

33.Переходный процесс эл. привода с линейной хар-ой при одно- и многоступенчатом пуске при ω0=const, MC=const.
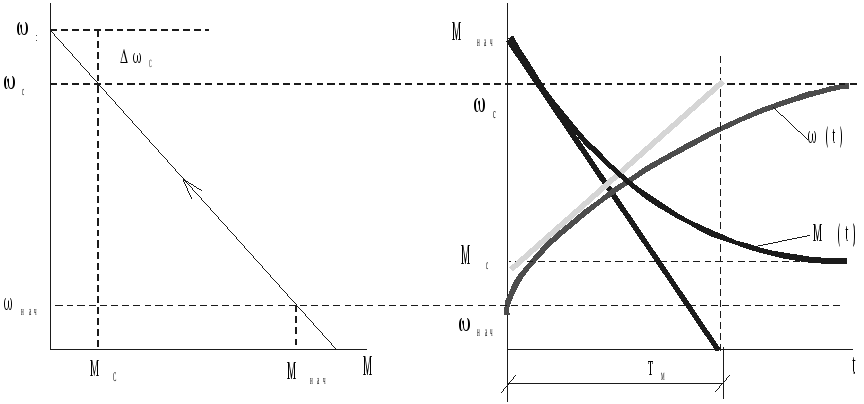
При одноступенчатом пуске переходный процесс описывается уравнениями
![]() ;
;
![]()
е сли
увеличение скорости происходит не от
сли
увеличение скорости происходит не от![]() =0,
а от какого-то начального установившегося
значения, как показано на графиках.
=0,
а от какого-то начального установившегося
значения, как показано на графиках.
Закон изменения ускорения
![]() , где
, где
![]()
Уменьшение ε по мере увеличения скорости объясняется непрерывным уменьшением динамического момента Мдин. Если разгон идет из
Законы
изменения
![]() и
М при разгоне на любой ступени определяются
согласно ранее приведенным выражениям.
и
М при разгоне на любой ступени определяются
согласно ранее приведенным выражениям.
Для примера рассчитаем переходный процесс на первой и второй ступенях. Сначала для первой ступени
1.
 3.
3.![]()
2.
![]() 4.
4.![]()
Значения
![]() н1
и
н1
и
![]() с1
находятся из графика, где изображена
пусковая диаграмма при М=Мн
и М=Мс
. Задаваясь
временем t
от 0 до t1
, рассчитываются законы изменения
с1
находятся из графика, где изображена
пусковая диаграмма при М=Мн
и М=Мс
. Задаваясь
временем t
от 0 до t1
, рассчитываются законы изменения
![]() и
М на первой ступени и строятся кривые
и
М на первой ступени и строятся кривые
![]() =f(t)
и M=f(t).
=f(t)
и M=f(t).
Далее делается расчет процесса на второй ступени
1.
 3.
3.![]()
2.
![]() 4.
4.![]()
Значения
![]() с2
и
с2
и
![]() к1
находятся из пусковой диаграммы.
Задаваясь временем t
от 0 до t2,
рассчитываются и строятся кривые
к1
находятся из пусковой диаграммы.
Задаваясь временем t
от 0 до t2,
рассчитываются и строятся кривые
![]() =f(t)
и M=f(t)
для второй ступени и т.д. Время разгона
на естественной характеристике до
=f(t)
и M=f(t)
для второй ступени и т.д. Время разгона
на естественной характеристике до
![]() =
=![]() н=
н=![]() с
принимается равным tн=(3-4)Tм,
где в Тм
вместо
с
принимается равным tн=(3-4)Tм,
где в Тм
вместо
![]() нх
подставляется
нх
подставляется
![]() н.
н.
34. Переходные процессы эл. привода с линейной хар-ой при ω0=const, MC=const в тормозных режимах.
Рассмотрим сначала реверс, который заключается в торможении противовключением с дальнейшим изменением направления вращения и разгоне в противоположную сторону.
Если
реверс осуществляется при активном
моменте сопротивления Мс=const,
переходный процесс описывается
уравнениями, приведенными ранее для
двигательного режима, с той разницей,
что в выражениях для ω
и
М нужно поставить знак минус перед ωс
и перед Мнач
![]()
![]()
Н а
графике с механическими характеристиками
показан переход из двигательного режима
в режим противовключения и построены
кривые переходного процесса. Двигатель
при переводе его
а
графике с механическими характеристиками
показан переход из двигательного режима
в режим противовключения и построены
кривые переходного процесса. Двигатель
при переводе его в
режим противовключения тормозится по
линии ВС. Затем, если его не отключить
от сети, будет разгоняться в обратном
направлении по линии
в
режим противовключения тормозится по
линии ВС. Затем, если его не отключить
от сети, будет разгоняться в обратном
направлении по линии
Дин.
торможения и вертикали Мc
=const.
В случае активного Мс
точка “B”,
соответствующая ωс2,
относится к случаю, когда этот момент
в начале процесса является тормозным,
что действует при подъеме груза, а т.
“c”
с установившейся скоростью ωс1-
к случаю, когда этот момент является
движущим при спуске груза (рис.а). В
случае торможения при подъеме груза
под действием Мс
и тормозного момента двигателя привод
вначале будет тормозится и остановится,
т.к. момент двигателя станет =0, но т.к.
Мс
является активным и будет продолжать
действовать в том же направлении, под
его действием система будет вращаться
в обратную сторону. При этом Мс
из момента сопротивления (тормозного)
превратится в движущий, а тормозной
момент двигателя изменит свой знак и
будет продолжать действовать как
тормозной. Установившаяся скорость
наступит при равенстве момента двигателя
и Мс
т.е. в т. В. Кривые переходного процесса
этого случая изображены на рис. “б”.
Время торможения до ω=0
, т.е. до остановки
![]()
Если
активный момент сопротивления в начале
торможения был движущим (торможение
при спуске груза ), то в начале торможения
тормозной момент (отрезок ED
на рис.”а”) больше движущего статического
момента и есть замедление, сопровождающееся
уменьшением тормозного момента двигателя.
При скорости ωс1
M=Mc,
замедление прекращается и наступает
установив-шийся режим тормозного спуска
груза со скоростью ωс1.
В этом
случае затормозить систему до остановки
путем динамического торможения нельзя
(рис.”в”). При реактивном моменте
сопротивления динамическое торможение
происходит так же, как  и
при подъеме груза. Разница лишь в том,
что
и
при подъеме груза. Разница лишь в том,
что
36. Переходный процесс эл. привода с линейной хар-ой при ω0=f(t), MC=const в тормозных режимах.
При пуске электропривода включением его в сеть на полное напряжение U=const и f1=const переходные процессы протекают при скачке напряжения, или как говорят, скачке управляющего воздействия, когда 0=const. Для ограничения бросков тока и момента в якорную или роторную цепь двигателя приходится вводить добавочное сопротивление. Переходные процессы при этом будут далеки от оптимальных. При питании двигателя от преобразователя напряжения или частоты ( в замкнутых системах) можно получить переходные процессы, близкие к оптимальным, путем плавного изменения управляющего воздействия. Они протекают в этом случае при ω0=f(t). При этом ограничивается темп нарастания управляющего воздействия путем ограничения ускорения ω 0 Т.о. переходные процессы протекают в этом случае при U=var или f=var.
Проанализируем переходные процессы при линейном изменении управляющего воздействия ω 0 во времени, т.е. при линейном изменении U или f1, при котором ω 0= ω 0 нач+εt.
Исходными дифференциальными уравнениями для получения расчетных соотношений являются ранее полученные уравнения
![]()

При
соотношении постоянных времени
![]() величиной Тэ
можно пренебречь и уравнение, определяющее
закон изменения ω
будет
иметь вид
величиной Тэ
можно пренебречь и уравнение, определяющее
закон изменения ω
будет
иметь вид
![]()
Правая
часть этого уравнения – частное решение,
соответствующее установившемуся режиму,
когда все свободные составляющие
затухнут. Для этого режима ω
=a+bt,
где а и b
– неопределенные коэффициенты , находимые
из начальных условий. Имея в виду, что
![]() ,
получим приt=0
,
получим приt=0
![]()
![]() Отсюда
Отсюда
![]()
Общее решение дифференциального уравнения относительно ω
37.Переходный процесс электропривода с двигателем независимого возбуждения при изменении магнитного потока
Обычно
ДНВ работает при Ф=Фн
если U=const
или U=var.
Необходимость ослабления потока
 возникает
когда требуется получить скорость,
превышающую основную (согласно
требованиям технологического процесса
). Если бы поток изменялся мгновенно, то
в начальный момент времени имел бы
место бросок тока и момента, как показано
на рисунках ω=f(Ia)
и ω =f(M)
пунктиром . В действительности Ф
изменяется
во времени. Поэтому ток якоря и момент
двигателя будут изменяться по т.н.
динамическим характеристикам (кривая1).
Для расчета переходного процесса
пренебрегаем индуктивностью якоря LЯ
т.к. она мала по сравнению с индуктивностью
LВ
обмотки возбуждения. Бросок тока и
момента будет тем больше, чем быстрее
темп изменения Ф. Для получения расчетного
выражения воспользуемся уравнением
равновесия ЭДС в якорной цепи и уравнением
момента.
возникает
когда требуется получить скорость,
превышающую основную (согласно
требованиям технологического процесса
). Если бы поток изменялся мгновенно, то
в начальный момент времени имел бы
место бросок тока и момента, как показано
на рисунках ω=f(Ia)
и ω =f(M)
пунктиром . В действительности Ф
изменяется
во времени. Поэтому ток якоря и момент
двигателя будут изменяться по т.н.
динамическим характеристикам (кривая1).
Для расчета переходного процесса
пренебрегаем индуктивностью якоря LЯ
т.к. она мала по сравнению с индуктивностью
LВ
обмотки возбуждения. Бросок тока и
момента будет тем больше, чем быстрее
темп изменения Ф. Для получения расчетного
выражения воспользуемся уравнением
равновесия ЭДС в якорной цепи и уравнением
момента.

![]()
Выразим коэффициенты “k” через номинальные параметры. Коэффициенты ЭДС
![]() ;
;
![]()
1)
 ; 2)
; 2)

Определив
из второго уравнения IЯ
и подставив в первое, а также разделив
полученное выражение на
![]() , получим
, получим или в относительных единицах
или в относительных единицах
3)
![]() , где
, где ;
;
Это
уравнение нелинейное и решить его
непосредственно нельзя, т.к. φ =f(t).
При небольших  пределах
изменения Фможно
считать, что Физменяется
по линейному закону, как показано на
графике кривой намагничивания. Линейное
изменение потока имеет место в случае,
если
пределах
изменения Фможно
считать, что Физменяется
по линейному закону, как показано на
графике кривой намагничивания. Линейное
изменение потока имеет место в случае,
если
![]() , т.е. когда цепь машины не насыщена
(здесь допускается некоторая погрешность).
Закон изменения тока возбуждения при
ненасыщенной магнитной цепи можно найти
из уравнения равновесия ЭДС для цепи
возбуждения
, т.е. когда цепь машины не насыщена
(здесь допускается некоторая погрешность).
Закон изменения тока возбуждения при
ненасыщенной магнитной цепи можно найти
из уравнения равновесия ЭДС для цепи
возбуждения![]()
25. Математическое описание процессов преобр.энергии в АД
С хема
включения АД с фазным ротором и
соответствующая ей схема двухфазной
модели изображены на рисунках.
хема
включения АД с фазным ротором и
соответствующая ей схема двухфазной
модели изображены на рисунках.
Математическое описание процессов эл.механического преобразования энергии в осях и можно получить из ранее приведенных уравнений положив в них U2=0 и к=0.
![]()
![]()
![]()
![]()
![]() ,
где
,
где
![]()
Эти
уравнения используются для анализа
динамических свойств асинхронного ЭМП.
В установившемся симметричном режиме
работы двигателя переменные представляют
собой сдвинутые относительно друг от
друга по фазе синусоидальные величины,
изменяющиеся в осях ,
с частотой сети:
![]() .
.
Представим
эти переменные в виде вращающихся
векторов U1,
I1,
U1,
I1
и т.д. Т.к. переменные фазы
отстают от переменных фазы
на эл=90,
между ними очевидна связь:
![]() и .т.д. Учитывая это и имея ввиду, что
производная по времени от вектора,
неизменного по модулю и вращающегося
со скоростью0эл,
может быть получена умножением этого
вектора на j0эл,
т.е. например:
и .т.д. Учитывая это и имея ввиду, что
производная по времени от вектора,
неизменного по модулю и вращающегося
со скоростью0эл,
может быть получена умножением этого
вектора на j0эл,
т.е. например:
![]() ,
уравнения электрического равновесия
для фазы
статора и ротора можно представить в
виде:
,
уравнения электрического равновесия
для фазы
статора и ротора можно представить в
виде:
![]()
![]() ,
т.к.
,
т.к.
![]()
Для
анализа статических режимов преобразования
энергии выразим потокосцепления 1
и 2
через намагничивающий ток:
![]()
![]()
![]()
26. Естественные механическая и эл.Механическая характеристика ад.
Н аиболее
удобна для анализа работы АД Г-образная
схема замещения с намагничивающим
контуром, вынесенным на зажимы первичной
сети. Здесь
аиболее
удобна для анализа работы АД Г-образная
схема замещения с намагничивающим
контуром, вынесенным на зажимы первичной
сети. Здесь![]() .
Т.к.
.
Т.к.![]() -
мало, пренебрегаем им ,т.е. получаем
-
мало, пренебрегаем им ,т.е. получаем![]() .
.
Приняв
для главной цепи поправочный коэффициент
1,
получим схему замещения, в которой:
![]() ;
;![]() ;
;![]() ;
;![]() .
.
И спользуя
известные из курса эл.машин выражения
для электромагнитного момента:
спользуя
известные из курса эл.машин выражения
для электромагнитного момента:

и
критического момента:
 .
.
И поделив одно на другое получим после преобразований

прямой
линией, описываемой уравнением (в
пределах до МН): .
.
С ледует
иметь в виду, что формулы Клосса, в т.ч.
и упрощенная, достаточно точно описывают
механические характеристики АД с фазным
ротором. В к.з. АД, выпускаемых обычно с
относительно глубокими пазами в роторе,
либо с двойной клеткой ротора, имеется
в той или иной степени явление вытеснения
тока в стержнях ротора. Поэтому их
параметры непостоянны и механические
характеристики значительно отличаются
от от характеристик, рассчитанных по
формулам Клосса. Однако, эти формулы
благодаря своей простоте позволяют
выполнять многие расчеты и делать общие
заключения о свойствах и работе АД. В
тех же случаях, когда необходима большая
точность, должны использоваться
экспериментально снятые механические
характеристики. У некоторых к.з. двигателей
при малых скоростях механическая
характеристика имеет провал,(см. рис.),
вызванный влиянием высших гармоник
поля, с чем следует считаться при пуске
двигателя под нагрузкой.
ледует
иметь в виду, что формулы Клосса, в т.ч.
и упрощенная, достаточно точно описывают
механические характеристики АД с фазным
ротором. В к.з. АД, выпускаемых обычно с
относительно глубокими пазами в роторе,
либо с двойной клеткой ротора, имеется
в той или иной степени явление вытеснения
тока в стержнях ротора. Поэтому их
параметры непостоянны и механические
характеристики значительно отличаются
от от характеристик, рассчитанных по
формулам Клосса. Однако, эти формулы
благодаря своей простоте позволяют
выполнять многие расчеты и делать общие
заключения о свойствах и работе АД. В
тех же случаях, когда необходима большая
точность, должны использоваться
экспериментально снятые механические
характеристики. У некоторых к.з. двигателей
при малых скоростях механическая
характеристика имеет провал,(см. рис.),
вызванный влиянием высших гармоник
поля, с чем следует считаться при пуске
двигателя под нагрузкой.
Электромеханические
характеристики АД представляют собой
зависимости
![]() и
и![]() .
Т.к. ток ротора является основной
величиной для оценки режима работы
двигателя, рассмотрим графическую
зависимость
.
Т.к. ток ротора является основной
величиной для оценки режима работы
двигателя, рассмотрим графическую
зависимость![]() .
.
При
использовании формул
 или
или это не всегда удается сделать в виду
отсутствия данных о сопротивлениях
обмоток двигателя.
это не всегда удается сделать в виду
отсутствия данных о сопротивлениях
обмоток двигателя.
В связи с этим для получения эл.механической характеристики воспользуемся формулой Клосса и выражением эл.магнитного момента.
 ,
где
,
где
![]() ,
отсюда
,
отсюда