

37. Надежность информационного звена человек-оператор
Среди характеристик человека-оператора, с позиций данного курса, особую значимость имеет его надежность. С одной стороны, оператор, как звено по обработке информации, включен в контур управления и характеризуется определенной надежностью. В этом плане обеспечение высокой надежности работы оператора, как и всей автоматизированной системы, является одной из важнейших задач инженерной психологии. Ее решение составляет существенное условие повышения качества и эффективности функционирования АСОИУ. С другой стороны, человек-оператор принципиально отличается от прочих звеньев системы своими уникальными способностями. Так, если скорость поступления сигналов превышает максимально допустимую частоту информационного технического звена, последнее прекращает процесс нормального функционирования. В том случае, если скорость поступления входной информации превышает пропускную способность оператора, происходит его адаптация к более интенсивной деятельности (вплоть до увеличения скорости) и только спустя некоторое время — отказ от выполнения задачи. Причем оператор, как интеллектуальное звено системы, осуществляет логически осознанную фильтрацию входной информации с целью сохранения своей работоспособности.
Человек-оператор способен фильтровать перемежающиеся отказы аппаратно-программных средств АСОИУ, что приводит к существенному повышению надежности функционирования системы в целом.
При определении надежности звена человек-оператор исходят из известного постулата: показатели надежности должны быть едиными для всех звеньев АСОИУ. Поэтому создаваемые методики оценки надежности базируются на использовании показателей надежности, математического аппарата и методов расчета, разработанных в современной теории надежности технических устройств. При этом показатели надежности человеко-машинных комплексов включают в явном виде показатели надежности ее отдельных информационных звеньев: человека и аппаратно-программных средств.
Под надежностью оператора понимается его свойство качественно выполнять функции управления в течение определенного времени при заданных условиях. В основе оценки надежности оператора лежит понятие ошибки, под которой подразумевается любое нарушение предписанного оператору алгоритма деятельности, повлекшее получение ошибочных результатов или отказ от выполнения соответствующих действий. В общем случае ошибками являются: невыполнение требуемого или выполнение лишнего (несанкционированного) действия, нарушение последовательности выполнения действий, неправильное или несвоевременное выполнение требуемого действия. Совершаемые оператором ошибки различаются по своим последствиям. Они могут быть разными для человека-оператора, аппаратно-программных средств и системы в целом (рис. 9.14). В зависимости от этого ошибки могут быть неаварийными и аварийными. Последние непосредственно снижают надежность оператора и компьютерного комплекса в целом. Обычно надежность оператора характеризуется показателями безошибочности, готовности, восстанавливаемости и своевременности.
Основным показателем безошибочности является вероятность безошибочной работы человека-оператора. Вероятность может вычисляться как на уровне отдельной операции, так и на уровне алгоритма его деятельности в целом. Для типовых, часто повторяющихся операций в качестве показателя безошибочности может использоваться также интенсивность ошибок. Эти показатели определяются, как правило, в расчете на одну выполненную операцию (алгоритм). По статистическим данным, они могут быть вычислены следующим образом:
где Р — вероятность безошибочного выполнения операций j-го типа; λ—интенсивность ошибок j-го вида; N и n.— общее число выполненных операций jго вида и допущенное при этом число ошибок; Тj — среднее время выполнения операции J-гo вида.
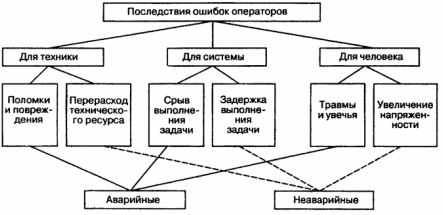
Рис. 9.14. Пример классификации ошибок оператора (по их последствиям)
Приведенные выше формулы справедливы лишь для режима устойчивой работоспособности оператора. В этом случае, зная интенсивность ошибок λпри выполнении различных операций и алгоритм работы оператора, можно найти вероятность безошибочного выполнения оператором этого алгоритма:

где к — число выполненных операций jго вида; r— число различных типов операций (j= 1, 2,r).
Важным показателем надежности является и коэффициент готовности оператора, представляющий собой вероятность включения оператора в работу в любой момент времени. Коэффициент готовности определяется выражением
![]()
где Г — время, в течение которого оператор по тем или иным причинам не смог принять поступившую информацию (например, не находился на рабочем месте); Т— общее время работы оператора.
Введение показателей восстанавливаемости связано с возможностью оператора контролировать свои действия и исправлять допущенные ошибки. Вероятность исправления оператором допущенной ошибки при наличии в системе схемы контроля равна
![]()
где Рк — вероятность выдачи сигнала схемой контроля; Робн — вероятность обнаружения оператором сигнала контроля; Ри — вероятность исправления ошибочных действий при повторном выполнении алгоритма.
Показатели своевременности действия оператора вводятся в связи с тем, что правильные, но несвоевременные действия не приводят к достижению цели, т. е. дают тот же результат, что и совершенная ошибка. Поэтому, как правило, на выполнение определенных задач в человеко-машинных системах отводится определенный лимит времени tn, превышение которого рассматривается как ошибка.
Основным показателем своевременности является вероятность выполнения задачи в течение времени τ < tл. Эта вероятность равна

Где f(т) — функция распределения времени решения задачи человеком-оператором.
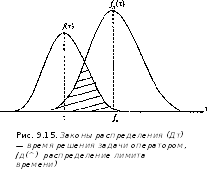
Время tл может быть как постоянной, так и случайной величиной. В первом случае вероятность Рсв определяется приведенным выше выражением. Во втором Рв вычисляется по очень сложным формулам. Поэтому используются упрощенные решения, базирующиеся, например, на предположении, что значения х и 1л подчиняются нормальному закону распределения с параметрами τ,σи τ л, σл, соответственно (рис. 9.15).
Несвоевременное решение задачи управления может иметь место также при исправлении допущенных ошибок. Очень часто такие ошибки обнаруживаются с помощью инструментального самоконтроля. Существует большое количество способов исправления ошибок. Например, может быть принята одна из возможных схем, когда ошибка обнаруживается только после выполнения всех действий и для ее исправления повторяют решение задачи. В этом случае обычно считают, что первое решение задачи и все ее последующие повторения независимы. Следовательно, вероятность безошибочного решения при каждом повторении оценивается величиной Роп.
Надежность деятельности оператора не остается величиной постоянной, а изменяется с течением времени и зависит от условий функционирования. Эти изменения обусловлены как изменением параметров режима деятельности оператора, так и изменением его работоспособности и состояния. Поэтому при определении надежности оператора в каждом конкретном случае приходится выбирать те или иные факторы, наиболее характерные для данного вида деятельности. С каждым фактором связывается определенное состояние системы «человек — машина», и для каждого состояния определяется конкретное значение изучаемого показателя надежности оператора.
В такой постановке показатель надежности оператора представляет собой дискретную случайную величину, неявным образом зависящую от времени через выбранные условия деятельности (факторы надежности). Рисунок 9.16 иллюстрирует пример изменения состояний системы «человек — машина» во времени.
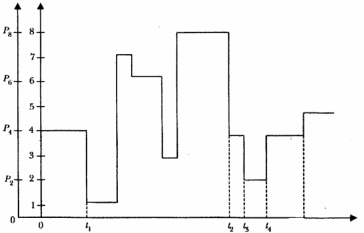
Рис. 9.16. Динамика изменений состояния СЧМ во времени
В приведенном примере система может принимать несколько состояний t=l,2, 3..., каждому из которых соответствуют значения надежности оператора Роп1, Роп2, РопУ-- • Например, в промежутки времени 0 — tv tt — tv t4—15 система находится в состоянии, условно обозначенном i - 4. Это состояние вызвано действием определенных факторов, влияющих на надежность работы оператора, которая в данном случае равна Роп4. При действии других факторов система находится в иных состояниях; каждому из них соответствует определенное значение надежности работы оператора.
С учетом рассмотренных предположений среднее значение вероятности безошибочной работы оператора равно
![]()
где Р. — вероятность наступления г-го состояния системы; Pon(i) _ ловная вероятность безошибочной работы оператора в t-м состоянии; т — число рассматриваемых состояний системы.