

1 Функциональная схема сар положения
Упрощённая функциональная схема САР положения приведена на рисунке:
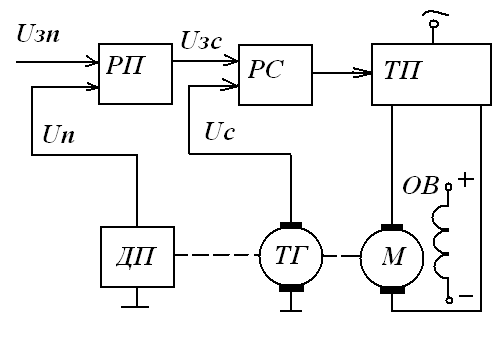
Рис. Функциональная схема САР
На рисунке:
РП – регулятор положения
ДП – датчик положения
ТГ – тахогенератор
РС – регулятор скорости
М – двигатель (механизм)
ТП – тиристорный преобразователь
ОВ – обмотка возбуждения
2 Выбор мощности электродвигателя
Выбор мощности электродвигателя произведём по методу эквивалентных величин.
По заданию, максимальное число позиционирований механизма 100 в час, а максимальный коэффициент продолжительности цикла равен 0,7. Тогда:
![]() -
минимальное время цикла.
-
минимальное время цикла.
Режим работы механизма повторно-кратковременный, нагрузочная диаграмма выглядит следующим образом:

Рис. Нагрузочная диаграмма механизма
Относительный коэффициент продолжительности цикла:
![]() ,
где
tp=tp1+tp2=2tp1,
tp+to=Tц
,
где
tp=tp1+tp2=2tp1,
tp+to=Tц
Откуда tp=25.2 с, tp1=tp2=12.6 c, to=36-25.2=10.8 c.
Mcmax=500 Hm, Mcmin примем равным 10% Mcmax, тогда эквивалентное значение мощности момента для стандартного значения относительной продолжительности цикла 0.6 вычисляются по следующим формулам:
![]()
![]()
Мощность на валу механизма вычислим как произведение момента на скорость вращения: Pмехmax=500*4=2 кВт, Pмехmin=50*4=200 Вт, тогда:
Рэмех=1.4 кВт
Мэмех=384 Нм
Далее, учитывая КПД редуктора 20%, получим Рэдв=7 кВт. Выбираемый электродвигатель должен удовлетворять следующим условиям:
Рном дв >= Рэ дв
Мном дв >= Мэ дв
3 Выбор и проверка электропривода
В качестве привода главного движения используется комплектный электропривод ПТ3Р-25/220-62/1500 , в состав которого входят следующие элементы:
-двигатель ПБСТ 62;
-тахогенератор встроенный ПТ –I;
-трансформатор ТТ 25;
-тиристорный преобразователь рода тока ПТТР-230-100.
Технические данные двигателя ПБСТ 62 приведены в таблице 1
Таблица 1-Технические данные двигателя ПБСТ-62
-
Наименование параметра
Значение
Частота вращения, n, об/мин
1500
Мощность номинальная Рн, Вт
7,2
Ток номинальный Iн , А
36
Момент номинальный Мн , Н м
46,8
КПД, %
90
Частота вращения мах nmax,, об/мин
3600
Маховый момент,

1,03
Кратность пускового тока In/Ip
4
Число пар полюсов, 2p
4
Сопротивление якоря, Rя, Ом
0,152
Сопротивление дополнительной обмотки , Rд, Ом
0,064
Рном дв >= Рэ дв 7.2 кВт >= 7 кВт
Передаточное
число редуктора
![]() ,
тогда момент сопротивления механизма,
приведённый к валу двигателя равенМэ
дв=10 Нм
,
тогда момент сопротивления механизма,
приведённый к валу двигателя равенМэ
дв=10 Нм
Мном дв >= Мэ дв 46.8 Нм >= 10 Нм
Значит, выбранный электропривод нам подходит.
4 Определение передаточной функции электродвигателя
Таблица 2-Технические данные трансформатора ТТ25
-
Наименование параметра
Значение
Мощность номинальная Рн, кВА
25
Напряжение первичной обмотки Uв.н, В
380
Напряжение вторичной обмотки Uн.н.,В
104/208/416
Мощность холостого хода Pх.х., Вт
200
Мощность короткого замыкания ,Pк.з., Вт
580
Ток номинальный Iн, А
38
Напряжение короткого замыкания Uк, %
10
Ток холостого хода Iх.х., А
0,15*Iн
Двигатель постоянного тока при управлении изменением напряжения якоря представляют в виде следующей системы:

Рис. Структурная схема двигателя
Постоянную времени якорной цепи Тя определяют по следующей формуле:
![]() , (1)
, (1)
где Lя.ц – индуктивность якорной цепи;
Rя.ц – сопротивление якорной цепи.
Индуктивность якорной цепи вычисляют по формуле:
![]() , (2)
, (2)
где Lтр – приведенная индуктивность трансформатора:
Lя.д.- индуктивность якоря двигателя
Приведенную индуктивность обмотки трансформатора определяют по формуле:
![]() , (3)
, (3)
где Zтр – полное приведенное сопротивление обмоток трансформатора;
Rтр – приведенное активное сопротивление трансформатора.
Полное приведенное сопротивление обмоток трансформатора вычисляют по формуле:
![]() , (4)
, (4)
где Uк – напряжение короткого замыкания;
Pн – номинальная мощность трансформатора;
Uн – номинальное напряжение вторичной обмотки.
Подставив численные значения, получим:
![]() Ом
Ом
Приведенное активное сопротивление трансформатора определяют по формуле:
 , (5)
, (5)
где Pк.з.- потери при коротком замыкании.
Подставив значения в данную формулу, получим следующее значение:
![]() Ом
Ом
Подставив полученные значения в формулу (3), получим значение приведенной индуктивности обмотки трансформатора
![]()
Приведенную индуктивность трансформатора определяют по формуле:
![]() Гн (6)
Гн (6)
Индуктивность якоря двигателя определяют по формуле:
![]() мГн, (7)
мГн, (7)
![]() (8)
(8)
Полное сопротивление якорной цепи вычисляют по формуле:
![]() (9)
(9)
Сопротивление якоря двигателя:
![]() , (10)
, (10)
где Rя – сопротивление якорной обмотки;
Rд.п – сопротивление дополнительной обмотки;
Rк.о. – сопротивление компенсационной обмотки;
Rщ – сопротивление щеточного контакта.
Сопротивление щеточного контакта определяют по формуле:
![]() Ом,
(11)
Ом,
(11)
Подставив значения в формулу (10), получим значение сопротивления якоря двигателя:
![]() Ом
Ом
![]() (12)
(12)
Динамическое сопротивление тиристора
![]() , (13)
, (13)
где Uт=1В – классифицикационное падение напряжения на тиристоре;
Iт.н – среднее значение тока через тиристор при номинальном моменте сопротивления на двигателе.
Среднее значение тока через тиристор определяется по формуле:
![]() А (14)
А (14)
Подставив полученное значение в формулу (13) получим:
![]() Ом
Ом
Коммутационное сопротивление тиристора определяют по формуле
![]() , (15)
, (15)
где m- число фаз преобразователя (для мостовой 3-фазной схемы m=6)
![]() Ом
Ом
Подставив полученные значения в формулы (9), (1),(2) получим следующие результаты
![]() Ом;
Ом;
![]() Гн;
Гн;
![]() с.
с.
