5 Определение передаточной функции тахогенератора
Технические данные тахогенератора ПТ-1 представлены в таблице 3
Таблица3- Технические данные тахогенератора ПТ-1
-
Наименование параметра
Значение
Напряжение номинальное, Uн,В
230
Частота номинальная, nн об/мин
1500
Мощность номинальная, Pн, Вт
15
Ток номинальный, Iн, А
0,0652
Сопротивление якоря, Rя , Ом
123
Сопротивление обмотки возбуждения Rв, Ом
46
Напряжение обмотки возбуждения,Uв , В
55
Передаточная функция тахогенератора имеет вид
![]()
Так как в обратную связь принято подавать напряжение 10 В, то необходим согласующий усилитель, коэффициент усиления рассчитан ниже.
![]() ,
,
Тогда
![]()
6 Определение передаточной функции датчика положения
Примем диапазон регулирования 5 градусов. Тогда, учитывая, что в обратную связь подаётся 10 В, передаточная функция будет иметь вид:
![]()
7 Определение передаточной функции тиристорного преобразователя
Технические данные тиристорного преобразователя ПТТР представлены в таблице 4
Таблица 4-Технические данные тиристорного преобразователя ПТТР 230-100
-
Наименование параметра
Значение
Напряжение номинальное Uн, В
230
Ток номинальный Iн, А
50
Ток длительный допустимый I длит.доп, А
63
Ток максимальный допустимый I max.доп, А
100
Мощность длительная, Рдлит, кВт
18,5
Передаточная функция тиристорного моста вместе с системой импульсно-фазового управления СИФУ, как правило, апроксимируется апериодическим звеном первого порядка с постоянной времени Тт.п.=0,01 с., что обусловлено дискретностью подачи отпирающих импульсов и особенностью работы управляемого тиристорного выпрямителя.
![]() ,
,
где Uт.п – выходное напряжение тиристорного преобразователя;
Uу – напряжение, подаваемое на вход СИФУ тиристорного преобразователя;
К т.п
– коэффициент передачи тиристорного
преобразователя.
т.п
– коэффициент передачи тиристорного
преобразователя.
Следует отметить, что коэффициент тиристорного преобразователя не является величиной постоянной и изменяется в зависимости от величины управляющего напряжения.
![]()
![]()
Техническая реализация:
8 Настройка контура скорости
Рассмотрим контур скорости:
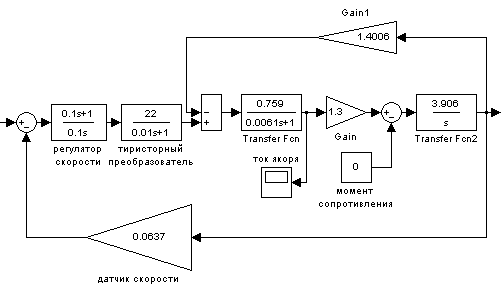
Частотные характеристики такого контура имеют вид:

Для достижения нужных свойств в контуре скорости необходимо приподнять ЛАХ, для большей устойчивости опустим ЛЧХ вниз. Применим ПИ-регулятор, передаточная функция которого:
![]()
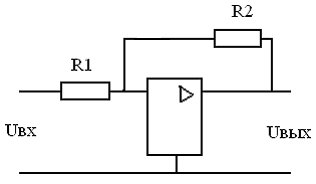
Техническая реализация такого регулятора на базе операционного усилителя приведена на рисунке.

Применив такой регулятор, получаем следующие логарифмические характеристики:

Как видно из графиков, запас устойчивости по модулю порядка 30 дб, по фазе порядка 80 градусов.
9 Определение передаточной функции промежуточного усилителя
В современных тиристорных приводах постоянного тока для улучшения статических и динамических характеристик системы в промежуточные усилители вводятся различные корректирующие цепи, чем обеспечивается регулирование необходимых динамических свойств системы.
В
системах позиционирования статическая
ошибка определяется из выражения:
![]() ,
,
где К – коэффициент усиления разомкнутой системы;
ip – передаточное отношение редуктора;
Мс – приведённый момент сопротивления на валу двигателя,
β
– жёсткость механической характеристики
системы,
![]()
Ошибка
слежения при установившемся вращательном
движении механизма с максимальной
скоростью:
![]() ,
,
где ωмех max – максимальная скорость вращения механизма.
Суммарная ошибка не должна превышать заданной ошибки:
![]() ,
откуда, подставив числовые значения,
находим необходимый коэффициент
разомкнутой системы
,
откуда, подставив числовые значения,
находим необходимый коэффициент
разомкнутой системы
![]() .
Т.к. коэффициент некорректированной
разомкнутой системы равен 33:
.
Т.к. коэффициент некорректированной
разомкнутой системы равен 33:

то
примем коэффициент усиления промежуточного
усилителя равным
![]()
Реализация: