

3.3. Составление передаточной функции системы
Имеем структурную схему системы электропривода постоянного тока с тиристорным управляемым выпрямителем (двигатель представлен колебательным звеном):

Рис. 8 Расчетная схема электропривода.
Составим передаточную функцию разомкнутой системы:
Wраз(p)= Wу(p)Wтп(p)Wд(p)Wocс(p)
Получим функцию вида:

где
![]() -
-
3.4. Проверка устойчивости системы электропривода.
Для расчета устойчивости системы регулирования применим метод построения логарифмических частотных характеристик. Необходимым и достаточным условием устойчивости по Найквисту является пересечение ЛАЧХ разомкнутой системы оси абсцисс раньше, чем ЛФЧХ пересечет линию, соответствующую ее фазовому сдвигу –π.
ЛАЧХ
разомкнутой системы:
ЛФЧХ
разомкнутой системы:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
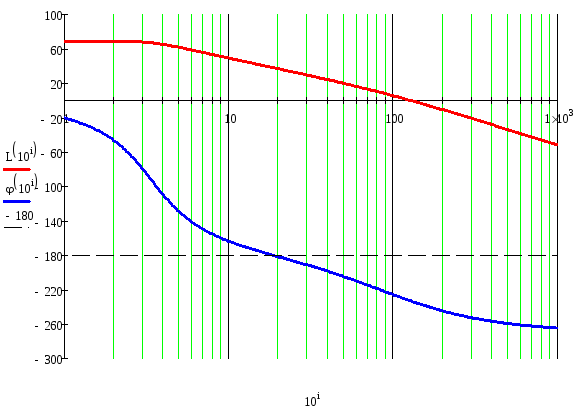
Из построенных ЛАЧХ и ЛФЧХ видно, что система не устойчива, т.к. не удовлетворяет критерию устойчивости Найквиста. Поэтому будем вводить корректирующие устройства.
3.5. Синтез корректирующего устройства
Корректирующее устройство должно обеспечивать отсутствие статической ошибки регулирования, ограничить (не более заданного) перерегулирование и время регулирования.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
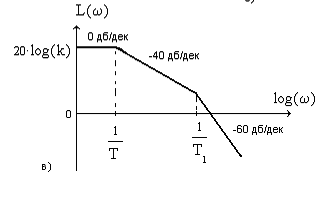
Для нашей передаточной функции системы асимптотическая амплитудно-частотная логарифмическая характеристика будет иметь вид:
По номограммам Солодовникова находим:
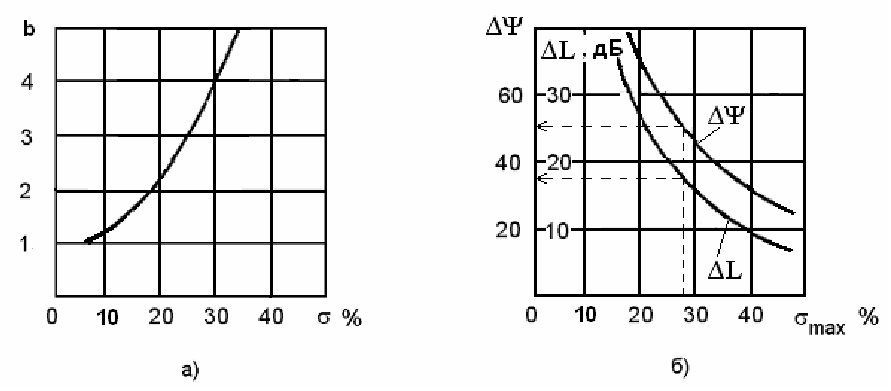
Рис. 10 Номограммы для определения частоты среза (а)
и частоты сопряжения (б).
Частота
сопряжения:
Необходимый
запас устойчивости
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Строим графики АЛАЧХ разомкнутой системы, желаемой системы и АЛАЧХ корректирующего устройства.
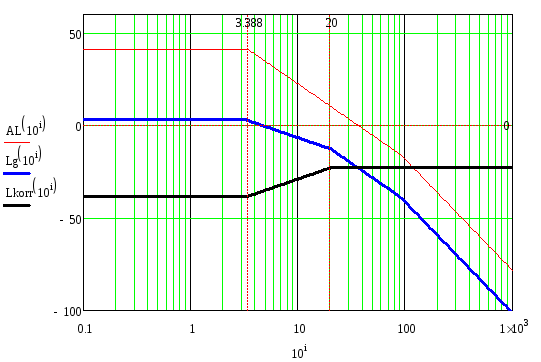
Рис. 11 АЛАЧХ скорректированной системы.
П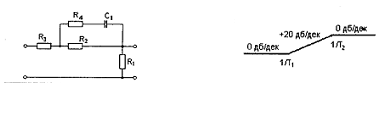 о
виду АЛАЧХ скорректированной системы
применим следующее корректирующее
устройство:
о
виду АЛАЧХ скорректированной системы
применим следующее корректирующее
устройство:
Рис. 12 схема корректирующего устройства
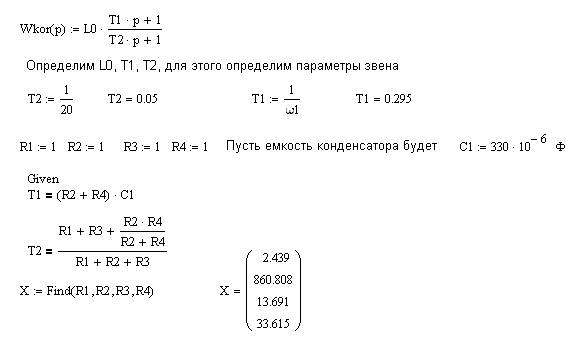
Подберем
резисторы (ближайшим приближением) по
ряду Е24
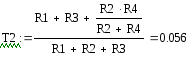
Пересчитаем
T1 и T2
Получаем
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Строим ЛАЧХ и ЛФЧХ системы с внесением в нее корректирующего звена:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
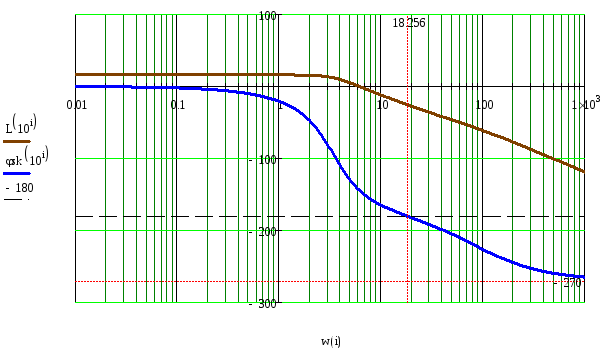
Рис. 13 ЛАЧХ и ЛФЧХ скорректированной системы
На рисунке представлено построение ЛАЧХ и ЛФЧХ нашей системы, введя в нее корректирующее устройство, рассчитанное выше. Из данных характеристик по критерию Найквиста находим запасы по амплитуде и по фазе.
Запас
по амплитуде:
Запас
по фазе:
![]()
![]()
Как видим, они удовлетворяют нашим требованиям. Значит можно перейти к построению переходного процесса в системе электропривода.