

10 Настройка контура позиционирования
Рассмотрим контур позиционирования, для которого контур скорости является внутренним:

Частотные характеристики этого контура имеют вид:
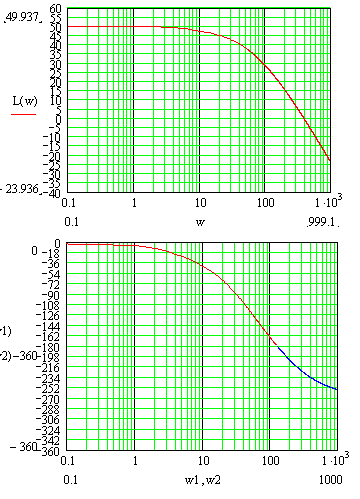
Как видно из графиков, система неустойчива, т.к. кривая ЛЧХ пересекает
-180 градусов раньше, чем кривая ЛАХ пересекает 0. Для достижения необходимых свойств САР нужно применить регулятор, который изменил бы наклон ЛАХ, не изменяя при этом Крс (коэффициент разомкнутой системы) и опустил кривую ЛЧХ. Таким регулятором может быть ИД-регулятор с передаточной функцией:
![]()
Техническая реализация:

Применив такой регулятор в контуре положения, получим следующие ЛАХ и ЛФХ:

Запасы устойчивости системы по модулю порядка 80 градусов, по фазе примерно 17 дб.
11 Структурная схема сар положения
Структурная схема САР положения будет выглядеть следующим образом:
 ,
,
12 Исследование и анализ переходных процессов
При отсутствии момента сопротивления и подаче задающего напряжения 10 В, соответствующего 5 градусам, переходный процесс имеет следующий вид:

Время переходного процесса 3 секунды, перерегулирование составляет 40%.
Ток якоря:

Пусковой ток порядка 20 А.
При появлении максимального момента сопротивления на 0.5 секунде, график переходного процесса примет вид:


Как видно из графиков, выходная координата отклоняется на 0.05 градуса, что соответствует заданным параметрам качества (<=0.5 градуса).
При ступенчатом периодическом изменении момента сопротивления от 0 до максимального (500 Нм) – при заданном режиме работы механизма, переходный процесс выглядит следующим образом:

Как видно, отклонение выходной координаты (угла поворота) в пределах заданной точности.
Ток якоря в этом случае:

13 Заключение
В результате проектирования был разработан автоматизированный электропривод следящей системы, обеспечивающей заданную точность слежения механизма при максимальной скорости задающего сигнала и максимальном моменте сопротивления. Исследованы и проанализированы переходные процессы при различных режимах работы системы.
Спроектированная система удовлетворяет всем поставленным требованиям.
Список литературы
Справочник по автоматизированному электроприводу / Под ред. В.А. Елисеева и А.В.Шинянского.-М.:Энергоатомиздат, 1983.
Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами: Учебное пособие для вузов.-Л.: Энергоиздат. Ленингр.отд-ние, 1982.
Зориктуев В.Ц. Автоматизированный электропривод металлорежущих станков: Учебное пособие. Уфа: УАИ, 1981.
Автоматизированный электропривод. Методические указания к курсовому проектированию по курсу «Автоматизированный электропривод», составители: Г.Н.Коуров, В.Ц. Зориктуев, УАИ, 1989 г.
Лист
Лист
№ докум
Изм.
Подпись
Дата