

6. 7. Понятие плк. Структура и основные компоненты плк.
ПЛК является основным средством автоматизации на нижнем уровне управления технологическими объектами и процессами.
Управляющие контроллеры широкого применения выпускает большое количество фирм, среди которых есть и такие известные, как Siemens, Turck, Omron, PEP Modular Computers (IUC), Advantech (ADAM) и т. д. Существуют крупные производители контроллеров и в СНГ, выпускающие серии контроллеров "МикроДАТ", "Ломиконт", SMART-КП и другие.
Обобщенная структурная схема контроллера:
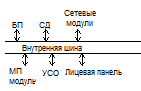
МП модуль – микропроцессорный модуль. Состоит из микропроцессора, ОЗУ, ПЗУ (для OC, фирменного ПО и библиотеки алгоритмов), ППЗУ (для программ пользователя);
УСО – устройство связи с объектом – это обычно аналого-цифровые преобразователи (АЦП и ЦАП, гальваническая развязка);
СД – модуль самодиагностики, который осуществляет контроль и диагностику элементов контроллера в процессе его работы и сигнализирует при обнаружении неисправностей;
Сет модули – для взаимод-я с пром сетью.
Лицевая панель – с ее помощбю вып программ-е контроллеров.
Внутриблочная шина является одним из основных архитектурных решений для систем промышленной автоматизации – магистрально-модульная архитектура, в которой различные внешние блоки связываются между собой через общую магистраль.
Виды ВБШ.
- шины VME (половина выпускаемых контроллеров);- ПК архитектуры (включая ISA, EISA, Multibus I и II, PC/104) (около трети);- шина PCI;
- на встроенные материнские платы.
Внутри блочные шины постоянно развиваются. Так на данный момент есть стандарты VME64, PCI64 (64-битные версии).
Обычно все контроллеры имеют резервный источник питания, поддерживающий его работоспособность во время перерывов в электроснабжении, обычно малогабаритные аккумуляторы.
Преимущества контроллеров над обычными ЭВМ.
К-р не требует знания обычных яз программ-я. К-ры программ-ся на спец языках, которые максимально упрощены и приближены к понятиям и операциям, получившим распространение в СА. В частности, в программное обеспечение контроллера обычно зашивается библиотека стандартных алгоритмов, для которых заранее написаны программы (например, ПИ, ПИД-регуляторы и т.д.). Задача пользователя состоит в том, что использую эти алгоритмы, получить решение задачи.
17. Логическое упр-е. Цели и задачи логического управления. Структура улу.
Логическим управлением называют управление с помощью дискретных сигналов, принимающих конечное число фиксированных значений, и осуществляемое в соответствии с заданным алгоритмом управления. Обычно используют двухуровневые сигналы, обозначаемые условно «0» и «1». Логическое управление используется для решения следующих задач автоматизации:
1)пуска и остановки технологических объектов с помощью некоторой последовательности действий;
2)перехода с одного режима на другой;
3)для управления периодическими процессами, когда необходимо циклическое выполнение некоторой последовательности дейстий;
4)защиты технологических объектов в аварийных и предаварийных ситуациях.
Автоматизация логического управления осуществляется с помощью аппаратных и программных средств, получивших название устройств или систем логического управления (УЛУ или СЛУ).
Структура устройств логического управления (УЛУ).
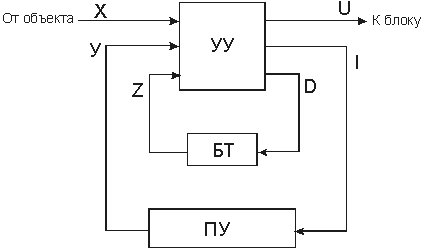
Структурная схема устройства логического управления
На схеме приняты следующие обозначения для блоков и сигналов: УУ - управляющее устройство или автомат;
БТ – блок таймеров, предназначенный для организации всех задержек времени, требуемых в алгоритме управления; ПУ – пульт управления, предназначенный для взаимодействия с человеком – оператором.
Х – множество сигналов от автоматических датчиков объекта; U – множество управляющих сигналов, поступающих на двухпозиционные и трехпозиционные исполнительные механизмы объекта (например, клапаны, задвижки и т.п.); Y – множество сигналов от кнопок и ключей ручного управления, находящихся на пульте управления; I – множество сигналов, поступающих на пульт управления с целью включения/выключения элементов световой и звуковой сигнализации; D – множество сигналов, управляющих таймерами в блоке БТ, т.е. включающих таймеры для отсчета требуемых выдержек времени; Z – множество сигналов из блока таймеров, свидетельствующих об окончании требуемых выдержек времени.
При построении устройств логического управления в блоке БТ и ПУ обычно используются стандартные элементы автоматики, выпускаемые промышленностью, такие как реле времени, таймеры, светодиодные индикаторы и т.п.