

2.4. Контроллеры и сетевые комплексы ge Fanuc
2.4.1. Контроллеры серии 90-30
ПЛК серии 90-30 фирмы GE Fanuc - это семейство контроллеров, специальных модулей и устройств ввода/вывода, адаптированных для различных применений: от простой замены реле до систем автоматизации среднего уровня мощности.
Модели 311,313/323, 331
Эти модели ПЛК обладают возможностями средней мощности. Модели 311 и 313 смонтированы на 5-ячеечной базовой плате, обеспечивающей до 160 вводов/выводов. Модель 313 имеет большую память по сравнению с 311.
Модель 323 смонтирована на базовой плате с 10 ячейками и обеспечивает до 320 в/в. CPU имеет те же возможности, что и 313.
ПЛК модели 331 применяется в проектах, требующих большого числа вводов/выводов. Процессор поддерживает функцию расширенного ввода/вывода. Более широкий набор возможностей центрального процессора обеспечен большей по сравнению вышеописанными моделями памятью,
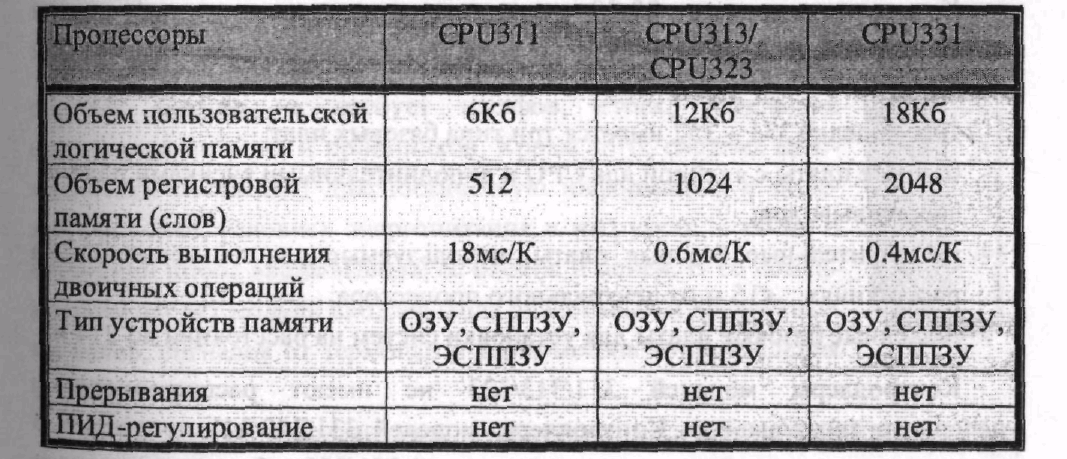 Характеристика
процессоров
Характеристика
процессоров
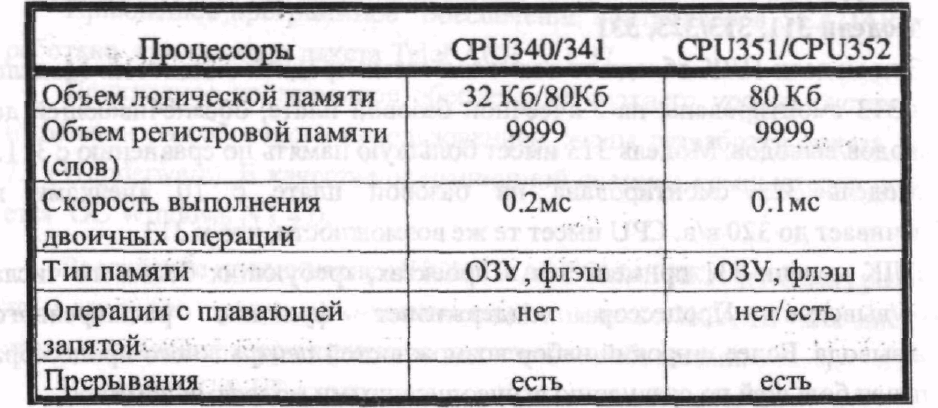
• Модели 340/341 и
351/352 Модели 340/341 - это ПЛК с увеличенным
объемом памяти и повышенным быстродействием. Процессоры
этих моделей имеют
функцию прерывания через определенное
время (>1мс),
что позволяет решать задачи высокоскоростного
распределенного управления процессами.
повышенным быстродействием. Процессоры
этих моделей имеют
функцию прерывания через определенное
время (>1мс),
что позволяет решать задачи высокоскоростного
распределенного управления процессами.
CPU модели 351 - один из самых быстродействующих центральных процессоров. Имеет 4 встроенных процессора для одновременного решения нескольких задач с целью повышения пропускной способности.
Модель 352 обладает возможностью выполнения операций с плавающей запятой со скоростью от 2 до 4 мкс.
Характеристика процессоров
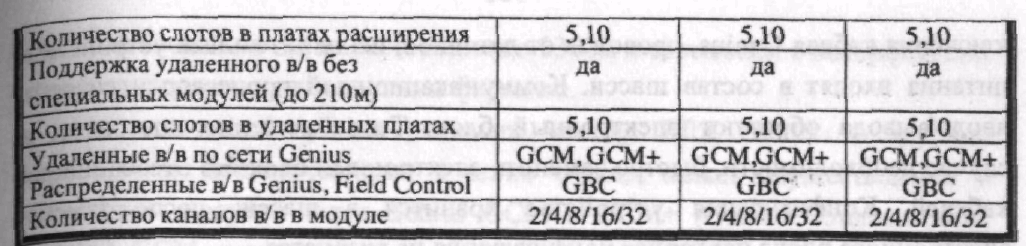
Ввод/ вывод.
Контроллеры серии 90-30 наряду с локальным вводом/выводом поддерживают расширение ввода/вывода, удаленный и распределенный ввод/вывод.
Для моделей 331 - 352 имеется три типа базовых плат:
базовые платы с ячейкой для CPU и дополнительными ячейками для вводов/выводов;
расширительные базовые платы, используемые для их установки на расстояниях <15 м от центрального процессора;
- удаленные базовые платы для установки систем на расстоянии до 214 м.
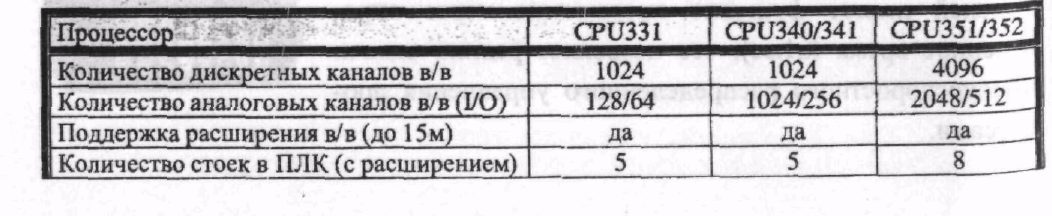
Контроллеры моделей 311/313/323 не имеют расширенного и удаленного ввода/вывода.
Контроллеры моделей 331/340/341 допускают 5 расширительных плат, а контроллеры моделей 351/352 - 8 расширительных плат. Фирма предлагает кабели стандартных длин для их подключения к базовой плате с CPU.
Модули ввода/вывода серии 90-30
Модули ввода обеспечивают интерфейс между ПЛК и внешними источниками входных сигналов, а модули вывода - между ПЛК и внешними выходными устройствами. GE Fanuc предлагает целый ряд модулей, поддерживающих различные диапазоны и виды напряжений, имеющих различную токовую нагрузку, изоляцию. Модули ввода/вывода имеют различную плотность - 8, 16, 32 точки. Все модули ввода/вывода оснащены
светодиодными индикаторами, выделяющими каждую точку на модуле и со стороны ввода, и со стороны вывода.
Для аналоговых модулей в процессоре выделяется свой объем памяти.
При каждом сканировании производится автоматическое обновление данных. Все модули имеют программное конфигурирование.
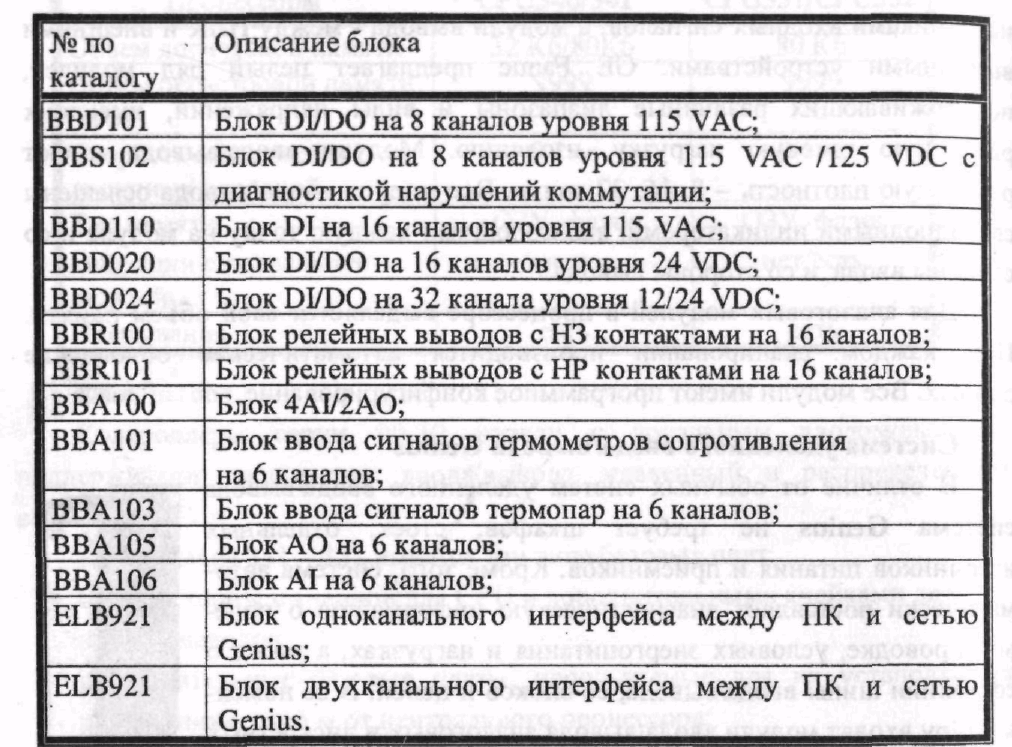
В отличие от
обычных систем удаленного ввода/вывода
система Genius
не требует шкафов, стоек, отдельных
источников питания и приемников. Кроме
того, система автоматически поставляет
диагностическую информацию о полевой
проводке, условиях энергопитания и
нагрузках, а также о состоянии шины
ввода/вывода, ее блоков и цепей. В ее
номенклатуру входят модули ввода/вывода
аналоговых и дискретных сигналов,
сигналов от термопар и термометров
сопротивления и ряд других.

Допускается использование аналоговых модулей ввода/вывода с сигналами от 0 до 24 мА, что дает возможность работать, в частности, с сигналами 0-5 мА при погрешности, приемлемой в большинстве случаев.
Дискретные модули поддерживают диагностику состояния входных/выходных цепей, имеют встроенную защиту от короткого замыкания.
Модуль высокоскоростного счетчика работает с импульсами напряжением от 5 до 30 В и частотой до 200 кГц.
Конструктивно система ввода/вывода Genius представляет собой сборку из двух составляющих - шасси и электронного блока. Клеммы для подключения кабеля Genius, проводов от датчиков, исполнительных устройств и питания входят в состав шасси. Коммуникационный процессор и система ввода/вывода образуют электронный блок.
Такое решение позволяет, в случае необходимости, быстро заменить электронный блок без отсоединения кабелей. Конфигурация устройства хранится в шасси; после замены электронного блока повторная конфигурация не требуется.
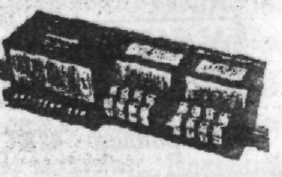
Модули системы ввода/вывода Genius
Взаимодействие системы ввода/вывода Genius с центральным процессором осуществляется посредством контроллера шины Genius (Genius Bus Controller - GBC). Этот модуль объединяет в себе контроллер связи и одноканальный контроллер распределенных вводов/выводов. Модуль GBC занимает одну ячейку ПЛК и конфигурируется при помощи программного обеспечения Logicmaster 90-70. Поддерживает до 32 устройств в локальной сети Genius. В состав* одного PLC может быть включено несколько контроллеров шины GBC, каждый из которых поддерживает отдельный сегмент сети. При использовании одноранговой передачи информации контроллер может служить узлом связи для соединения с другими устройствами через шину Genius. Предоставляет возможность удаления
устройств ввода/вывода на расстояние до 2300м и совместим с интерфейсами устройств, производимых другими фирмами.
Автоматический обмен данными между ПЛК 90-30 и другими устройствами, подключенными к шине Genius, может осуществляться и посредством модулей связи Genius GCM и GCM+ (Genius Communication Module,). GCM может поддерживать в локальной сети Genius до 8 устройств, а GCM+ до 32 устройств. Каждый модуль может размещаться в любой из трех стандартных стоек. В стойку можно установить только один GCM, но установленного предельного числа модулей GCM+, обслуживаемых одним ПЛК, не существует.
Модули GCM и GCM+ являются полностью программно-конфигурируемыми. Подключение к шине Genius осуществляется при помощи двухпроводного кабеля с разъемами на каждом конце. Модуль оснащен двумя светодиодными индикаторами: один показывает, что модуль включен и работает, другой - что он сконфигурирован и ведет передачу или прием. GCM+ поддерживает мониторинг данных при помощи ПК, мониторинг блоков ввода/вывода Genius, одноранговую связь и связь по схеме "ведущий/ведомый" с имитацией удаленных вводов/выводов.
Система ввода/вывода Field Control
Field Control объединяет децентрализованную систему ввода/вывода и децентрализованную систему управления в единое недорогое модульное изделие. Устройство приводит к стандартному виду сигналы при вводе в систему управления или выводе из нее. Field Control имеет модульную конструкцию и состоит из блока интерфейса шины (Bus Interface Unit - BIU), блока полевых контактных устройств (шасси ввода/вывода) и полевых модулей ввода/вывода. В состав BIU входит интерфейс для соединения с такими полевыми хост-шинами, как шина Genius и FIP. Универсальные блоки полевых контактных устройств, которые могут устанавливаться на DIN-рейке или на панели, имеются в различных конфигурациях (по применению). Один блок интерфейса шины может поддерживать до 4 блоков контактных устройств или 8 модулей ввода/вывода, обеспечивая в сумме 128 точек.
В номенклатуру Field Control также входит Micro Field Processor (MFP) -модуль процессора, выполняющий логическую обработку сигналов ввода/вывода по программе пользователя, что позволяет реализовать управление подключенным к устройству Field Control агрегатом без участия CPU контроллера, Модуль MFP устанавливается в шасси ввода/вывода.
Наряду с BIU, предназначенными для связи по сети Genius с контроллерами GE Fanuc, выпускаются BIU для работы в других сетях (Profibus-DPt WorldFIP, Interbus) что позволяет включать модули ввода/вывода Field Control в состав АСУТП на базе контроллеров третьих фирм.
Устройства системы FieldControl
Контроллер GBC проводит асинхронное сканирование блоков ввода/вывода системы Field Control и при каждом акте сканирования передает данные ввода/вывода на центральный процессор через объединительную плату стойки серии 90-30.