

1.Средняя длина очереди заявок, ожидающих обслуживания в системе:
 ( 2.5)
( 2.5)
где 1- средняя длина очереди заявок в S1; 2 - средняя длина очереди заявок в S2; 1 = 1 1 - среднее число занятых процессоров в S1; 2 = 2 2 - среднее число занятых каналов в S2;
 ;
;
 -
интенсивности потоков, входящих в
системы S1
и S2
соответственно;
-
интенсивности потоков, входящих в
системы S1
и S2
соответственно;
 -
среднее время обслуживания заявки в
процессоре;
-
среднее время обслуживания заявки в
процессоре;
2 - среднее время обслуживания заявки одним из каналов ввода-вывода, т.е. среднее время обмена информацией между ОП и ВП. N - число каналов в системе S1; C- число каналов в системе S2;
-
вероятность
того, что система S1
свободна от обслуживания заявок ;
- вероятность того, что система S2 свободна от обслуживания заявок;
2. Среднее время ожидания заявок в очереди :
 .
( 2.6)
.
( 2.6)
3. Среднее время пребывания заявок в системе :
 (
2.7)
(
2.7)
Основные задачи теории кс
В теории КС широко используются следующие задачи:
1. Задачи анализа;
2. Задачи синтеза;
3. Задачи идентификации.
Задача анализа - определение свойств, присущих системе или классу систем (получение характеристик на основе структур параметров и режимов обработки). В общем случае задача синтеза формулируется следующим образом. Исходя из цели исследования назначается набор характеристик исследуемого объекта (вычислительная система, ее элемент, некоторый процесс и др.) и точность , с которой они должны быть определены. Требуется найти способ оценки характеристик объекта с заданной точностью и на основе этого способа определить характеристики.
Задача синтеза. Синтез – процесс создания вычислительной системы, наилучшим образом соответствующей своему назначению. Исходными в задаче синтеза являются: 1. функция системы (класс решаемых задач);
2. ограничения на характеристики системы (производительность, надежность и др.); 3. критерий эффективности, устанавливающий способ оценки качества системы в целом. Необходимо выбрать конфигурацию системы и режим обработки данных, удовлетворяющие заданным ограничениям и оптимальные по критерию эффективности.
Проектирование системы ведется сверху вниз – от наиболее общих решений, связанных с системой в целом, к частным решениям, относящимся к отдельным подсистемам и их частям.
Сложность задачи синтеза КС обусловлена числом варьируемых параметров, описывающих конфигурацию и режим функционирования системы и областью варьирования параметров. Для решения задач синтеза используются математические методы линейного и нелинейного программирования и имеют большую вычислительную сложность из-за нелинейности функций.
Задачи идентификации. При эксплуатации КС возникает необходимость в повышении их эффективности путем подбора конфигурации и режима функционирования, соответствующих классу решаемых задач и требованиям к качеству обслуживания пользователей. В связи с ростом нагрузки на систему может потребоваться изменение конфигурации системы, использование более современных операционных систем и реализуемых ими режимов обработки. В этих случаях следует оценить возможный эффект, для чего необходимы модели производительности и надежности систем. Построение модели системы на основе априорных сведений об ее организации и данных измерений называется идентификацией системы
Модель функционирования ЦУС.
Обработка заявок организуется по схеме, показанной на рис. 1. Заявки z1, ..., zМ поступают в устройство прерывания, являющееся частью процессора. При появлении заявки zi устройство прерывания инициирует в процессоре операцию прерывания, в результате выполнения которой процессор переключается на выполнение программы приема и постановки заявок в очередь, называемой ДИСПЕТЧЕР 1.
ДИСПЕТЧЕР1 опознает тип поступившей заявки и ставит заявку в соответствующую очередь Оj на обслуживание. Очередь в физическом отношении состоит из совокупности ячеек оперативной памяти, в которых размещаются коды поступивших заявок. В общем случае многие из очередей содержат заявки, ожидающие обслуживания. В каждый момент времени процессор может выполнять только одну программу. Процесс выбора заявки из множества заявок, ожидающих обслуживания, называется диспетчированием.
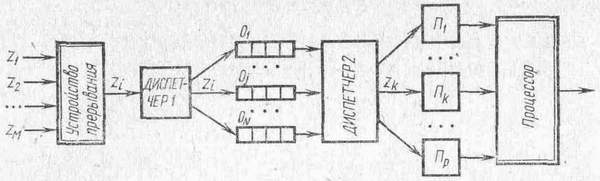
Рис. 3. Обработка заявок в ЦУС
Процедура диспетчирования реализуется программой ДИСПЕТЧЕР2 , которая анализирует состояния очередей O1 , ..., ON, выбирает заявку zk,, имеющую преимущественное право на обслуживание, и инициирует соответствующую прикладную программу Пk. Считается, что в момент окончания работы программы обслуженная заявка покидает систему. По окончании программы Пk управление вновь передается ДИСПЕТЧЕРУ2, который выбирает очередную заявку и инициирует соответствующую прикладную программу. Если очереди пусты, ДИСПЕТЧЕР2 переключает процессор в состояние ожидания.
Таким образом, обработка заявки проводится в два этапа: на первом этапе заявка принимается ДИСПЕТЧЕРОМ1 в систему и ставится в очередь, где ожидает обслуживания; на втором этапе заявка выбирается ДИСПЕТЧЕРОМ2, который организует обслуживание заявки, инициируя соответствующую прикладную программу. Программы ДИСПЕТЧЕР1 и ДИСПЕТЧЕР2 управляют порядком обработки заявок и относятся к классу управляющих программ. ДИСПЕТЧЕР1 является короткой программой, для выполнения которой требуется несколько десятков операций процессора. Она инициируется устройством прерывания в момент поступления на его вход очередной заявки. При этом работа процессора, занятого выполнением какой-то программы, прерывается. ДИСПЕТЧЕР1, заканчивая работу, передает управление ДИСПЕТЧЕРУ2, который продолжает выполнение прерванной программы или начинает обслуживание поступившей заявки, если она имеет преимущественное право на обслуживание по сравнению с остальными заявками.
Правило диспетчирования, на основе которого из очередей выбираются заявки на обслуживание, называется дисциплиной обслуживания. Заданная дисциплина обслуживания реализуется управляющей программой— ДИСПЕТЧЕРОМ2.
Реальный масштаб времени. Характерная особенность рассматриваемых систем — наличие предельных ограничений на время пребывания заявок в системе. Это время равно сумме времени ожидания, когда заявка ожидает в очередях, и времени обслуживания, затрачиваемого процессором на выполнение соответствующей программы Отсутствие управляющей информации, порождаемой алгоритмом, в течение заданного времени может привести к нарушению работы управляемого объекта (например, будет потеряна цель, за которой следит система).
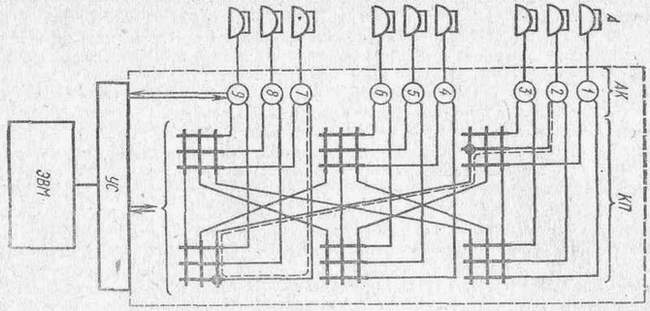
Рис. 4 Упрощенная схема АТС с программным Управлением
Превышение времени ведет к потере качества (например, ухудшается качество продукта, выпускаемого технологической установкой). Таким образом, система должна функционировать в темпе работы обслуживаемого ею объекта.
Режим работы, при котором существуют предельные ограничения на время реализации программ, называется работой в реальном масштабе времени (РМВ). РМВ обеспечивается корректным выбором быстродействия устройств, входящих в управляющую систему, и планированием порядка выполнения программ, при котором наиболее важные работы реализуются в первую очередь. Планирование сводится, в Частности, к инициированию программ в порядке, отличном от порядка поступления заявок на их выполнение. Так, если в систему заявки поступили в порядке z, z, z, z, то при необходимости уменьшить время обработки заявок и программы должны быть выполнены в следующем порядке: П, П, П, П.
Системы, работающие в РМВ совместно с объектом, непрерывно функционирующим во времени, называются цифровыми управляющими системами (ЦУС).
В данном случае будем предполагать, что ЦУС строится по схеме, в которой процессор — единственный ресурс, необходимый для решения задач — обслуживания заявок.
Пример 1. В качестве примера системы РМВ рассмотрим автоматическую телефонную станцию (АТС) с программным управлением.
Упрощенная схема АТС приведена на рис. 4. Система состоит из абонентских телефонных аппаратов А, подсоединяемых к АТС через абонентские комплекты АК, которым присвоены номера 1, 2, ..., 9. Соединение между абонентами Ai и Aj устанавливается посредством коммутационного поля КП, состоящего в данном примере из шести коммутаторов типа 33. Цепь соединения между абонентами А2 и A7 показана штриховой линией. Для управления телефонным оборудованием используется ЭВМ, которая подключается к телефонному оборудованию через устройство сопряжения УС, выполняющее функции канала ввода — вывода информации. Основные функции ЭВМ состоят в управлении телефонным оборудованием с целью обслуживания заявок на соединения, генерируемых абонентами. Процесс обслуживания носит многоэтапный характер.
Основные этапы обслуживания следующие.
Этап 0. Определение номеров абонентов, требующих или заканчивающих обслуживание, т. е. поднявших или положивших трубку аппарата. Когда трубка находится на аппарате, то состояние АК. равно 0, когда поднята — равно 1.
ЭВМ опрашивает АК с периодом 100 мс, при этом считывается информация о состояниях всех АК (бит на один АК). Массив текущих состояний АК сравнивается с массивом предыдущих состояний. Если одноименный бит i в массивах изменил свое значение с 0 на 1, абонент Ai требует обслуживания и номер i заносится в очередь на первый этап обслуживания. Если бит i переключился из 1 в 0, то номер абонента заносится в очередь на этап 7 обслуживания. Текущему состоянию АК приписывается смысл предыдущего.
Этап 1. Если АТС может принять абонента на обслуживание, то через АК абоненту дается сигнал готовности станции (непрерывный гудок). С этой целью ЭВМ формирует совокупность команд, которые посылаются через УС на комплекты, вызывая посылку сигнала готовности станции. Абоненты заносятся в очередь на прием номера.
Этап 2. Сканируются АК, указанные в очереди на прием номера. В момент номеронабирания абонент с дисковым аппаратом посылает серии импульсов с периодом 60 мс. Количество импульсов в серии определяет цифру номера вызываемого абонента. Серии разделяются паузами длительностью не менее 500 мс. ЭВМ сканирует АК, как на этапе 0, подсчитывает число импульсов в сериях, выделяет межцифровые интервалы и формирует из цифр номера вызываемых абонентов.
Этап 3. ЭВМ опознает номера вызываемых абонентов: двузначные специальных служб, внутристанционной связи (между абонентами одной АТС), межстанционной связи (с абонентами других АТС), АТС междугородной связи. Номера вызывающего Ai и вызываемого Аj абонентов ставятся в очередь на последующий этап обслуживания, в частности при внутристанционной связи — в очередь к этапу 4.
Этап 4. Проверяются состояния АК вызываемых абонентов (анализируется состояние массива, полученного на этапе 0). Если абонент Aj занят, ЭВМ формирует команду комплекту АК, который, реагируя на команду, посылает абоненту сигнал занятости (частые гудки). Если абонент Aj свободен, то заявка (Аi, Aj) ставится в очередь на установление соединения.
Этап 5. Соединения (Ai, Aj) устанавливаются приключением цепей через коммутаторы. Текущее состояние коммутационного поля отображается в памяти ЭВМ. ЭВМ отыскивает путь проключения соединений и формирует последовательность команд, поступающих через УС на коммутаторы. Коммутаторы, реагируя на команды, обеспечивают соединение заданных цепей. В каждый момент времени один коммутатор может выполнять только одну команду, но последовательностью команд на коммутаторе может быть организована допустимая группа соединений. Номера (Ai, Aj), для которых проключены соединения, переходят к следующему этапу обслуживания.
Этап 6. Через комплекты АК посылаются сигналы вызова (звонок). На основе информации, получаемой на этапе 0, определяется момент подъема трубки абонентом Aj. После этого сигнал вызова отключается и комплекты (Ai, Aj) включаются командами, формируемыми ЭВМ, в режим разговорного соединения.
Этап 7. В момент опускания трубки абонентом Ai или Aj производится посылка сигнала отбоя (прерывистые гудки) второму абоненту и аппаратура КП приводится в исходное состояние. При этом, в частности, формируется последовательность команд на разъединение соединений (Ai, Aj), посылаемая через УС на соответствующие коммутаторы.
Перечисленные этапы обслуживания выделены только в иллюстративных целях. Реальный алгоритм установления телефонных соединений значительно сложнее, поскольку включает в себя очень большое число функций: установление входящих и исходящих межстанционных связей, обслуживание таксофонов, установление одновременной связи между многими абонентами (конференцсвязь) и т. п.
Сигналы, формируемые абонентами и устройствами АТС на каждом из указанных этапов, являются заявками на выполнение соответствующих обслуживающих программ. Заявки принимаются, ставятся в очередь и выбираются на обслуживание в соответствии со схемой, показанной на рис. 3.1. При емкости АТС, равной 10000 номеров, и при интенсивности вызовов, равной 6 вызовам/ч на одну абонентскую линию, в каждый момент времени АТС занята обслуживанием в среднем 1000 вызовов, находящихся на различных этапах обработки. Обслуживание этих заявок производится ЭВМ и устройствами коммутационного оборудования и сводится к выполнению соответствующих программ, хранимых в оперативной или постоянной памяти ЭВМ. Программы должны инициироваться в последовательные моменты времени, и очередность обслуживания заявок определяется дисциплиной обслуживания, которая обеспечивает выполнение ограничений на предельно допустимое время пребывания заявок в системе. Ясно, что запаздывание в приеме цифр номера (этап 2) приведет к искажению номера вызываемого абонента, что недопустимо. Запаздывание обслуживания на других этапах не носит катастрофического характера, но вызывает ухудшение качества системы — увеличивается время установления соединений, вследствие чего снижается производительность АТС. Таким образом, для рассматриваемой системы важен вопрос о темпе обслуживания, поэтому ЭВМ должна работать в РМВ.
Характеристики качества ЦУС.
Качество ЦУС определяется в первую очередь временем пребывания заявок в системе, характеризуемым промежутком времени от момента поступления заявки до момента окончания ее обслуживания, в который заявка покидает систему. Следовательно, определение времен пребывания заявок — первоочередная задача анализа ЦУС. Функционирование ЦУС можно рассматривать как совокупность трех процессов: поступления заявок на вход системы, диспетчирования и обслуживания заявок. Можно ожидать, что времена пребывания заявок зависят от параметров каждого из этих процессов.
В ЦУС прикладные программы выполняются в порядке, соответствующем моментам поступления заявок, которые в общем случае случайны. К тому же время реализации одной и той же программы в общем случае не постоянно и зависит от данных, поступающих извне в систему. Таким образом, функционирование ЦУС носит стохастический характер, что позволяет рассматривать такие системы как системы массового обслуживания и описывать их в терминах теории массового обслуживания.
Выбор параметров систем реального времени
В зависимости от требований к временным характеристикам различают следующие режимы обработки заданий в систем реального времени :