

zaharov
.pdf3.3. Рулевые агрегаты и рулевые приводы |
143 |
Пружинная тяга обратной связи при заедании золотника одного из совместно работающих приводов обеспечивает возможность перемещения его входной качалки за счет обжатия пружины в тяге повышенным усилием управления в сторону выдвижения штока.
Рабочая жидкость из гидросистемы изделия через штуцер ПОДАЧА по каналу I через входной фильтр Ф1 поступает:
по каналам 2 и 3 в полость А распределительного устройства Р1;
по каналам 4 и 5 в пружинные полости перепускных клапанов КП1 и КП2, которые под действием давления рабочей жидкости и уси-
лия пружин остаются закрытыми.
При неподвижных входной качалке СР1.1 и штоке ИМ1.1 исполнительного механизма ИМ1, т. е. при нейтральном положении золотника Р1.1 распределительного устройства Р1 расходные окна «а» и «б» перекрыты буртами золотника Р1.1 и рабочая жидкость не поступает в полости исполнительного механизма ИМ1.
При смещении входной качалки СР1.1 вниз она поворачивается относительно неподвижной точки 01. Так как трение по штоку ИМ1.1 больше трения в системе привода золотника Р1.1, то дифференциальная качалка СР1.3, связанная с входной качалкой СР1.1 в точке 02, сместится вправо относительно неподвижной точки 03. Максимальное смещение дифференциальной качалки определит ограничитель хода СР1.2. Тяга золотника СР1.4 сместится вправо и повернет рычаг золотника СР1.5 по часовой стрелке.
Рабочая жидкость под давлением из полости А распределительного устройства Р1 через каналы 6 и 7 поступает в полость В исполнительного механизма ИМ1 и перемещает поршень со штоком ИМ1.1 вправо. Поршень, перемещаясь, вытесняет рабочую жидкость из полости Г исполнительного механизма ИМ1 через каналы 9 и 8 в полость Б распределительного устройства Р1, а затем через каналы 10, 11 в сливную гидролинию. При движении штока ИМ1.1 вправо пружинная тяга обратной связи СР1.6 смещается вправо, поворачивая дифференциальную качалку СР1.3 относительно точки 02 вправо до тех пор, пока дифференциальная качалка СР1.3 не займет нейтральное положение относительно ограничителя хода СР1.2. При этом тяга золотника СР1.4 переместится влево и повернет рычаг золотника СР1.5 против часовой стрелки. Золотник Р1.1 сместится вправо и займет нейтральное положение. Движение штока прекратится. При смещении входной качалки СР1.1 вверх через систему рычагов аналогично описанному выше про-
144 |
Глава 3. ГИДРАВЛИЧЕСКИЕ ПРИВОДЫ СИСТЕМ УПРАВЛЕНИЯ |
исходит смещение золотника Р1 распределительного устройства Р1 вправо. Рабочая жидкость под давлением из полости А распределительного устройства Р1 через окно «а», каналы 8, 9 поступает в полость Г исполнительного механизма ИМ1 и перемещает поршень со штоком ИМ1.1 влево. Поршень, перемещаясь, вытесняет рабочую жидкость из полости Б исполнительного механизма ИМ1 через каналы 6 окно «б» в полость Б распределительного устройства, а затем через каналы 10, 11 в сливную гидролинию. При движении штока ИМ1.1 влево пружинная тяга обратной связи СР1.6 смещается влево, поворачивая дифференциальную качалку СР1.3 относительно точки 02 вправо до тех пор, пока дифференциальная качалка СР1.3 не займет нейтрального положения относительно ограничителя хода СР1.2. При этом тяга золотника СР1.4 переместится вправо и повернет рычаг золотника СР1.4 по часовой стрелке. Золотник Р1.1 сместится влево и займет нейтральное положение. Движение штока прекратится.
При параллельной работе нескольких приводов из-за разных перекрытий золотниками расходных сторон распределительных устройств может происходить запаздывание открытия расходных окон одного из приводов относительно других. В результате одна из полостей «запаздывающего» привода может оказаться запертой. В этом случае при перемещении поршня «запаздывающего» привода под действием усилия, развиваемого другими приводами, в запертой полости исполнительного механизма возникает повышенное давление рабочей жидкости, которое через каналы 7, 17 для полости В или 9, 18 для полости Г воздействует на торец перепускного клапана КП1 или КП2. При достижении давлением значения, большего давления подачи и усилия затяжки пружины, действующих на клапан с другой стороны, клапан отжимается. Рабочая жидкость по каналам 12 для полости В или по каналам 13, 11 для полости Г перетекает в сливную гидролинию. Давление в полости В или Г падает, и клапан возвращается в исходное положение.
Основные технические характеристики
Рабочая жидкость |
НГЖ-5 |
Температура рабочей жидкости, °С |
Минус 20...+100 |
Температура окружающей среды, °С |
Минус 60...+60 |
Давление рабочей жидкости, МПа (кгс/см2): |
|
номинальное |
20,6 (210) |
3.3. Рулевые агрегаты и рулевые приводы |
145 |
в сливной гидролинии на выходе из привода |
0,98 (10) |
в напорной и сливной гидролиниях при отключен- |
|
ном гидропитании (давление наддува), не менее |
0,02 (0,2) |
Максимальный ход входного звена, мм, не более |
55,5 ± 2,5 |
Максимальный ход выходного звена, мм |
49 ± 0,7 |
Максимальное рассогласование по входному звену, мм |
3,2 ± 0,3 |
Максимальное усилие, развиваемое на выходном звене, |
|
кН (кгс): |
|
на уборку штока |
43,2±6,9(4400±700) |
на выпуск штока |
54,8±7,4(5600±750) |
Максимальная скорость выходного звена при отсутствии |
|
внешней нагрузки на выходном звене: |
|
на уборку штока |
74 ± 20 |
на выпуск штока |
82± 20 |
Усилие перемещения входного звена для страгивания |
|
после выдержки 5 с, Н (кгс) |
10 (1,0) |
Масса привода, заполненного рабочей жидкостью, кг |
7,3 ± 0,5 |
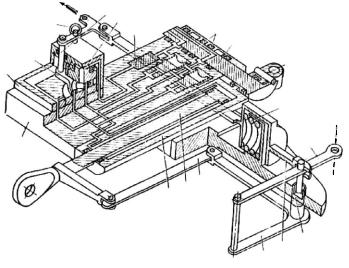
На рис. 3.34 показана схема одноканального необратимого рулевого привода РП-57, предназначенного для управления элеронамиинтерцепторами. Агрегат РП-57 является необратимым гидроусилителем с жесткой обратной связью.
|
7 |
|
|
|
6 |
8 |
|
|
|
9 |
|
10 |
|
|
|
|
|
||
|
|
|
11 |
|
5 |
|
|
|
|
4 |
|
|
|
|
|
|
|
|
12 |
|
|
|
|
О1 |
3 |
|
|
|
13 |
|
|
17 |
О |
О1 |
|
2 |
1 |
|
|
|
|
|
|
14
15
16
О
Рис. 3.34. Рулевой привод РП-57:
146 |
Глава 3. ГИДРАВЛИЧЕСКИЕ ПРИВОДЫ СИСТЕМ УПРАВЛЕНИЯ |
1 – шток; 2 – цилиндр; 3 – корпус; 4 – предохранительное устройство; 5 – рычаг; 6 – фиксатор; 7 – вал; 8 – золотник; 9 – фильтр; 10 – перепускной клапан; 11 – распределитель; 12 – пружина; 13 – входная качалка; 14 – ограничитель хода золотника; 15 – привод золотника; 16 – качалка; 17 – тяга
Усилие, передаваемое рулевым приводом, создается давлением жидкости, подводимой от 1 ГС.
Основными частями рулевого привода являются корпус 3, цилиндр 2, шток 1, золотник 8, входная качалка 13, тяга обратной связи 17, качалка обратной связи 16.
Распределитель 11 обеспечивает подвод и слив жидкости из рулевого привода.
Сигнал для работы поступает на входную качалку 13 через дифференциальный механизм, связывающий систему управления элеронов – интерцепторов с отклонением элеронов. Качалка, поворачиваясь относительно оси 0-0, передает усилие на золотник 8. Золотник открывает доступ жидкости из магистрали давления в одну из полостей цилиндра. В результате этого шток начинает перемещаться, отклоняя элеронинтерцептор. Из противоположной полости будет происходить слив жидкости.
Так как обратная связь соединена со штоком, то движение от него заставит повернуться входное звено относительно оси 0 – 0 . В результате этого золотник 8 перекроет подачу жидкости и отклонение элеро- нов-интерцепторов прекратится.
При отклонении штурвала по ходу часовой стрелки на 125 правый элерон отклоняется вверх на 20 , правый элерон-интерцептор также отклоняется вверх на 45 (левый элерон-интерцептор не отклоняется, оставаясь в нейтральном положении).
В случае возвращения отклоненного вверх элерона в нейтральное положение проводка системы управления элероном-интерцептором автоматически возвращается в нейтральное положение под действием усилия пружины 12 механизма обратной связи. Тогда золотник пропустит жидкость в другую полость цилиндра, и шток, втягиваясь в цилиндр, установит элерон-интерцептор в нейтральное положение. В этом положении усилие предварительной затяжки пружины равно 35 кгс. Расчетное усилие обжатой пружины при отклоненном элеронеинтерцепторе вверх равно 50 кгс.
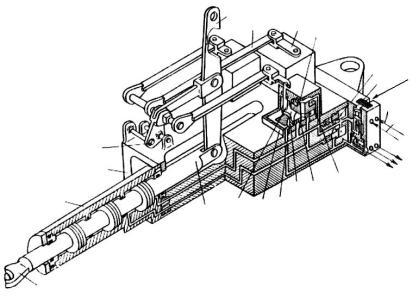
Рулевой привод РП-56В является силовым агрегатом для отклонения РВ или РН и представляет собой трехкамерный необратимый
3.3. Рулевые агрегаты и рулевые приводы |
147 |
гидроусилитель с обратной связью. Усилие, передаваемое рулевым приводом, создается давлением жидкости, подводимой от трех гидросистем. Каждая гидросистема питает только свою камеру рулевого привода.
Рулевой привод (рис. 3.35) состоит из цилиндра 16, корпуса 17, штока 14 с тремя поршнями, трех распределительных устройств 12, фильтра 7, перепускных клапанов 6, золотника 10, ограничителя хода золотника 1.
|
|
2 |
3 |
4 |
|
|
|
|
|
|
|
|
5 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
7 |
|
|
1 |
|
|
|
|
|
|
|
а |
||
|
|
|
|
|
|
|
|
ч |
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
П |
|
|
|
|
|
|
|
|
|
|
Подача 2 |
||
|
|
|
|
|
|
|
|
Подача 3 |
|
|
1 |
|
|
|
|
|
|
Слив 1 |
|
|
|
|
|
|
|
|
|
||
|
17 |
|
|
|
8 |
|
|
Слив 2 |
|
|
|
|
|
|
Слив 3 |
|
|||
|
|
|
|
|
10 |
|
|||
|
|
|
|
9 |
|
|
|
|
|
16 |
|
|
|
|
|
|
|
|
|
|
13 |
|
11 |
|
|
|
|
|
|
|
14 |
12 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
15
Рис. 3.35. Рулевой привод РП-56В:
1 – ограничитель; 2 – входная качалка; 3, 4, 11 – рычаги; 5 – верхняя пята; 6 – клапан; 7 – фильтр; 8 – кольцо; 9 – нижняя пята; 10 – золотник; 12 – распределительное устройство; 13 – вал; 14 – шток; 15 – серьга; 16 – цилиндр; 17 – корпус
Корпус имеет шесть штуцеров: три – нагнетания и три – слива в соответствующие гидросистемы. Цилиндр разбит на три полости, изолированные друг от друга. Через все полости проходит один шток с тремя расположенными на нем поршнями.
Входная качалка 2 передает движение на золотник через систему рычагов 3 и 4. Кроме того, входная качалка соединяется со штоком (входным звеном), образуя обратную связь агрегата.
148 |
Глава 3. ГИДРАВЛИЧЕСКИЕ ПРИВОДЫ СИСТЕМ УПРАВЛЕНИЯ |
Управляющий сигнал поступает на входную качалку 2. Она, поворачиваясь относительно оси, соединяющей ее со штоком, передает движение через рычаги 3 и 4 к трем золотникам 10. Золотники соответственно открывают доступ жидкости в три полости силового штока.
Под действием усилий от давления жидкости шток начнет перемещаться и отклонять руль. Из трех противоположных полостей жидкость будет сливаться в баки своих гидросистем. При перемещении шток поворачивает входную качалку относительно точки входа. Качалка передает это движение через рычаги 3 и 4 на золотники. Золотник, вращаясь в обратную сторону, перекроет подачу жидкости в полости цилиндра. Слив жидкости также прекращается.
Запертая жидкость в полостях цилиндра будет удерживать руль в отклоненном положении. Если повернуть входную качалку на такой же угол в обратном направлении, то руль вернется в исходное положение.
Усилие, развиваемое на штоке при совместной работе трех ГС, равно 4100 кгс. При отказе одной ГС усилие равно не менее 2600 кгс, работая от одной ГС, шток развивает усилие не менее 1000 кгс.
Рулевой привод обеспечивает отклонение рулей при отказе одной или двух ГС. При отказе двух ГС жидкость будет подаваться только в одну камеру цилиндра.
При заклинивании одного из золотников его вал 13, закручиваясь, не мешает работе рулевого привода. В этом случае полости отказавшего золотника закольцовываются между собой, не создавая препятствия движению штока. Перепускные клапаны предохраняют полости цилиндра от резкого повышения давления жидкости, соединяя полость повышенного давления с гидробаком.
Усилие на входную качалку поступает через тяги, связанные со штурвальной колонкой или пультом ножного управления. При работе системы АБСУ 154 усилие на качалку поступает от электрогидравлического агрегата РА-56В.
Рулевой привод системы управления рулем направления работает при подведенном давлении жидкости, равном 210 кгс/см2. В систему управления рулями высоты к рулевым приводам подается жидкость под давлением 125 кгс/см2. Корпусом рулевой привод крепится к каркасу киля или стабилизатора, а штоком – к рулю.
3.3. Рулевые агрегаты и рулевые приводы |
149 |
В системе управления рулями высоты установлено два рулевых привода. В системе управления рулем направления установлен один рулевой привод.
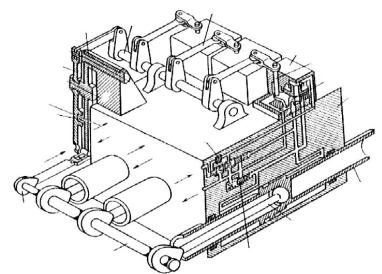
Рулевой привод РП-55, показанный на рис. 3.36, является силовым агрегатом, обеспечивающим отклонение элеронов. РП-55 представляет собой трехкамерный необратимый гидроусилитель с обратной связью.
Т
8
0
Подача 3
7
|
|
|
|
|
а |
|
|
|
|
|
т |
|
|
|
|
о |
|
|
|
|
л |
|
|
|
|
и |
|
|
|
|
п |
|
|
|
|
т |
|
|
|
|
|
О |
|
|
|
|
|
6
11
9 10
|
|
|
|
Т |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
3 |
|
2 |
|
|||
|
|
|
|
|
||||
|
|
в |
а |
0 |
|
|||
и |
|
а |
|
|
|
|||
л |
|
|
ч |
|
|
|
|
|
|
д |
|
|
|
|
|||
С |
|
|
о |
|
|
|
2 |
|
|
П |
|
|
|
||||
|
|
|
|
л |
в |
0 |
||
|
|
|
|
и |
|
|
||
|
|
|
|
С |
|
|
|
|
4
|
|
а |
|
|
ч |
|
|
|
а |
|
|
д |
|
|
|
о |
|
|
|
П |
|
|
1 |
|
|
|
|
|
|
в |
|
|
и |
|
|
л |
|
|
|
С |
|
|
|
12
13
14
15
1
2
5 |
3 |
|
Рис. 3.36. Рулевой привод РП-55:
1 – шток; 2 – шатун; 3 – клапан; 4 – фильтр; 5 – ось; 6 – тяга обратной связи; 7 – ограничитель хода золотника; 8 – входная качалка; 9 – качалка обратной связи; 10 – привод золотников; 11 – тяга; 12 – распределительное устройство; 13 – вал; 14 – золотник; 15 – блок цилиндров
Усилие, передаваемое рулевым приводом, создается давлением жидкости, подводимой от 1, 2 и 3 гидросистем, причем каждая гидросистема питает только свою камеру. По конструкции и работе он аналогичен РП-56В, установленным в СУ рулем высоты и РН.
Усилие, развиваемое на штоке при работе трех гидросистем, равно 1500 кгс, при работе двух гидросистем – не менее 1000 кгс и одной гидросистемы – не менее 470 кгс.
Управление рулевым приводом ведется от штурвалов через жесткую проводку и от электрогидравлического рулевого агрегата РА-56В,

150 |
Глава 3. ГИДРАВЛИЧЕСКИЕ ПРИВОДЫ СИСТЕМ УПРАВЛЕНИЯ |
работающего при включенной автоматической бортовой системе управления АБСУ-154. Номинальное рабочее давление, подводимое к рулевому приводу, равно 210 кгс/см2.
Три штока рулевого привода, соединенные с тремя рычагами элерона, объединяются в общий узел. Корпус рулевого привода крепится
клонжерону крыла.
Всистеме управления элеронами установлено два рулевых привода РП-55.
3.4.Контроль и испытания гидравлического оборудования
Всовременной авиации гидравлический привод стал основным типом силового привода различных функциональных подсистем ЛА. Наряду с усложнением и увеличением количества функций гидропри-
водов значительно расширились условия их работы. Гидроприводы длительно работают в условиях высоких и низких температур рабочей жидкости и окружающей среды, высоких давлений и значительных расходов рабочей жидкости. Рост скорости полета и мощности двигателей привели к увеличению интенсивности механических воздействий на гидроприводы (вибраций, ударов и линейных ускорений).
Работу гидрооборудования проверяют обычно при стендовых испытаниях, являющихся очень важным этапом при создании ЛА. Стендовые испытания проводятся на всех стадиях жизненного цикла ЛА: проектировании, доводке, производстве, эксплуатации и ремонте.
Испытания классифицируются по видам и назначению, объему и содержанию, месту проведения и регламентируются соответствующими ГОСТами и ОСТами (рис. 3.37).
Анализ технологических процессов наземных испытаний и практика их проведения позволяют выделить характерные этапы: разработка

3.4. Контроль и испытания гидравлического оборудования |
151 |
методов испытаний, создание испытательных стендов, подготовка объектов и оборудования к испытаниям и собственно испытания.
Цикл испытаний
По назначе- |
|
По уровню |
|
|
По стадиям |
|
|
По условиям |
|
По продолжи- |
|
По результатам |
|
По видам |
|
|
|
По опреде- |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
ляемым |
|
||||||||||||||||||||||||
нию |
|
проведения |
|
|
жизненного |
|
|
и месту |
|
|
тельности |
|
воздействия |
|
воздействия |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
характери- |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
цикла |
|
|
|
проведения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
стикам |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Исследова- |
|
|
Государст- |
|
Доводоч- |
|
Лаборатор- |
|
Нормаль- |
|
Неразруша- |
|
|
Механи- |
|
Функци- |
|||||||||||||||||||
|
|
|
|
|
|
ные |
|
|
ные |
|
ющие |
|
|
|
ческие |
|
ональные |
|||||||||||||||||||
|
тельские |
|
|
|
венные |
|
|
|
ные |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Контроль- |
|
|
Межведом- |
|
Предвари- |
|
Стендовые |
|
Ускоренные |
|
Разруша- |
|
|
Климати- |
|
|
На |
||||||||||||||||||
|
|
ные |
|
|
ственные |
|
|
тельные |
|
|
|
ющие |
|
|
|
ческие |
|
надежность |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Сравни- |
|
|
Ведомст- |
|
Приемоч- |
|
|
|
|
|
Сокращен- |
|
|
На |
|
Тепловые |
|
|
На |
||||||||||||||||
|
|
|
|
|
Натурные |
|
|
стойкость |
|
|
безопасность |
|||||||||||||||||||||||||
|
тельные |
|
|
|
венные |
|
|
|
ные |
|
|
|
ные |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
На |
|
Радиации- |
|
|
|
|||||
|
Определи- |
|
|
|
|
|
|
|
|
Квалифи- |
|
С исполь- |
|
|
|
|
|
прочность |
|
|
|
онные |
|
На транспор- |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
табельность |
|||||||||||
|
тельные |
|
|
Типовые |
|
|
|
зованием |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
кационные |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
моделей |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
На устойчи- |
|
|
Электри- |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вость |
|
|
|
ческие |
|
Граничные |
||||
|
|
|
|
|
|
Аттеста- |
|
|
|
Приемо- |
|
Эксплу- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
ционные |
|
|
сдаточные |
|
атационные |
|
|
|
|
|
|
|
|
|
|
Электро- |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Биологи- |
|
|
|
Технологи- |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ческие |
|
магнитные |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ческие |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Сертифи- |
|
Периоди- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
кационные |
|
|
ческие |
|
|
|
|
|
|
|
|
|
Химические |
|
Магнитные |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.37. Классификация испытаний
Чтобы при стендовых испытаниях получить точную оценку соответствия гидропривода предъявляемым требованиям, необходимо правильно имитировать реальные внешние факторы, действующие на элементы гидропривода при эксплуатации. Однако точная имитация всех внешних факторов при испытаниях практически невозможна по двум основным причинам. Первая – внешние факторы и их сочетание является случайными величинами, существенно изменяющимися как во время каждого полета, так и от полета к полету. Поэтому ставить задачу имитации внешних факторов можно лишь во время некоторого условного типового полета. Вторая – техническая невозможность создать испытательный стенд, позволяющий одновременно имитировать управляющие сигналы, нагрузку на выходном звене гидропривода, са-
152 |
Глава 3. ГИДРАВЛИЧЕСКИЕ ПРИВОДЫ СИСТЕМ УПРАВЛЕНИЯ |
молетную систему гидропитания, а также всю совокупность механических и климатических воздействий.
Вследствие этих причин необходимо упрощать стендовые испытания, однако при этом следует максимально точно имитировать все внешние факторы, существенно влияющие на технические характеристики гидрооборудования и на его надежность.
При всем многообразии испытательных работ можно выделить две взаимодополняющие группы: физические испытания объектов и испытания с привлечением моделей.
Физические испытания проводятся как в искусственно созданных условиях, близких к условиям эксплуатации, так и в естественных условиях функционирования объекта. Первые осуществляются с помощью специальных методов и средств в лабораторных условиях (лабораторные испытания) или в составе испытательных стендов (стендовые испытания). Ко вторым относятся натурные (летные) испытания функциональных элементов, агрегатов, подсистем и ЛА в целом.
Испытания на моделях проводятся с привлечением методов физического и математического моделирования. При физическом моделировании объект испытаний заменяется подобной моделью, которая позволяет при определенных допущениях получить требуемую информацию. Применение математических моделей значительно расширяет возможности эксперимента. Они позволяют имитировать исследование режимов, условия эксплуатации, проводить вычислительные эксперименты с функциональными моделями испытательных объектов.
Основным руководящим документом при испытаниях авиационной техники являются АП самолетов и вертолетов. В этом документе конкретизируются виды испытаний, методика их проведения, основные параметры и характеристики условий и режимов испытаний, а также ряд других требований, обеспечивающих необходимый уровень безопасности полета.
Основным нормативным документом для каждого конкретного испытания является программа испытаний, которая включает в себя следующие разделы: цели испытаний, краткие сведения об объекте испытаний, методика проведения, состав экспериментального оборудования, алгоритмы обработки информации, ограничения при проведении испытаний.