесь Φ |
S |
– главный вектор сил инерции s–го звена, а M( ) |
– их главный момент относительно некоторой |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0S |
|
|
||
произвольно выбранной точки О. В правых частях уравнений (4.7) выделим активные силы PSK и реакции |
||||||||||||||||
кинематических пар RSK : |
|
|
|
|
|
|||||||||||
FSK (PSK RSK ) PS RS , |
|
|
|
|
||||||||||||
|
K |
|
|
|
K |
|
|
|
|
|
|
(4.14) где PS и RS – главные векторы активных сил и |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
rSK FSK rSK (PSK RSK ) M0( PS) M(0RS) , |
|
|
||||||||||||||
|
K |
|
|
|
|
|
|
|
K |
|
|
|
|
|
|
|
реакций связей, действующих на s–е звено, M0(PS) и M0(RS) – |
их главные моменты относительно точки О. |
|||||||||||||||
Подставив (4.14) в (4.7), получим уравнения движения в следующей форме: |
|
|||||||||||||||
P R |
S |
Φ |
S |
0; |
M(P) M(R) M( ) |
0. (s 1,..., N) . (4.15) Уравнения движения получили форму |
||||||||||
|
S |
|
|
|
|
|
|
|
0S |
0S |
0S |
|
|
|
||
уравнений равновесия. Можно сказать, исходя из этой формы, что активные силы, действующие на каждое из подвижных звеньев механизма, реакции связей и силы инерции звена образуют уравновешенную системую. В действительности силы инерции силами не являются; они являются мерами движения. Соответственно уравнения (4.15) являются уравнениями движения. Чтобы подчеркнуть это обстоятельство, их называют уравнениями кинетостатики, а модель силового расчета механизма, основанную на их применении, –
кинетостатической моделью.

Билет №3-4 Определение главного вектора и главного момента сил инерции (общий случай; поступательное движение; вращение вокруг неподвижной оси; плоское движение) Уравнения (4.7)
удобно представить в другой форме. Введем в рассмотрение силы инерции материальных точек s–го звена Φsi msiwsi , (i 1, ... ks , s 1, ... N 1), (4.11) где msi – масса i–й материальной точки; wsi – ее ускорение. Напомним, что «сила инерции» Φsi лишь условно называется силой; в действительности это мера движения материальной точки, подобная, например, количеству движения. Вводя силы инерции,
можно преобразовать левые части уравнений (4.7); |
учитывая, что |
KS msi vsi, Ls0 |
rsi msi vsi , |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
i |
получаем |
dKS |
|
d |
msi vsi msi wsi Φsi ΦS , |
(4.12) |
|
||||||||
|
|
dt |
|
|||||||||||
|
|
|
|
|
dt |
|
i |
i |
i |
|
|
|
||
|
dLS 0 |
|
d |
rsi |
msi vsi (vsi msi vsi rsi msiwsi ) rsi Φsi M0( S ). (4.13) |
|
||||||||
|
dt |
dt |
|
|||||||||||
|
|
i |
|
|
|
i |
|
i |
|
|
||||
Здесь Φ |
– главный вектор сил инерции s–го звена, а M( ) |
– их главный момент относительно некоторой |
|||
S |
|
0S |
|
|
|
произвольно выбранной точки О. В правых частях уравнений (4.7) выделим активные силы PSK и реакции |
|||||
кинематических пар RSK : |
|
|
|
||
FSK (PSK RSK ) PS RS , |
|
|
|
||
K |
K |
(4.14) где PS |
и RS – главные векторы активных сил |
||
rSK FSK rSK (PSK RSK ) M0( PS) M(0RS) , |
|||||
|
|
|
|||
K |
K |
|
|
|
|
и реакций связей, действующих на s–е звено, M(0PS) и M(0RS) – их главные моменты относительно точки О. Подставив (4.14) в (4.7), получим уравнения движения в следующей форме:
PS RS ΦS 0; M(0PS) M(0RS) M(0S ) 0. (s 1,..., N) . (4.15) Уравнения движения получили форму
уравнений равновесия. Можно сказать, исходя из этой формы, что активные силы, действующие на каждое из подвижных звеньев механизма, реакции связей и силы инерции звена образуют уравновешенную систему. Следует только помнить об условности такой формулировки; в действительности силы инерции силами не являются; они являются мерами движения. Соответственно уравнения (4.15) являются уравнениями движения, а не уравнениями равновесия. Чтобы подчеркнуть это обстоятельство, их называют уравнениями кинетостатики, а модель силового расчета механизма, основанную на их применении, – кинетостатической моделью. Для составления уравнений в форме (4.15) необходимо уметь определять главные векторы и главные моменты сил инерции звена при заданном законе его движения. Пусть некоторая
точка О (рис.4.2) выбрана за полюс звена, rc – |
вектор, определяющий положение его центра масс С. Если |
|||||||||
известны ускорение полюса w0 , вектор угловой скорости звена ω и вектор его углового ускорения ε (они |
||||||||||
определяются при кинематическом анализе механизма), то для главного вектора сил инерции |
Φ и для |
|||||||||
главного момента их M( ) |
относительно точки О справедливы следующие выражения: |
|
||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
mwC m(w0 |
rC rC ), |
(4.16) |
||||||
|
|
M(Φ) |
(I ε ω I |
ω mr w |
0 |
). (4.17) |
|
|||
|
|
0 |
|
0 |
0 |
C |
|
|
|
|
z |
|
Здесь m – масса звена, I0 – тензор инерции в точке О. Если ввести |
||||||||
|
|
систему координат 0хyz, связанную со звеном, то тензор I0 можно |
||||||||
|
C |
задавать матрицей моментов инерции |
|
|
||||||
|
|
|
J XY |
J XZ |
|
|
|
|
||
w0 |
|
|
J X |
|
|
|
|
|||
r |
|
J XY |
|
JYZ |
|
|
|
|
|
|
|
C |
JY |
|
|
|
|
||||
0 |
y |
I0 |
, |
(4.18) |
|
|||||
|
|
|
J XZ |
JYZ |
JZ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
x |
|
|
|
|
|
|
|
|
|
|
Рис. 4.2 |
|
где JX, JY, JZ – осевые, а JXY, JYZ, JXZ – центробежные моменты |
||||||||
|
инерции. Найдем выражения |
для |
|
проекций на оси |
главного |
|||||
|
|
|
||||||||
вектора и главного момента сил инерции в некоторых частных случаях.
a). Поступательное движение звена. Учитывая, что ω=0, ε=0, найдем M(0Ф) :
|
i |
j |
k |
|
|
|
M(Ф) m |
x |
y |
z |
c |
|
|
0 |
c |
c |
|
|
|
|
|
wox |
woy |
woz |
|
|
|
m i ycwoz zc woy j zcwoz xc woz k xcwoy yc wox |
. |
|||||
Здесь хс, yc, zc – координаты центра масс. Тогда:
Фx m wox ,Фy m woy ,Фz m woz , M0(Фx ) m yc woz zc woy ,
(4.19)
M0(Фy ) m zc woz xc woz ,
M0(Фy ) m xc woy yc wox .
б). Вращение вокруг неподвижной оси (рис.4.3).
ωх = ωy = 0; ωz = ω; εx = εy = 0; εz = ε; w0 = 0.
Для определения главного вектора сил инерции найдем векторные произведения:
|
i |
j |
k |
|
|
|
|
|
|
ε rc |
0 |
0 |
|
i ( yc ) j ( xc ) k (0) , |
|
||||
|
xc |
yc |
zc |
|
|
|
|
|
|
|
|
|
|
i |
|
j |
k |
|
|
|
|
|
|
|
|
|
|||
ω (ω r ) |
|
0 |
|
0 |
|
i ( 2 x ) j ( 2 |
y ) k (0) . |
||
|
c |
|
|
|
|
|
|
c |
c |
|
|
|
yc |
xc |
0 |
|
|
||
Отсюда найдем проекции главного вектора сил инерции:
Ф m (x 2 |
y ), |
|
|
|
|
x |
c |
c |
|
|
|
Фy m ( yc 2 |
xc ), (4.20) |
|
|
|
|
Фz |
0. |
|
|
|
|
Для определения главного момента сил инерции найдем I0 ε и ω I0ω : |
|||||
|
|
|
Ixz |
|
|
|
|
|
I yz |
|
|
|
|
Ioε |
|
, |
|
|
|
|
Iz |
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
j |
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
i ( 2 I yz ) j ( 2 Ixz ) k 0. |
Z |
||||
ω Ioω |
|
0 |
|
0 |
|
|
|
|
|||||
|
|
I |
xz |
|
I |
yz |
|
I |
|
|
|
||
|
|
|
|
|
|
|
z |
|
|
|
|
||
Подставляя найденные соотношения в выражение (4.17), найдем главный |
|
||||||||||||
момент сил инерции в проекциях на координатные оси: |
|
||||||||||||
M ox(Ф) I yz 2 Ixz , |
|
|
|
|
|
|
|||||||
M oy(Ф) Ixz 2 I yz , |
|
(4.21) |
|
|
|
|
|||||||
M |
(Ф) I |
. |
|
|
|
|
|
|
|
|
x |
||
|
|
|
|
|
|
|
|
|
|||||
|
oz |
z |
|
|
|
|
|
|
|
|
|
|
|
 C
C
rc y
Рис. 4.3
в). Плоское движение звена. Выберем в качестве полюса центр масс звена С. Введем систему координат Сxyz так, чтобы ось Сz была перпендикулярна плоскости движения звена. В осях Cxyz построим тензор инерции IС:
|
J C |
J C |
J C |
|
|
X |
XY |
XZ |
|
IC |
J XYC |
JYC |
JYZC |
. |
|
J C |
J C |
J C |
|
|
|
|||
|
XZ |
YZ |
Z |
|
Тогда получим следующие выражения для главного вектора и главного момента сил инерции:
Ф mw |
M ox(Ф) I yz (c) 2 I xz(c) |
|||||||
x |
cx |
|
|
|
|
|
|
|
Ф |
y |
mw |
, M |
oy |
(Ф) I |
(c) 2 |
I |
(c) (4.22) |
|
cy |
|
|
xz |
|
yz |
||
Фz mwcz |
M oz (Ф) Iz |
|
|
|||||
Билет №5-6. Силовой расчет плоских рычажных механизмов (одноподвижных и многоподвижных). Примеры. Для механизмов с идеальными связями уравнения кинетостатики представляют собой систему линейных алгебраических уравнений, обладающую единственным решением, если избыточные связи в системе отсутствуют, а рассматриваемое положение механизма не является особым. Для сложных механизмов, содержащих большое число подвижных звеньев, система уравнений кинетостатики имеет высокий порядок (для N–1 подвижных звеньев – 6(ּN–1) уравнений). Ее решение существенно облегчается тем, что она может быть разделена на несколько независимых систем, каждая из которых содержит обобщенную движущую силу и реакции кинематических пар, действующие на звенья одной структурной группы. Действительно, для каждой структурной группы, не содержащей избыточных связей, справедлива структурная формула
5 |
|
wG 6NG (6 |
s) pSG , (4.23) где wG – число степеней подвижности группы, NG – число подвижных |
S 1 |
|
звеньев группы, pSG – число s-подвижных кинематических пар в группе. С другой стороны, как было показано выше, сумма
5 |
|
nu wG (6 |
s) pSG (4.24) представляет собой число неизвестных движущих сил и реакций в |
S 1 |
|
идеальных связях, подлежащих определению. Сравнивая выражения (4.23) и (4.24), замечаем, что nu=6NG, т.е. число неизвестных сил равно числу уравнений кинетостатики. Таким образом, уравнения кинетостатики могут решаться последовательно для каждой структурной группы. Особенности расчета плоского механизма. В плоском механизме, выделяя последовательно плоские структурные группы, можно для
каждой из них определить отдельно компоненты реакций, лежащих в плоскости движения х0y (Rx, Ry, M0RZ ), и обобщенные движущие силы. Часто из-за наличия избыточных связей определение всех реакций второй группы (Rz, M0RX , M0RY ) становится невозможным; в этом случае приходится ограничиваться определением
только реакций освобождающих связей.
а) На рис.4.4 показан плоский механизм с одной степенью подвижности, состоящий из двух структурных
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
групп: |
однозвенной |
одноподвижной |
||
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
группы |
(звено 1) и |
группы Ассура |
|||
|
A |
2 |
|
|
|
|
|
|
|
|
|
|
типа ВВП (звенья 2 и 3). |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
Ф2 |
|
|
|
|
|
На рисунке нанесены активные силы: |
||||||
Q |
1 |
|
S2 |
|
|
|
|
|
|
|
|
|
заданные ( P, G1, G2, G3) и |
||||||
|
|
|
( Ф ) |
|
|
|
|
|
|
|
|
|
подлежащие |
определению |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(движущий момент Q), а также силы |
|||||
O |
|
|
M S 2 |
|
|
|
B |
3 |
|
|
|||||||||
|
x |
|
|
|
Р |
Ф3 |
инерции, |
лежащие |
в плоскости |
||||||||||
|
|
|
|
G2 |
|
|
|
||||||||||||
|
|
G1 |
|
|
|
|
|
|
|
движения (Φ2 ,Φ3) , и проекции |
|||||||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
моментов сил инерции на ось z, |
||||||
|
|
|
|
|
|
|
|
|
|
G3 |
|
|
перпендикулярную |
плоскости |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
R12yРис. 4.4 |
a) |
|
|
|
|
|
|
|
б) |
|
|
||||
|
|
|
A |
R12x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
S2 |
Ф2 |
|
|
|
|
|
|
|
R03 |
|
||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
R03 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
R23y |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
M S( Ф2 |
) |
|
|
|
B |
3 |
Р |
Ф3 |
3 |
|
B |
R23x Р |
Ф3 |
||
|
|
|
|
|
G2 |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
M 03( R ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( R ) |
|
|
|
|||
|
|
|
|
|
|
|
|
|
G3 |
|
|
M03 |
G3 |
|
|||||
Рис. 4.5
движения ( M S(Ф2 ) ). Силовой расчет начинается с последней группы, т.е. группы Ассура ВВП (рис.4.5, а). На
рисунке показаны компоненты реакций, лежащие в плоскости движения. Во вращательных парах (например, в шарнире А) возникают реакции с компонентами Rx и Ry, а в поступательных парах (например, в
поступательной паре В) – нормальная реакция R и момент M0(Rz ) . В шарнире А со стороны звена 1 на звено 2
действуют компоненты реакции R12x и R12y, а в поступательной паре В стороны стойки 0 на ползун 3 действуют реакция R03 и момент M03(R) .
Реакция в шарнире В является внутренней для группы, поэтому она на не показана. Для того, чтобы включить в рассмотрение реакцию в В, надо отбросить либо звено 2, либо звено 3. На рис.4.5, б оставлено (ползун); к указанным ранее силам добавлены компоненты реакции R23x действующей со стороны звена 2 на звено 3. Таким образом, в группе плоскости, перпендикулярной оси z, всего 6 неизвестных: R12x, R12y, R23x,
M03(R) . Для звена 3 из условия равенства нулю суммы моментов всех сил относительно оси Bz (т.е. оси z, проходящей через точку B) следует:
M03(R) 0 .
|
|
R21y |
|
со |
|
|
|
|
|
y |
A |
|
рисунке |
|
|
|
шарнире |
||
R01y |
|
|
||
|
R21x звено |
3 |
||
Q |
1 |
|
и R23y, |
|
|
ВВП |
в |
||
|
|
|
||
O |
R01x x |
R23y, R03, |
||
|
|
|
||
G1
Рис. 4.6
Сумма моментов всех сил, действующих на звенья 2 и 3, относительно оси Аz:
(Р + Ф3)(yA – yB) – (R03 – G3)(xA – xB) + Ф2x(yA – yS2) – (Ф2y – G2)(xA – xS2) + M S(Ф2 ) = 0,
где Ф2х и Ф2y – проекции главного вектора сил инерции второго звена, хА, yA, xB, yB, xS2, yS2 – координаты точек соответственно А, В, S2. Отсюда можно найти реакцию R03. После этого легко определяются остальные
неизвестные. Уравнения для ползуна 3: R23x + P + Ф3 = 0, R03 + R23y – G3 = 0. Уравнения для звеньев 2 и 3:R12x + Ф2x + P + Ф3 = 0;
R12y + Ф2y – G2 + R03 – G3 = 0. После определения всех реакций в группе ВВП переходят к расчету первой структурной группы (рис.4.6). R12x=–R21x, R12y=–R21y. Остаются три неизвестные: компоненты реакции R01x, R01y в шарнире 0 и движущий момент Q. Для кривошипа можно составить три уравнения кинетостатики. Если угловая скорость вращения кривошипа постоянна и центр масс находится на оси вращения О
R21x + R01x = 0, R21y + R01y – G1 = 0, R21x(y0 – yA) – R21y(x0 – xA) + Q = 0.
Последовательность силового расчета проиллюстрирована на схеме рис.4.7.
Предварительно определяются силы инерции Φ2 ,Φ3, MS(Ф2 ) . Потом решаются 6 уравнений для звеньев 2 и 3
группы ВВП, входящей во второй слой, находятся реакции R12x, R12y, R23x, R23y, R03, M03(R) . Затем решаются три уравнения для звена 1, являющегося группой первого слоя. Реакции R21x и R21y рассматриваются как известные (R12x = – R21x, R12y = – R21y). Определяются реакции R01x, R01y и движущий момент Q.
|
Ф2 Ф3 |
( Ф ) |
G1 |
|
|||
|
M S 2 |
|
|
||||
P |
|
|
|
R12X = – R21X |
|
R01X, R01Y, Q |
|
|
|
|
|
||||
|
|
|
|
|
Звено 1 |
||
G2, G3 |
|
Группа BBП |
|
|
|
||
|
|
|
|
|
|||
|
(звенья 2,3) |
|
|
(кривошип) |
|
||
|
|
R12Y = – R21Y |
|
||||
|
|
|
|
|
|
||
|
|
|
|
|
|
||
|
|
|
|
|
|
||
|
|
R03, M03( R ) , R23X, R23Y |
|
|
|||
Рис.4.7

Рис. 4.8
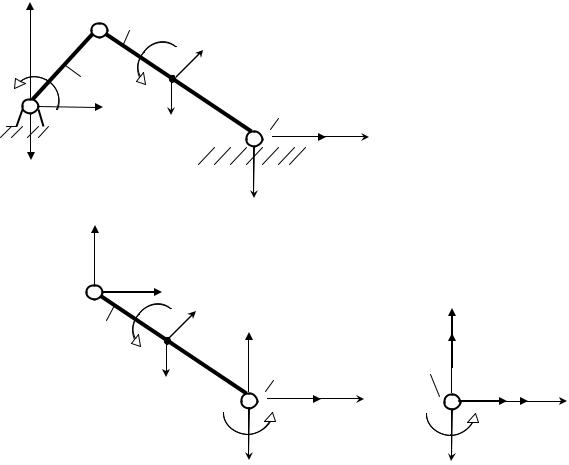
6б) Механизм с тремя степенями подвижности (рис.4.8). Данный механизм состоит из трех одноподвижных групп: двух однозвенных (звенья 1 и 5) и одной трехзвенной (звенья 2, 3, 4). Определив силы инерции и моменты сил инерции звеньев, а также задав значения активных сил P3X и P3Y, приложенных в точке С3 звена 3, и момента Мw, приступаем к силовому расчету последней структурной группы АВСD. Для плоской системы сил, действующих на три звена этой группы, составляем 9 уравнений кинетостатики, из
которых определяем обобщенную движущую силу Q2 и 8 реакций (R12X, R12Y, R23X, R23Y, R34X, R34Y, R54X, R54Y). Затем приступаем к расчету однозвенных групп первого слоя ОА и ЕD. При этом силы R21X = – R12X, R21Y = –
R12Y, R45X = – R54X, R45Y = – R54Y рассматриваются уже как известные, найденные на предыдущем этапе. Из уравнений кинетостатики для звена ОА определяем R01X, R01Y,обобщенную движущую силу Q1; из уравнений, составленных для звена ЕD,определяем R05X, R05Y,обобщенную движущую силу Q3.
На рис.4.9 схематично представлен алгоритм силового расчета этого механизма. Для каждой группы указаны заданные («входные») силы и силы, найденные при силовом расчете.
Силовой расчет по кинетостатической модели может производиться не только решением уравнений
кинетостатики, составленных для каждого звена в отдельности, но и с помощью других методов. Рассмотрим,
Рис. 4.9
каким образом можно провести расчет трехзвенной группы АВСD, показанной на рис.4.8, методом размыкания кинематической цепи. Разомкнем кинематическую цепь в шарнире D и введем реакции освобождающих связей R54X и R54Y. Составим уравнения равновесия моментов всех активных сил, всех сил инерции и введенных реакций связей относительно осей шарниров А, В, С. Получим три уравнения:
M A ( 2 ) M A (G2 ) M 2(C ) M A (P3 X ) M A (P3Y ) M w M A ( 3 ) M A (G3 )
M3(C ) M A ( 4 ) M A (G4 ) M 4(C ) M A (R54 X ) M A (R54Y ) 0,
M B (P3 X ) M B (P3Y ) M w M B ( 3 ) M B (G3 )
M3(C ) M B ( 4 ) M B (G4 ) M 4(C ) M B (R54 X ) M B (R54Y ) 0,
MC ( 4 ) MC (G4 ) M 4(C ) MC (R54 X ) MC (R54Y ) Q2 0.
Из этих уравнений определяются три неизвестные величины: R54X, R54Y и Q2. После этого определение реакций в шарнирах А, В, С не вызывает затруднений; их можно найти, например, из уравнений проекций на оси х и y сил, действующих на звенья 2, 3, 4. Решение уравнений кинетостатики усложняется, если в механизме имеются избыточные связи. В этом случае система становится статически неопределимой.