

1.2Привод главного движения станков с чпу
Требования к приводу главного движения станков с ЧПУ:
жесткая механическая характеристика;
малое время переходных процессов;
малые потери мощности;
постоянная мощность на выходном звене независимо от его скорости;
возможность автоматического изменения скоростей под нагрузкой или в процессе настройки.
Наиболее распространенные типы приводов главного движения станков с ЧПУ:
электромеханический привод со ступенчатым регулированием с асинхронным нерегулируемым или многоскоростным двигателем и коробкой скоростей (токарные, токарно-револьверные, сверлильные, фрезерные и др. станки малых и средних размеров с коротким циклом обработки или использующие инструменты, размеры которых образуют геометрический ряд);
электромеханический привод с бесступенчатым или комбинированным регулированием с регулируемым электродвигателем постоянного тока или частотно-регулируемым асинхронным электродвигателем и — при смешанном регулировании — ступенчатой коробкой скоростей (токарные, многооперационные, многоцелевые и др. станки с широким диапазоном регулирования частоты вращения шпинделя);
гидравлический с бесступенчатым регулированием (гидрофицированные фрезерные, многоцелевые, агрегатные, шлифовальные и др. станки).
1.2.1Кинематический расчет привода главного движения со смешанным регулированием
Приводы с бесступенчатым регулированием и электродвигателями постоянного тока являются основными для станков с ЧПУ.
При регулировании частоты вращения двигателя изменяются развиваемый момент MЭ и мощность NЭ. Условно диапазон регулирования двигателя можно разделить на три зоны:
от минимальной частоты вращения двигателя nЭmin до номинальной nЭн — с постоянным крутящим моментом (MЭ=const) и изменяющейся мощностью (NЭ=var);
от номинальной частоты вращения двигателя nЭн до максимальной nЭmax — с постоянной мощностью (NЭ=const) и изменяющимся крутящим моментом (MЭ=var);
от частоты вращения двигателя nЭmax до n'Эmax — с изменяющимися (снижающимися) мощностью (NЭ=var) и крутящим моментом (MЭ=var).
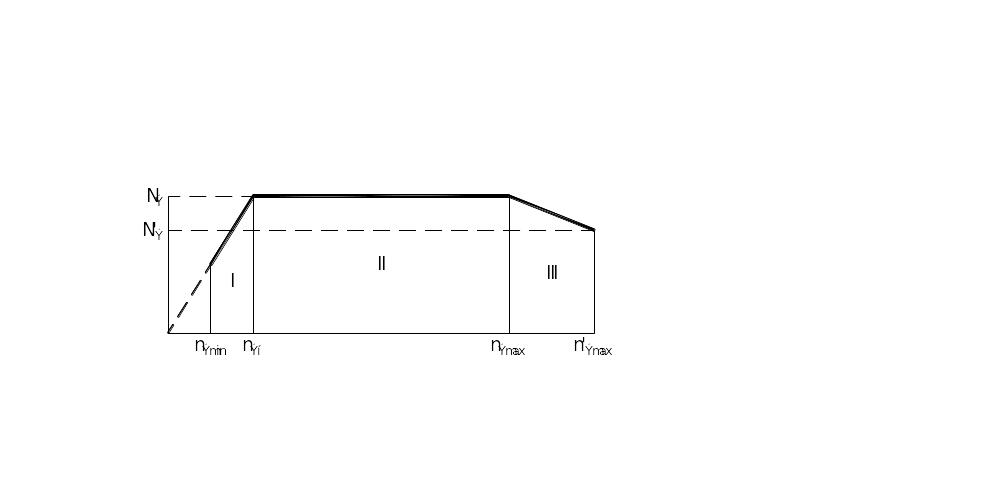
Рисунок 8
Обычно в приводах главного движения станков с ЧПУ используется двухзонное (в зонах I и II) регулирование приводного двигателя, однако использование регулирования в зоне III позволяет полнее использовать возможности двигателя, так как в большинстве металлорежущих станков высокие частоты вращения на выходе привода соответствуют работе на чистовых режимах, — со сравнительно малыми нагрузками, при которых не требуется развивать полную мощность двигателя.
Если диапазон регулирования двигателя недостаточен для обеспечения бесступенчатого регулирования частоты вращения (в том числе с использованием полной мощности) на выходе привода, применяется привод со смешанным электромеханическим «бесступенчато-ступенчатым» регулированием. Такой привод представляет собой комбинацию регулируемого электродвигателя и механической коробки скоростей с диапазонами регулирования соответственно RЭ и RКС. Общий диапазон регулирования такого привода Rn разделен на несколько поддиапазонов, количество которых равно числу ступеней Z механической коробки скоростей. В каждом из этих поддиапазонов регулирование частоты вращения осуществляется бесступенчато приводным двигателем.
Исходные данные для расчета:
пределы частот вращения шпинделя, мин-1: nmin, nmax;
пределы частот вращения шпинделя с использованием полной мощности, мин-1:
nNmin, nNmax;
параметры регулируемого электродвигателя (выбираются по каталогу):
частота вращения, мин-1:
номинальная nЭн;
максимальная nЭmax, n'Эmax.
Диапазон регулирования привода
![]()
Диапазоны регулирования привода в зонах I, II, III:
![]()
![]()
![]()
Диапазоны регулирования двигателя в зонах II, III:
![]()
![]()
Число ступеней коробки скоростей, обеспечивающее бесступенчатое регулирование привода в зоне II (с использованием полной мощности двигателя) предварительно принимается равному большему из значений, рассчитанных по формулам
![]()

Округление расчетного значения Z до целого следует производить в большую сторону.
Знаменатель геометрического ряда коробки скоростей назначается в интервале
![]()
Значение φ, принимаемое для коробки скоростей в данном случае, может отличаться от рекомендуемых нормалью станкостроения значений φ для ступенчатых приводов. Верхний предел φ обеспечивает максимальный диапазон регулирования привода в зоне II RnII. Это позволяет создать определенный резерв роста производительности обработки на данном станке, так как фактическое значение RnII в этом случае обычно превышает требуемое. Однако при больших значениях φ могут возникнуть определенные затруднения с обеспечением компактности зубчатых передач привода, что может потребовать применения в коробке скоростей особых видов структур (см. ниже) и усложнения привода. Нижний предел φ позволяет при обеспечении заданного диапазона RnII использовать наиболее компактный привод.