

10.2. Управление гд в синхронном режиме. Режим перевозбуждения гд.
Цель: повысить энергетические показатели ГД (КПД и cos ).
Путь решения: повысить степень возбуждения ротора 0=E0/U – отношение ЭДС холостого хода, пропорциональной остаточной индукции ротора, к напряжению питания.
В синхронном режиме естественная степень возбуждения ГД 0 значительно меньше, чем у СД. Это определяет большое потребление реактивной мощности и приводит к снижению КПД до 0,4-0,5.
Как повысить 0?
Путем снижения напряжения питания в синхронном режиме ГД. При этом уменьшаются ток в обмотке статора (за счет снижения реактивной составляющей). При этом момент на валу (создаваемый активной составляющей тока) остается неизменным, а электрические потери в обмотке статора уменьшаются. КПД увеличивается.
Режим работы, при котором ГД работает с повышенной степенью возбуждения называется режимом перевозбуждения. В этом режиме cos может увеличиться до 1, а КПД до 0,8 – 0,9 [3].
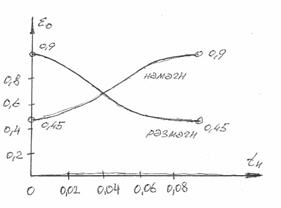
Рис. 6. Зависимости тока, КПД и степени возбуждения от уровня напряжения [1] |
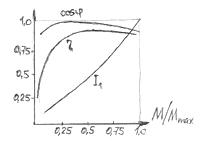
Рис. 7. Рабочие характеристики перевозбужденного ГД |
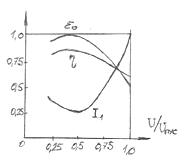
Оптимальный уровень напряжения в синхронном режиме работы в 1,5-2 раза меньше значения напряжения при пуске (рис.6).
Таким образом, ГД запускают при повышенном напряжении, что способствует уменьшению времени разгона инерционных ГД, а при входе в синхронизм снижают напряжение.
Отметим, что при выходе ГД из синхронизма (это возможно при кратковременном снижении напряжения питания или кратковременном увеличении нагрузки выше Мс.макс) приводит к размагничиванию ротора. Для восстановления режима перевозбуждения приходится осуществлять повторное перевозбуждение.
Другой вариант реализации режима перевозбуждения (используемый на практике) – импульсное намагничиваение ротора ГД.
- упрощается реализация режима перевозбуждения;
- обеспечивается стабильность энергетических характеристик.
10.2. Управление гд в синхронном режиме. Импульсное намагничивание ротора гд.
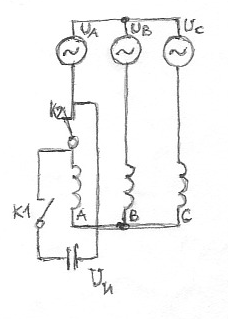
Сущность этого способа управления ГД состоит в периодической подаче импульсов низкой частоты заданной длительности, амплитуды и фазы в напряжение питания ГД.
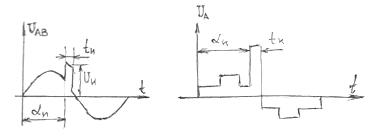
Рис. 8. Осциллограммы напряжения при питании ГД от сети переменного тока и при питании от инвертора напряжения
Именно эти импульсы напряжения кратковременно намагничивают ротор.
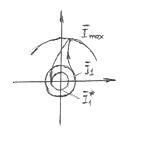
Периодическими импульсами напряжения достигается периодическое кратковременное изменение МДС якоря. При этом вектор тока будет занимать следующее положение на комплексной плоскости (рис. 9).
Рис. 9. Положение вектора тока на комплексной плоскости при импульсном намагничивании |
Начальный уровень тока - I1. При подаче импульса напряжения ток увеличился до Iмакс. После снятия импульса ток снизился до значения I1*. Подмагниченный таким образом ротор разгружает обмотку статора от намагничивающего тока. В некоторых случаях после подмагничивания максимальный момент двигателя в синхронном режиме может увеличиться в 4÷6 раз, а ток статора уменьшится вдвое и стать опережающим [6]. |
При этом существенно увеличиваются коэффициент мощности, момент и КПД двигателя.
Импульсное периодическое намагничивание характеризуется:
- амплитудой импульса напряжения по отношению к амплитуде основного линейного напряжения:
nu = Uи/UAB = 1,0÷2,5
- длительностью импульса по отношению к периоду основной частоты:
tи* = tи/Т = 0.02÷0.2
- фазой импульса: и = 120 – 180 эл.град.
- частотой следования импульсов: fи = 10÷20 Гц.
Степень возбуждения ротора в режиме перевозбуждения определяет произведение Uиtи. В большинстве случаев проще реализуется импульс сравнительно низкой амплитуды, поэтому произведение Uиtи изменяют за счет увеличения tи.
Зависимость степени возбуждения ротора 0 от времени импульса приведена на рис.9, зависимость тока в обмотке статора от фазы импульса – на рис.10.
Рис. 9. Зависимость 0(tи)
|
Рис. 10. Зависимость уровня тока от фазы импульса I(и)
|
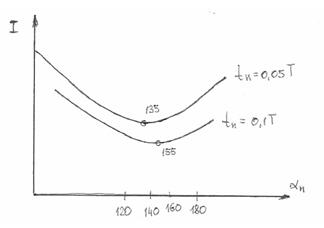
Намагниченность ротора и определяемая ею величина степени возбуждения 0 может регулироваться импульсом тока статора как в сторону увеличения, так и уменьшения.
Для намагничивания и размагничивания необходимо изменять фазу импульса относительно вектора напряжения примерно на электрический угол, равный 180 градусам (рис.9).
Мощность, затрачиваемая на периодическое импульсное подмагничивание, обычно не превышает 5% полезной мощности ГД.
10.3. Техническая реализация режима импульсного намагничивания.
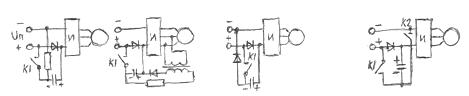
В качестве импульсного источника можно использовать зарядно-разрядные конденсаторные устройства (рис. 12). Низкая частота следования импульсов (до 50 Гц) позволяет применять электролитические конденсаторы. Емкости конденсаторов для ГД мощностью 1-1000 Вт составляют от 2 до 40 мкФ.
|
|
Рис. 12. Техническая реализация режима импульсного намагничивания [1] |
|
10.4. Частотное регулирование гистерезисного электропривода
Применяют:
- для повышения экономичности электропривода;
- для расширения диапазон регулирования скорости вращения.
Следует различать частотное асинхронное регулирование ГД и частотное синхронное регулирование.
Частотное асинхронное регулирование ГД осуществляется при запуске (торможении) таким образом, чтобы обеспечивалось бы постоянное скольжение. Чтобы этого достигнуть необходимо с ростом (или уменьшением) частоты вращения ротора изменять частоту питающего напряжения. По сравнению с запуском с постоянной частотой общие потери снижаются в 1,5-2 раза.
Асинхронное частотное регулирование ГД допускает использование широко известных законов управления и структурных решений частотно-управляемых асинхронных двигателей.
Частотное синхронное регулирование состоит в регулировании частоты вращения ротора путем изменения частоты поля статора (как в синхронных двигателях).
Помимо расширения частотного диапазона такой способ регулирования дает возможность также расширить диапазон изменения нагрузки при сохранении высоких энергетических показателей. Если изменять магнитный поток пропорционально квадратному корню от изменения относительного момента, то поддерживается такое отношение потерь в магнитопроводе к потерям в обмотке, которое соответствует максимальному КПД двигателя.