

2. Основные технические характеристики контроллеров и программно-технических комплексов
Современный рынок контроллеров и программно-технических комплексов весьма разнообразен. Выбор наиболее приемлемого варианта автоматизации представляет собой многокритериальную задачу, решением которой является компромисс между стоимостью, техническим уровнем, надежностью, комфортностью, затратами на сервисное обслуживание, полнотой программного обеспечения и многим другим. Одной из популярных систем контроля и управления технологическими процессами является комплекс GE Fanuk.
На рис. 7 приведена обобщенная архитектура контроллеров и устройств GE Fanuc.
Рис. 7. Обобщенная архитектура системы на базе контроллеров GE Fanuc.
Размеры базовой платы на 5 слотов: 320 х 283 х 184 мм. Размеры базовой платы на 9 слотов: 483 х 283 х 184 мм. Размеры базовой платы на 17 слотов: 483 х 283 х 184 мм (модули формата VME).
Интерфейс RS-485: описание, подключение Стандарт RS-485 — это номер стандарта, впервые принятого Ассоциацией электронной промышленности (EIA). Cейчас этот стандарт назывется TIA/EIA-485 Electrical Characteristics of Generators and Receivers for Use in Balanced Digital Multipoint Systems (Электрические характеристики передатчиков и приемников, используемых в балансных цифровых многоточечных системах). В народе RS-485 — это название популярного интерфейса, используемого в промышленных АСУТП для соединения контроллеров и другого оборудования. Главное отличие RS-485 от также широко распространенного RS-232 — возможность объединения нескольких устройств. Описание интерфейса RS-485 Интерфейс RS-485 обеспечивает обмен данными между несколькими устройствами по одной двухпроводной линии связи в полудуплексном режиме. Широко используется в промышленности при создании АСУ ТП.
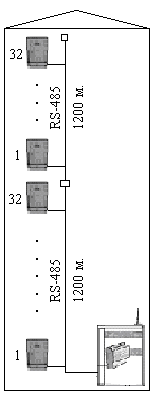
RS-485 обеспечивает передачу данных со скоростью до 10 Мбит/с. Максимальная дальность зависит от скорости: при скорости 10 Мбит/с максимальная длина линии — 120 м, при скорости 100 кбит/с — 1200 м.
Количество устройств, подключаемых к одной линии интерфейса, зависит от типа примененных в устройстве приемопередатчиков. Один передатчик рассчитан на управление 32 стандартными приемниками. Выпускаются приемники со входным сопротивлением 1/2, 1/4, 1/8 от стандартного. При использовании таких приемников общее число устройств может быть увеличено соответственно: 64, 128 или 256.
Стандарт не нормирует формат информационных кадров и протокол обмена. Наиболее часто для передачи байтов данных используются те же фреймы, что и в интерфейсе RS-232: стартовый бит, биты данных, бит паритета (если нужно), стоповый бит. Протоколы обмена в большинстве систем работают по принципу "ведущий"-"ведомый". Одно устройство на магистрали является ведущим (master) и инициирует обмен посылкой запросов подчиненным устройствам (slave), которые различаются логическими адресами. Одним из популярных протоколов является протокол Modbus RTU. Тип соединителей и распайка также не оговариваются стандартом. Встречаются соединители DB9, клеммные соединители и т.д.
Подключение
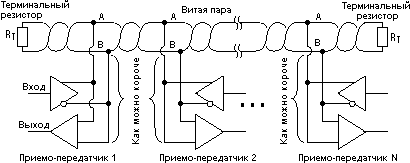
На рисунке изображена локальная сеть на основе интерфейса RS-485, объединяющая несколько приемо-передатчиков. При подключении следует правильно присоединить сигнальные цепи, обычно называемые А и В. Переполюсовка не страшна, но устройство работать не будет.
Витая пара является оптимальным решением для прокладки сети, поскольку обладает наименьшим паразитным излучением сигнала и хорошо защищена от наводок. В условиях повышенных внешних помех применяют кабели с экранированной витой парой, при этом экран кабеля соединяют с защитной "землёй" устройства.
Терминальные резисторы обеспечивают согласование "открытого" конца кабеля с остальной линией, устраняя отражение сигнала. Номинальное сопротивление резисторов соответствует волновому сопротивлению кабеля, и для кабелей на основе витой пары обычно составляет 100 - 120 Ом. Например, широко распространённый кабель UTP-5, используемый для прокладки Ethernet, имеет импеданс 100 Ом. Специальные кабели для RS-485 марки Belden 9841 ... 9844 — 120 Ом. Для другого типа кабеля может потребоваться другой номинал. Резисторы могут быть запаяны на контакты кабельных разъемов у конечных устройств. Иногда резисторы бывают смонтированы в самом устройстве и для подключения резистора нужно установить перемычку. В этом случае при отсоединении устройства линия рассогласовывается, и для нормальной работы остальной системы требуется подключение согласующей заглушки.
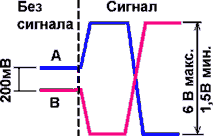
Интерфейс RS-485 использует балансную (дифференциальную) схему передачи сигнала. Это означает, что уровни напряжений на сигнальных цепях А и В меняются в противофазе, как показано на приведенном ниже рисунке:
Передатчик должен обеспечивать уровень сигнала 1,5 В при максимальной нагрузке (32 стандартных входа и 2 терминальных резистора) и не более 6 В на холостом ходу. Уровни наряжений измеряют дифференциально, один сигнальный провод относительно другого. На стороне приемника RS-485 минимальный уровень принимаемого сигнала должен быть не менее 200 мВ.
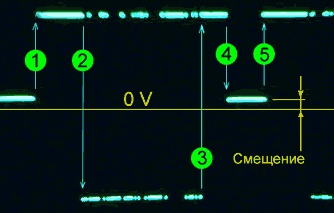
Ниже приведена осциллограмма реального обмена (запрос и начало ответа) при обмене двух контроллеров ВАРИКОНТ по интерфейсу RS-485 (цепь A относительно цепи B). На осциллограмме цифрами отмечены некоторые ключевые моменты:
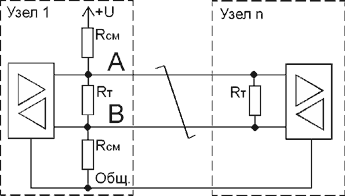
Как видно на осциллограмме выше, в отсутствие сигнала на сигнальных цепях имеется небольшое смещение. Это смещение предназначено для защиты приемников от ложных срабатываний. Рекомендуется создавать смещение немногим более 200 мВ (зона недостоверности входного сигнала согласно стандарту). При этом цепь A "подтягивают" к положительному полюсу источника, а цепь B — к "общему". Один из вариантов реализации цепи смещения показан ниже:
Номиналы резисторов рассчитывают, исходя из требуемого смещения и напряжения источника питания. Например, мы хотим получить смещение 250 мВ при терминальных резисторах Rт = 120 Ом и напряжении источника 12 В. Учитывая, что 2 терминальных резистора включены параллельно и не принимая во внимание нагрузку от приемников, получаем ток смещения I = U / R = 0,250 В / 60 Ом = 0,0042 А. Общее сопротивление цепи смещения R = U / I = 12 В / 0,0042 А = 2857 Ом. Получаем Rсм = (2857 - 60) / 2 ~= 1400 Ом. Выбираем ближайший номинал — 1,3 или 1,5 кОм. Мы, например, используем для смещения резисторы 1,5 кОм и внешний 12-вольтовый, гальванически развязанный выход блока питания контроллера ВАРИКОНТ, который является ведущим в своём сегменте сети. Возможны другие варианты реализации смещения, например, распределённая схема с резисторами большого номинала на каждом узле. При размещении цепей смещения следует принимать во внимание, что узел, обеспечивающий смещение, может быть выключен или вовсе удалён из сети. При использовании приёмо-передатчиков с гальванической развязкой (типа MAX1480) следует использовать и гальванически развязанный источник питания, иначе пользы от дорогих приёмо-передатчиков не будет никакой. При наличии смещения потенциал цепи А на холостом ходу положителен относительно цепи B, что может служить ориентиром при подключении нового устройства к кабелю с немаркированными проводами.
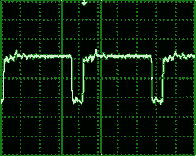
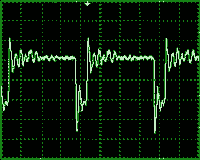
Выполнение перечисленных выше рекомендаций гарантирует нормальную передачу электрических сигналов в любую точку сети на основе интерфейса RS-485. При несоблюдении хотя бы одного из требований сигнал искажается. Вот, например, осциллограммы сигнала, снятого в точке подключения приемника, расположенного в 15 метрах от передатчика и 30 метрах от конца линии, при включенном и отключенном согласующем резисторе:
Следующая осциллограмма показывает искажения сигнала, возникающие при подключении к основному согласованному кабелю длинным 3-метровым отводом:
Приведенные осциллограммы характерны для высоких скоростей обмена (1 Мбит/с и выше). Однако и на более низких скоростях не следует пренебрегать приведенными рекомендациями, даже если "оно и так работает". Рекомендации по программированию При программировании приложений для контроллеров, использующих для связи интерфейс RS-485, следует учитывать несколько моментов:
RS-232 |

Протоколы сети управления КС АСУ ТП.
Рассмотрим протоколы наиболее популярных производителей оборудования для АСУ ТП.
Протокол MODBUS
Протокол CANbus
Протокол BITBUS
Протокол FIP (Factory Information Protocol)
Протокол PROFIBUS (PROcess Feld BUS)
Рис. 1. Сетевая архитектура и протоколы АСУТП.
Протокол MODBUS можно назвать наиболее распространенным в мире. Для работы со своими устройствами его используют десятки фирм. Протокол привлекает простотой логики и независимостью от типа интерфейса (RS-232С, RS-422, RS-485 или же токовая петля 20 мА).
Протокол работает по принципу Master/Slave (ведущий-ведомый). Конфигурация на основе этого протокола предполагает наличие одного Master-узла и до 247 Slave-узлов, Только Master инициирует циклы обмена данными. Существует два типа запросов:
запрос/ответ (адресуется только один из Slave-узлов); широковещательная передача (Master через выставление адреса 0 обращается ко всем остальным узлам сети одновременно).
На рис. 2. приведен пример взаимодействия контроллеров SCADA-Pack/Slaves через интерфейс RS-485, используя стандартный протокол обмена Modbus. Для связи контроллеров SCADAPack с рабочей станцией через сеть Ethernet использован модуль/шлюз Ethernet 5905.
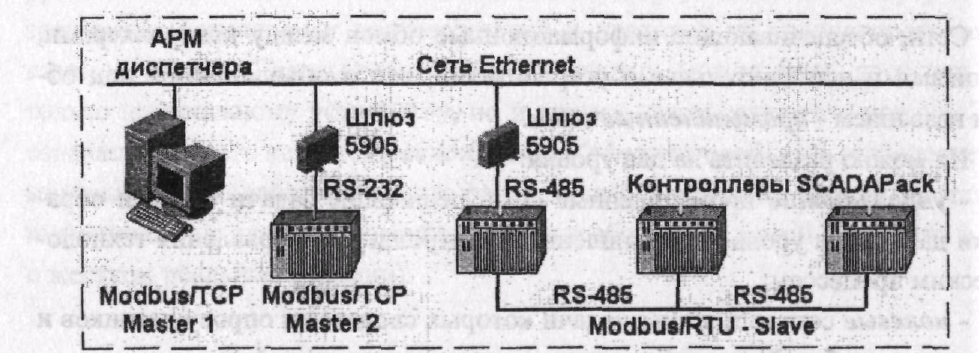
Рис. 2. Взаимодействие контроллеров по протоколу Modbus.
CANbus (Control Area Network) - это последовательная шина с децентрализованным доступом. Возможные коллизии, связанные с одновременным запросом шины, разрешаются на основе приоритетности передаваемых сообщений. В CANbus каждый блок данных содержит дополнительный 11-битовый идентификатор, который и является приоритетом данного сообщения. Право на работу с шиной получит тот узел, который передает сообщение с наивысшим приоритетом.
Протокол CANbus закрывает 1-ый и 2-ой уровни модели OSI. По своим характеристикам он удовлетворяет не только требованиям задач реального времени, но и реализует высокую степень обнаружения и исправления ошибок. В каждом сообщении может быть передано до 8 бит данных. Большие блоки можно передавать за счет использования принципа сегментации.
Протокол BITBUS разработан фирмой INTEL в 1984 году для построения распределенных систем, в которых требовалось обеспечить высокую скорость передачи, детерминизм и надежность.
Физический интерфейс основан на RS-485. Информационный обмен организован по принципу "запрос -ответ" (Master /Slave).
Протокол BITBUS определяет два режима передачи данных по шине:
- Синхронный режим используется при необходимости работы на большой скорости, но на ограниченных расстояниях. В этом режиме к шине можно подключить до 28 узлов, но длина шины ограничиваться 30 м. Скорость может быть от 500 Кбод до 2,4 Мбод. Синхронный режим передачи предполагает использование двух пар проводов (одной пары - для данных, другой -для синхронизации).
Использование режима с самосинхронизацией позволяет значительно удлинить шину. Стандартом определены две скорости передачи: 375 Кбод (до 300м) и 62,5 Кбод (до 1200м). Используя повторители, можно объединять последовательно несколько шинных сегментов (до 28 узлов на сегмент). Тогда общее число узлов можно довести до 250, а длину общей шины - до нескольких километров. При этом режиме передачи также используются две пары проводников (одна для данных, другая для управления повторителем).
Протокол FIP (Factory Information Protocol) обеспечивает высокие скорости передачи и строго определенные интервалы обновления данных. Протокол имеет гибридный централизованный/децентрализованный контроль за шиной, основанный на принципе широкого вещания. Использование режима широкого вещания избавляет от необходимости присваивания каждому устройству уникального сетевого адреса.
Каждый узел на шине полностью автономен. Все узлы имеют возможность получать предназначенные для них данные. Контроль осуществляется со стороны центрального узла сети, называемого арбитром.
FIP протокол поддерживает уровни 1, 2 и 7 модели OSI. В качестве среды передачи используются витая пара или оптоволокно. Максимальная протяженность сети - 1000м без повторителей (до 15 км с оптическими повторителями) при скорости обмена 1 Мбит/с. Сеть поддерживает до 128 устройств.
Контроллеры семейства Premium (Schneider Electric) используют разновидность сети FIP (FIPIO) для организации удаленного ввода/вывода. По этой сети к центральному процессору (через встроенный порт) могут быть подключены (рис. 2.7):
удаленный ввод/вывод контроллеров Momentum;
панель управления оператора ССХ 17;
персональные компьютеры и другие устройства.
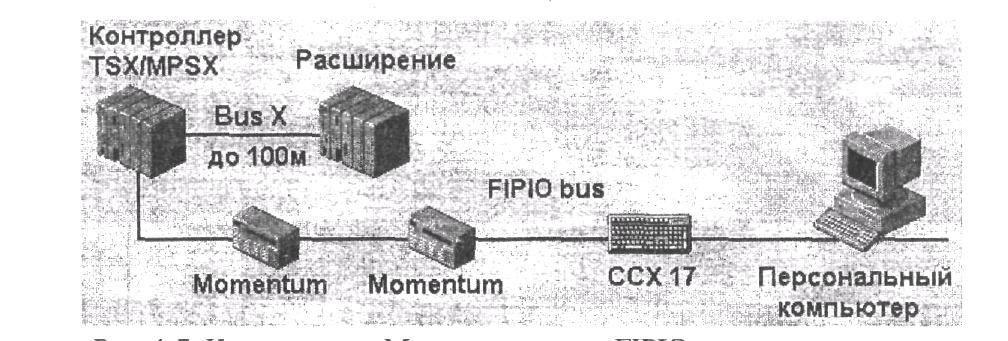
Рис. 3. Контроллеры Momentum в сети FIPIO.
Протокол PROFIBUS (PROcess Held BUS) разработан в Германии. Стандарт протокола описывает уровни 1,2 и 7 OSI-модели. В PROFIBUS используется гибридный метод доступа Master/Slave и децентрализованная процедура передачи маркера.
Сеть может состоять из 122 узлов, из которых 32 могут быть Master-узлами. Адрес 0 зарезервирован для режима широкого вещания. В среде Master-узлов по возрастающим номерам узлов передается маркер, который предоставляет право ведения циклов чтения/записи на шине. Все циклы строго регламентированы по времени, организована продуманная система тайм-аутов. Протокол хорошо разрешает разнообразные коллизии на шине. Настройка всех основных временных параметров идет по сценарию пользователя. Рабочая скорость передачи может быть выбрана в диапазоне 9,6-12 000 Кбит/с.
При построении многоуровневых систем автоматизации часто возникают задачи организации информационного обмена между уровнями.
В одном случае необходим обмен комплексными сообщениями на средних скоростях.
В другом - быстрый обмен короткими сообщениями с использованием упрощенного протокола обмена (уровень датчиков).
В третьем требуется работа в опасных участках производства (нефтегазовые технологии, химическое производство). Для всех этих случаев PROFIBUS имеет решение.
Под общим названием понимается совокупность трех отдельных протоколов: PROFIBUS-FMS, PROFIBUS-DP и PROFIBUS-PA.
Протокол PROFIBUS-FMS появился первым и был предназначен для работы на так называемом цеховом уровне. Здесь требуется высокая степень функциональности, и этот критерий важнее критерия скорости. Основное его назначение - передача больших объемов данных.
В задачах управления, требующих реального времени, на первое место выдвигается такой параметр, как продолжительность цикла шины. Реализация протокола PROFIBUS-DP дает увеличение производительности шины (например, для передачи 512 бит данных, распределенных по 32 станциям, требуется всего 6 мс).
Протокол PROFIBUS-PA - это расширение DP-протокола в части технологии передачи, основанной не на RS-485, а на реализации стандарта ШС1158-2 для организации передачи во взрывоопасных средах. Он может использоваться в качестве замены старой аналоговой технологии 4-20мА. Для коммутации устройств нужна всего одна витая пара, которая может одновременно использоваться и для информационного обмена, и для подвода питания к устройствам полевого уровня.
Протокол PROFIBUS-DP поддерживается устройствами разных производителей. Для контроллеров компании Siemens этот протокол является основным (рис. 1.8). Некоторые контроллеры семейств S7-300 и $7-400 имеют встроенный порт PROFIBUS-DP, другие взаимодействуют с сетью посредством коммуникационных процессоров.
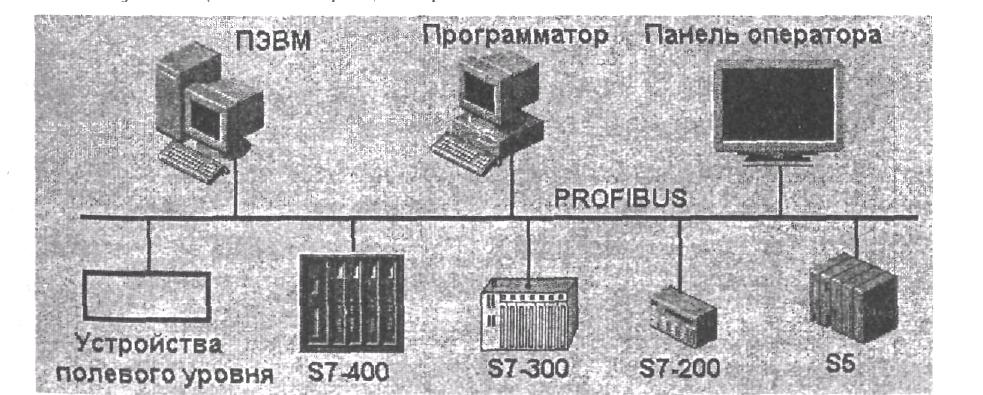
Рис. 4. Контроллеры Simatic S7 в сети Profibus-DP.
Сеть DH+ (Allen-Bradley) поддерживает передачу данных и удаленное программирование контроллеров в дополнение к одноранговой связи между другими процессорами и устройствами (рис. 1.9). Магистральная линия сети DH+ может иметь протяженность до 3048м, ответвления - до 30м. К одной сети DH+ можно подключить до 64 устройств. Скорость передачи данных зависит от длины шины и может настраиваться от 57.6 Кбод (3048м) до 230.4 Кбод (750м).
Характеристика одноранговой связи:
отсутствие "мастера";
минимальный сетевой трафик;
любой контроллер инициализирует связь с любым сетевым узлом;
простота наращивания контроллеров в сети.
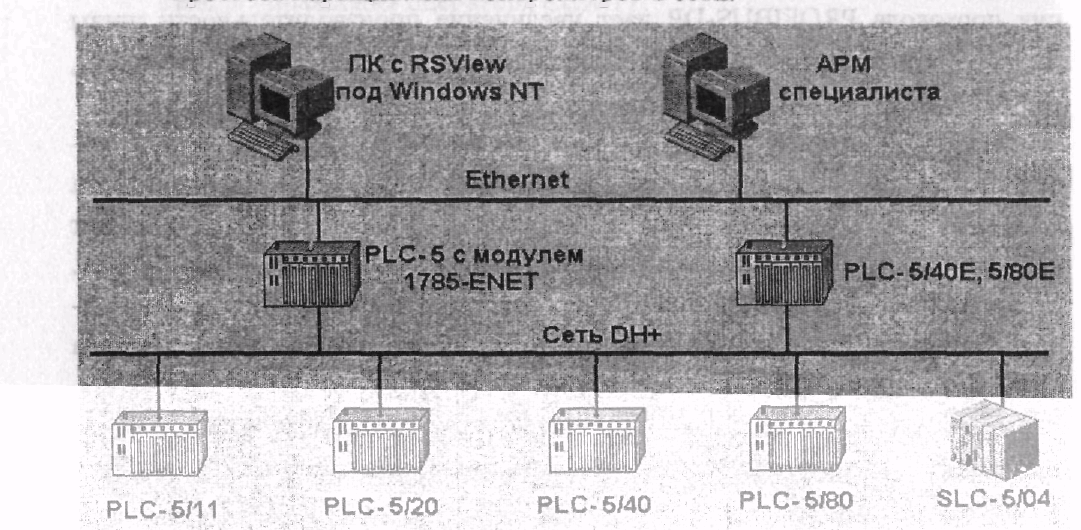
Рис.5. Контроллеры Allen-Bradley в сети DH+.
Сеть Genius фирмы GE Fanuc
Сеть Genius фирмы GE Fanuc является одним из примеров сети управления и предназначена для объединения в законченную систему контроллеров GE Fanuc серий 90-70 и 90-30. удаленной периферии Genius и Field Control (рис. 1). Взаимодействие различных устройств с сетью Genius осуществляется посредством контроллеров шины Genius (GBC), интерфейсных модулей (GCM), блоков интерфейса с шиной Genius (BUI).
Физически устройства объединяются в сеть экранированной витой парой. Сеть имеет топологию "шина", к которой может быть подключено до 32 устройств. Максимальная длина шины составляет 2,3 км при скорости обмена 38,4 Кбод. Максимальная скорость передачи данных 153,6 Кбод достигается при длине линии до 600 м.
Сеть Genius поддерживает передачу как глобальных данных (Global Data) так и дейтаграмм (при каждом акте сканирования).
Для обмена данными по Global Data каждому входящему в состав сети контроллеру выделяется участок адресного пространства. В этот участок он передает данные, указанные при конфигурировании его контроллера шины.
Передача данных осуществляется без указания контроллера, который должен их получить. Этот участок доступен всем подключенным к шине PLC только для чтения. Таким образом, для всей сети создается единый набор данных, используемый для обмена. Один контроллер шины обеспечивает прием/передачу до 128 байт данных от каждого из узлов.
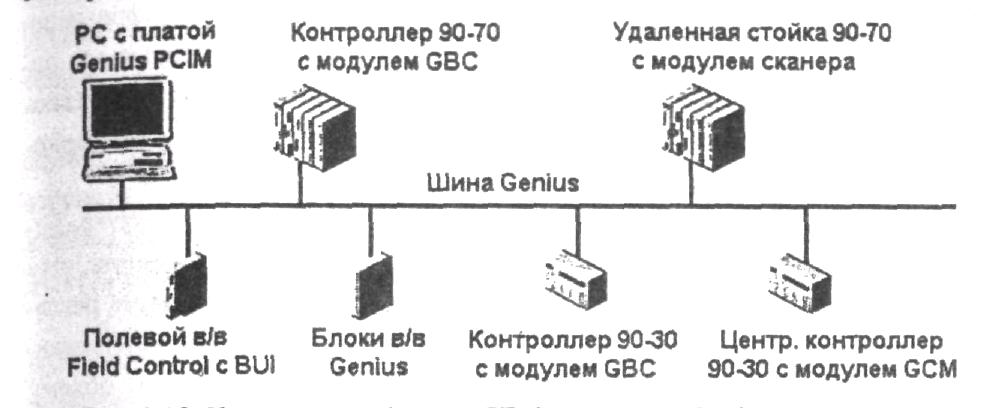
Рис 1. Контроллеры фирмы GE Fanuc в сети Genius.
Дейтаграмма (Datagram) представляет собой направленную посылку данных от одного контроллера к другому. Прием/передача дейтаграмм происходит под управлением программы пользователя. Момент отправки дейтаграммы может быть задан с требуемой периодичностью или по наступлению какого-либо события.
В последние годы проявилась тенденция применения в системах управления технологий сквозного сетевого доступа: от мощных супервизорных компьютеров и многофункциональных контроллеров до интеллектуальных полевых устройств (датчики, исполнительные устройства и т. п.). При этом такая связь должна удовлетворять всем современным требованиям по функциональности, надежности и открытости. Рассмотренные выше сети и протоколы не предназначены для непосредственного взаимодействия с устройствами полевого уровня.
Контроллеры VersaMax (сеть управления)
Оборудование VersaMax может быть использовано для построения небольших (до 256 точек) локальных систем управления, а также для расширения существующих систем.
Конструкция системы разработана с учетом современных требований к гибкости, возможности расширения и удобства монтажа. Система состоит из блоков, не имеющих общего каркаса и монтируемых на DIN-рейке. Первый блок на рейке - CPU с подключенным к нему блоком питания. Справа от CPU устанавливаются шасси для модулей ввода/вывода, которые соединяются друг с другом и с CPU встроенными разъемами. К одному CPU можно подключить до 8 шасси. В каждое шасси устанавливается один модуль ввода/вывода. В эти же шасси могут быть
установлены и коммуникационные модули. Провода от датчиков и ИУ подключаются к клеммнику, входящему в состав шасси. Таким образом, имеется возможность замены модулей без отсоединения кабелей.
Световые индикаторы контроллера позволяют отслеживать ошибки в системе и состояние входов/выходов.
Характеристика контроллера
Память программ - 12К (12288 байт).
Скорость выполнения двоичных операций - 1.8 мс/К.
Операции с плавающей запятой - да.
ПИД-регулирование - да.
Порты - RS-232 и RS-485.
Протоколы - SNP slave, Modbus RTU slave, Serial I/O.
Батарейка часов реального времени - да.
Система с одним контроллером VersaMax (IC200CPU001) поддерживает до 256 вводов/выводов. Система VersaMax максимально может поддерживать:
дискретные в/в - 2048/2048;
аналоговые в/в - 128/128 слов.
В системе VersaMax имеется широкая номенклатура модулей ввода/вывода. Для создания удаленных узлов (станций) ввода/вывода на 256 переменных могут быть использованы дискретные, аналоговые, смешанные и специальные модули ввода/вывода.
Каждая станция VersaMax удаленного ввода/вывода может управляться либо CPU контроллера VersaMax либо другими контроллерами посредством коммуникационных модулей.
Коммуникационные возможности
CPU контроллера имеет два последовательных программно-конфигурируемых порта RS-232 и RS-485 (протоколы - SNP slave и Modbus RTU slave).
Использование интерфейсного модуля Profibus slave в контроллере VersaMax делает его подчиненным в сети Profibus-DP.
Коммуникационный модуль Profibus - DP slave (IC200BEM002) имеет стандартный порт RS-485 (рис. 2,4.3). Установка адреса производится переключателями.
Характеристика модуля:
поддерживает максимум 392 бита (от 1 до 244 ввода или 244 вывода);
адресное пространство - 1 - 125 (сеть поддерживает 32 станции без повторителей, 125 - с повторителями;
скорость - от 9.6 Кбод до 12 Мбод;
топология сети - шина с терминаторами на обоих концах;
физическая линия - витая пара.
Рис. 2. Контроллеры VersaMax в сети Profibus - DP.
Использование интерфейсного модуля DeviceNet Master (IC200BEM103) в контроллере VersaMax делает его мастером в сети DeviceNet. Модуль поддерживает и равноправный обмен информацией.
Характеристика модуля:
поддерживает до 40 подчиненных устройств;
поддерживает до 128/128 вводов/выводов;
адресное пространство - от 0 до 63;
скорость обмена- 125,250,500 Кбод;
топология сети - шина.
Для расширения емкости существующей системы управления по вводу/выводу можно использовать станции ввода/вывода VersaMax (VersaMax I/O). С этой целью в станцию VersaMax I/O вставляют соответствующий интерфейсный модуль (для взаимодействия с сетями Genius, Profibus-DP, DeviceNet).
Мост VersaMax - Genius (IC200GBI001) обеспечивает интерфейс VersaMax с хост-ПЛК или PC по сети Genius (рис. 2.4.4). Модуль может быть использован в резервированной сети и при резервированном CPU. Имеет встроенный источник питания. Адресация и скорость обмена
устанавливаются переключателями.
Характеристика модуля:
поддерживает до 8 модулей в станции;
сканирует 128/128 в/в;
адресное пространство - от 0 до 31;
скорость - 153.6Кбод, 76.8 Кбод, 38.4 Кбод;
топология - шина.
Рис. 3. Контроллер VersaMaxs сети Genius.
Интерфейсный модуль Profibus - DP мастер/починенный (IC200PB
I001)имеет встроенный стандартный RS-485, встроенный источник питания. Адресация и скорость обмена устанавливаются переключателями. Характеристика модуля:
поддерживает до 8 модулей в станции;
поддерживает максимум 375 бит (от 1 до 244 ввода или 244 вывода);
- адресное пространство - от 1 до 125 (сеть поддерживает 32 станции без повторителей, 125 - с повторителями);
скорость - от 9.6 Кбод до 12 Мбод;
топология - линейная шина;
физическая линия - витая пара.
Интерфейсный модуль DeviceNet (IC200DBI001) обеспечивает интерфейс VersaMax с сетью DeviceNet. Модуль имеет встроенный источник питания.
Характеристика модуля:
поддерживает до 8 модулей в станции;
поддерживает 130/130 дискретных вводов/выводов;
адресное пространство - от 0 до 63 (сеть поддерживает до 63 устройств);
скорость - 125 Кбод, 250 Кбод, 500 Кбод;
физическая линия - витая пара;
топология - шина.
Контроллеры VersaMax
Программное обеспечение GE Fanuc
Базовым средством интегрирования контроллеров GE Fanuc в систему управления технологическим процессом является пакет программ Logicmaster. Модули GE Fanuc не имеют конфигурационных переключателей и перемычек,
все конфигурирование контроллера выполняется при помощи Logicmaster. Это же средство используется для программирования контроллеров, диагностики их технического состояния и отладки программ.
Для программирования контроллеров GE Fanuc обычно используется язык релейно-контактной логики. Logicmaster поддерживает структурированное написание программ с использованием процедур, присвоение символьных имен входам, выходам и ячейкам памяти, комментарии к строкам программы. Если задача управления требует выполнения сложных логических операций или расчетов, возможно программирование на языках С и State Logic.
При работе с контроллерами в качестве устройства программирования ч используется портативный компьютер - Notebook с Logicmaster, подключаемый к контроллеру через последовательный порт.
SCADA - система Cimplicity
Cimplicity - один из старейших HMI- продуктов на мировом рынке. Этот программный продукт работает в среде операционных систем UNIX VMS, HP UX на компьютерных платформах IBM, VAX, DEC.
Графика Cimplicity позволяет создавать динамические экраны, представляющие технологический процесс. Панели инструментов предоставляют возможность разработчику выравнивать, вращать, изменять контуры, рисовать и создавать группы объектов, редактировать копировать и стирать, передвигать объекты по экрану.
В системе имеется библиотека графических объектов для различных отраслей промышленности.
Графика Cimplicity поддерживает стандарты Microsoft OLE и. Это позволяет включать в графические экраны таблицы или графики из Excel, рапорты из баз данных SQL и Access, картинки bitmap, видео- и аудиоклипы, графики, алармы и т. д. из других приложений пакета.
В пакете Cimplicity предусмотрена система генерации и управления алармами. Окна алармов можно настраивать и встраивать в графический экран. Имеется возможность изменять шрифты, размеры окна, стили и тексты алармов.
Тренды также могут встраиваться в графический экран (стандарт OCX). Количество графиков на один объект трендов не ограничено. Причем тренд может иметь сразу несколько источников поступления данных, включая текущую информацию и информацию, сохраненную в файле. Для каждого графика возможен свой масштаб. Предусмотрена возможность конфигурирования трендов в режиме исполнения.
В качестве языка для написания собственных программных модулей может быть использован Visual Basic. Пользователю предоставлена возможность создавать программные блоки, базирующиеся на системных событиях, алармах, переменных из базы данных или конкретных действий оператора.
Для поддержания обмена с внешними базами данных используется механизм ODBC.
Cimplicity предоставляет возможность горячего резервирования, которая обеспечивает автоматическое переключение с первичной системы на вторичную в случае отказа.
Переменные, алармы и другие параметры сохраняются синхронно в двух системах, уменьшая тем самым время реакции и восстановления. Для OS Windows NT время перехода на резервный сервер составляет 10 миллисекунд.
Панель управления переменными обеспечивает пользователя списком переменных в системе. С помощью этой панели можно организовать фильтрацию переменных, сортировку в зависимости от имени, устройства поступления, ресурсов.
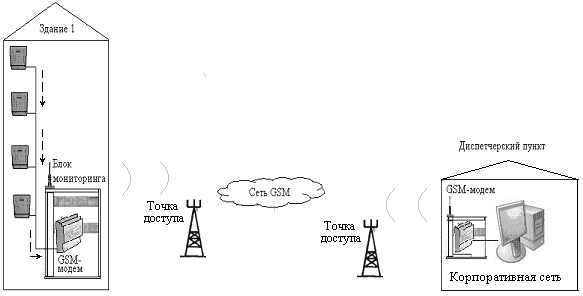
Корпоративная сеть сбора данных на основе беспроводных технологий
Современные системы контроля имеют распределенный характер и имеют иерархическую структуру.
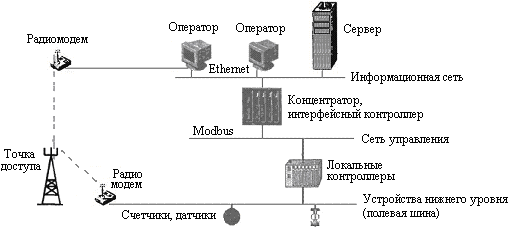
Территориально-распределення сеть объектов

Разработка системы сбора данных
Для организации связи между удаленными объектами применяются GSM-модемы. Канал передачи информации - каналы цифровой сотовой сети радиосвязи стандарта GSM.
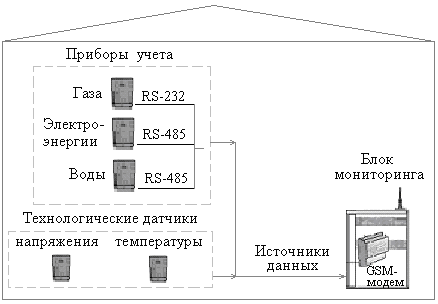
Проведение схемы подключения счетчиков
5
Выбор аппаратных средств доступа к данным
Отечественные модемы RIT35 - это внешние GSM-модемы 900/1800 МГц, разработанные на базе модулей Siemens, Motorola (GPRS). Имеют встроенное гнездо sim-карты, блок питания и интерфейс RS-485.

Блоки мониторинга RIT35 содержат GSM-модем, контроллеры, аккумулятор. Блоки позволяют создавать полноценные системы мониторинга удаленных объектов. Это системы учета электроэнергии, воды, газа, тепла.

Лист 6