

8.Средства реализации High Availability кластеров
High Availability кластеры можно распределить на:
Shared Nothing Architecture (архитектура без разделения ресурсов)
Shared Disk Architecture (архитектура с общими дисками)
 Рисунок
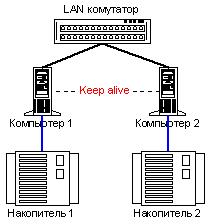
12. Архитектура без разделения ресурсов
Рисунок
12. Архитектура без разделения ресурсов
Архитектура без распределения ресурсов не использует общей системы хранения данных. При ее использовании каждый узел имеет свои дисковые накопители, которые не используются совместно узлами кластерной системы. Фактически, на аппаратном уровне разделяются только коммуникационные каналы.
 Рисунок
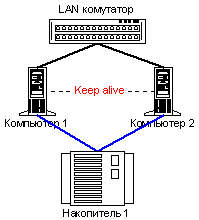
13. Архитектура с общими дисками
Рисунок
13. Архитектура с общими дисками
Архитектура с общими дисками классически используется для построения кластерных систем высокой готовности, ориентированных на обработку больших объемов данных. Такая система состоит из общей системы хранения данных и узлов кластера, которые распределяют доступ к общим данным. При высокой мощности системы хранения данных, при работе с задачами, ориентированными на их обработку, архитектура с общими дисками является более эффективной. В этом случае не нужно держать несколько копий данных и в то же время, при выходе из строя узла, задачи могут быть мгновенно доступны для других узлов.
В случае, если в задаче удается логически разделить данные для того, чтобы запрос из некого подмножества запросов можно было бы обработать с использованиям части данных, то система без разделения ресурсов может оказаться более эффективным решением.
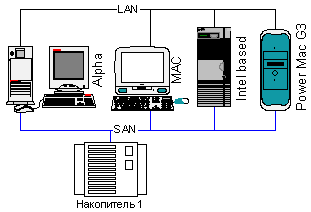
Интересной является возможность построения гетерогенных кластерных систем. Например, программное обеспечение Tivoli Sanergy разрешает строить системы, в которых возможно разделение доступа к данным между гетерогенными узлами. Такое решение может быть очень полезным в системах коллективной обработки видеоинформации или других данных в организации, где на одной платформе просто не существует требуемого спектра решений или же уже существует сформированный парк аппаратных и программных ресурсов, которые нужно использовать более эффективно.
 Рисунок
14. Гетерогенная кластерная система
Рисунок
14. Гетерогенная кластерная система
Самыми популярными коммерческими системами сегодня являются двухузловые отказоустойчивые кластеры.
Различают Активный-Активный (Active-Active) и Активный-Пассивный (Active-Passive) модели реализации отказоустойчивых кластерных систем в отношении распределения програмных ресурсов.
 Рисунок
15. Модель Активный-Активный
Рисунок
15. Модель Активный-Активный
В модели Активный-Активный мы практически получаем вместе с отказоустойчивым решением – решение высокоскоростное, так как одна задача работает на нескольких серверах одновременно. Такой вариант реализован, например, в Oracle Prallel Server, MS SQL 2000, IBM DB2. То есть, реализация такой модели возможна лишь в случае написания прикладного программного обеспечения с ориентацией на функционирование в кластерном режиме (исключение составляют кластерные системы с разделением оперативной памяти).
В модели Активный-Активный возможно масштабирование скорости работы задачи путем добавления нового узла, если конечно программным обеспечением поддерживается необходимое количество нод. Например, Oracle Parallel Server 8.0.5 поддерживает работу на кластере от 2-х до 6-ти узлов.
 Рисунок
16. Активный-Активный кластер на 3-х узлах
Рисунок
16. Активный-Активный кластер на 3-х узлах
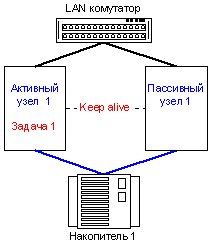
Очень часто пользователи встречаются с такой проблемой, когда нужно обеспечить отказоустойчивое функционирование уже готовых программных решений. К сожалению, модель Активный-Активный в таком случае не работает. Для подобных ситуаций используется модель, в которой обеспечивается миграция задач, выполнявшихся на узле, вышедшем из строя, на другие узлы. Таким образом, мы получаем реализацию Активный-Пассивный.
 Рисунок
17. Модель Активный-Пассивный
Рисунок
17. Модель Активный-Пассивный
Учитывая то, что во многих случаях мы можем разбить одну задачу на несколько распределением зон ответственности, а также то, что в общем случае на предприятии нужно выполнять много разных задач, реализуется так называемая модель кластерной системы псевдо Активный-Активный.
 Рисунок
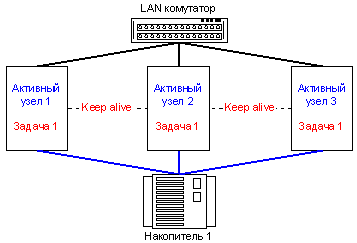
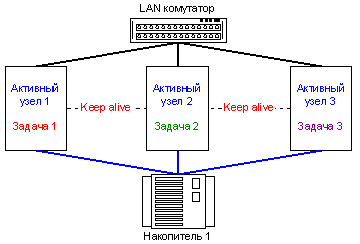
18. Псевдо Активный-Активный кластер на
3-х узлах
Рисунок
18. Псевдо Активный-Активный кластер на
3-х узлах
Если нужно обеспечить отказоустойчивую работу нескольких программных ресурсов, то достаточно добавить в систему новый узел и запустить на кластере нужные вам задачи, которые в случае отказа этого узла перейдут на выполнение на другом узле. Такая модель реализована в программном обеспечении ReliantHA для ОС Caldera OpenUnix и Unixware, которое поддерживает кластеризацию от 2-х к 4-х узлам, в MSCS (Microsoft Cluster Service) и Linux Failover Cluster модели.
Система коммуникаций в отказоустойчивых кластерных системах может быть построена на таком же оборудовании, как и в высокоскоростных кластерах. Но в случае реализации архитектуры с разделяемым дисковым накопителем, возникает необходимость обеспечения высокоскоростного доступа к общей системе хранения данных. Эта задача имеет сегодня множество вариантов решений.
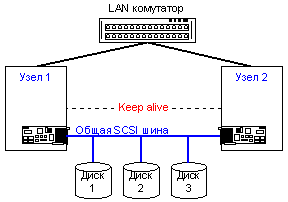
Если используется простейшая 2-х узловая модель, то доступ к дискам может быть построен через их прямое подключение к общей SCSI шине, или с помощью автономной дисковой подсистемы со встроенным контролером SCSI .
В последнем случае диски подключаются ко внутренним независимым каналам дисковой подсистемы.
 Рисунок
19. Архитектура с общей SCSI шиной
Рисунок
19. Архитектура с общей SCSI шиной
 Рисунок
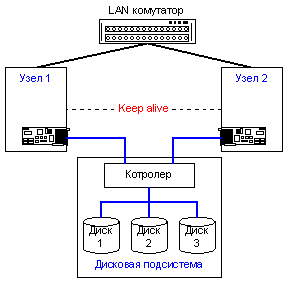
20. Вариант с использованием SCSI to SCSI
дисковой подсистемы
Рисунок
20. Вариант с использованием SCSI to SCSI
дисковой подсистемы
Вариант с использованием SCSI to SCSI дисковой подсистемы является более масштабируемым, функциональным и отказоустойчивым. Несмотря на то, что появляется еще один мостик между узлом и дисками, скорость такой системы обычно выше, так как мы получаем коммутируемый доступ к накопителю (ситуация похожа на использование концентратора и коммутатора в локальной сети). В отличие от варианта с разделением доступа к дискам на общей SCSI шине, отдельная независимая дисковая подсистема имеет также удобную возможность построения систем без точек отказа и возможность построения многоузловых конфигураций. В последнее время начинает приобретать популярность новый последовательный интерфейс для протокола SCSI – FC (Fibre Channel).
На базе FCстроятся так называемые сети хранения данных SAN (Storage Area Network).
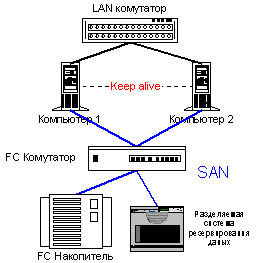 Рисунок
21. Кластерная система с использованием
SAN на базе Fibre Channel
Рисунок
21. Кластерная система с использованием
SAN на базе Fibre Channel
К основным преимуществам Fibre Channel можно отнести практически все его особенности.
Высокие скорости передачи данных
Протоколо-независимость (0-3 уровни)
Большие расстояния между точками
Низкие задержки при передаче коротких пакетов
Высокая надежность передачи данных
Практически неограниченное масштабирование
Многоточечные топологии
Эти замечательные особенности Fibre Channel получил благодоря тому, что в его проектировании принимали участие специалисты в областях как канальных, так и сетевых интерфейсов, причем им удалось объединить в одном FC интерфейсе положительные черты обоих.
Для понимания значимости FC приведем сравнительную табличку FC и параллельного SCSI интерфейса.
Таблица 2. Таблица сравнительных характеристик FC и параллельного SCSI интерфейса
|
Fibre Channel |
Parallel SCSI |
Быстродействие |
100MB/s Новый стандарт: 200MB/s & 400MB/s |
Ultra160m – 160MB/s Новый стандарт: 320MB/s |
Максимальные расстояния |
Copper: 30m Fiber optic: 2-10km |
Copper, single-ended: 3m Copper, differential: 25m |
Протоколы, которые поддерживаются |
SCSI, TCP/IP, VI, IPI, ESCON, HIPPI, FCON и прочие |
SCSI |
Максимальное количество подключений |
127 на кольцо, 224 на коммутатор |
16 на канал |
Топологии |
кольцо, точка-точка, коммутатор |
точка-точка, чрезвычайно сложная реализация устройства коммутации каналов |
Сегодня FC устройства стоят дороже, чем устройства с параллельным SCSI, но разница в цене в последнее время резко уменьшается. Диски и системы хранения данных уже практически равны по стоимости с параллельными SCSI реализациями, значительную разницу в стоимости обеспечивают только FC адаптеры.
Существует еще один очень интересный вариант реализации кластерной архитектуры – кластерная система с разделяемой памятью (в т.ч. оперативной) Shared Memory Cluster. Фактически этот кластер может функционировать как в модели умеренно связанной многопроцессорной системы, так и тесно связанной. Такая система, как уже говорилось в начале статьи, называется NUMA.
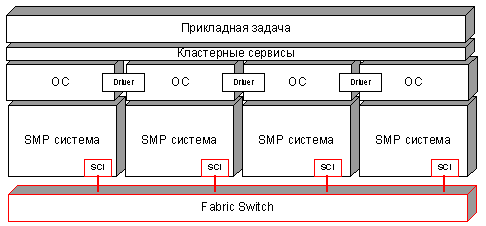 Рисунок
22. Модель кластера с разделяемой памятью
Рисунок
22. Модель кластера с разделяемой памятью
Кластер с разделяемой памятью использует программное обеспечение (кластерные сервисы), которое обеспечивает один образ системы (single system image), даже если кластер построен как архитектура без распределения ресурсов, которым его соответственно видит операционная система.
В завершение темы о кластерных системах высокой готовности, рассмотрим статистику по простоям различных систем.
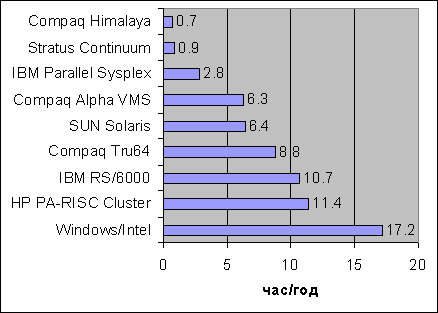 Рисунок
23. Сравнение среднего времени простоя
различных систем
Рисунок
23. Сравнение среднего времени простоя
различных систем
Приведены усредненные данные, а также данные, взятые из рекламных материалов одной из компаний производителей, поэтому их нужно воспринимать с некоторой долей критичности. Однако общая картина, которую они описывают, является вполне корректной.
Как видим, кластерные системы высокой готовности не являются панацеей при минимизации простоев. Если простой системы является чрезвычайно критичным, тогда следует использовать системы класса Fault Tolerant или Continuous Availability, системы такого класса имеют коэффициент готовности на порядок выше, чем системы класса High Availability.