

zaharov
.pdf3.2. Гидравлические исполнительные механизмы |
|
123 |
||||
|
3 |
|
|
|
5 |
|
Vвх |
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
Vо.с. |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
h |
|
|
|
|
|
|
|
|
|
|
7 |
6 |
|
|
|
|
|
|
|
|
|
|
|
Pсл |
|
|
|
|
|
х |
Pп |
|
|
|
P |
|
P |
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
mн |
|
|
|
|
– |
1 |
|
|
|
+ |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.18. Следящий гидропривод с дроссельным регулированием и автономным питанием:
1 – силовой гидропривод; 2 – электрогидравлический усилитель ЭГУ-1; 3 – усилитель; 4 – ДОС; 5 – источник питания; 6 – насос; 7 – переливной клапан
двигателя, существенно увеличивающие их КПД, допустимо проектирование исполнительных механизмов дроссельного управления значительно большей выходной мощности.
На рис. 3.17 показана схема гидропривода с питанием от бортовой гидросистемы большой мощности с постоянным давлением, в котором управляющий сигнал Uвх преобразуется в перемещение h струйной трубки, являющейся первым каскадом гидрораспределителя. Величина h изменяет P на торцах золотника дросселирующего распределителя и его смещение x, от которого, в свою очередь, зависит смещение y выходного звена с присоединенной нагрузкой mн.
Схема гидропривода с автономным источником питания 5 (с насосом постоянной подачи и переливным клапаном) представлена на рис. 3.18. Управляющий сигнал Uвх изменяет положение заслонки распределителя «сопло – заслонка», что приводит к возникновению P на торцах золотника и смещению его на величину, пропорциональную Uвх. Под действием давления жидкости, поступающей в соответст-

124 |
Глава 3. ГИДРАВЛИЧЕСКИЕ ПРИВОДЫ СИСТЕМ УПРАВЛЕНИЯ |
вующую полость, силовой привод 1 отрабатывает входной сигнал, смещая выходное звено с нагрузкой mн в нужном направлении.
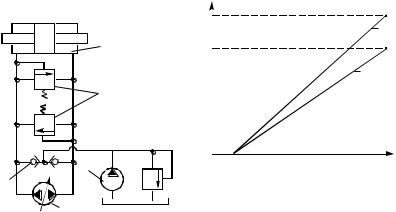
Объемное регулирование. Такое регулирование скорости движения выходного звена гидропривода может осуществляться за счет изменения рабочего объема либо насоса, либо гидродвигателя или изменения рабочего объема обеих гидромашин. Упрощенные схемы возможных сочетаний регулируемых и нерегулируемых насосов и гидродвигателей в гидроприводах с объемным регулированием показаны на рис. 3.19.
Регулирование путем изменения рабочего объема может быть использовано в гидроприводах поступательного, поворотного и вращательного движений. На рис. 3.20, а показана принципиальная схема гидропривода поступательного движения с замкнутой циркуляцией, в котором скорость движения штока гидроцилиндра 1 регулируется за счет изменения подачи насоса 4. Выражение для скорости движения штока W при F / S Pкл записывается в виде
W |
eнqнnн |
K |
|
F |
, |
(3.7) |
|
об S 2 |
|||||
|
S |
|
|
|||
где qн – максимальный рабочий объем насоса; nн |
– частота вращения |
|||||
насоса; S – эффективная площадь поршня гидроцилиндра; Kоб – ко-
эффициент объемных потерь системы, определяемый изменением объемного КПД насоса и гидродвигателя в функ-
|
|
|
3 |
ции давления (нагрузки); F – нагрузка на |
||
|
|
|
||||
1 |
|
|
|
2 |
||
|
|
|
||||
|
|
|
|
|
штоке; |
Pкл – давление, на которое отрегули- |
а |
|
|
|
|||
|
|
|
рованы |
предохранительные клапаны 2; eн – |
||
|
|
|
|
|
||
|
|
|
|
|
параметр регулирования насоса, равный от- |
|
|
|
|
|
|
ношению текущего значения рабочего объема |
|
б |
|
|
|
|||
|
|
|
насоса к максимальному рабочему объему: |
|||
|
|
|
|
|
||
|
|
|
|
|
||
|
|
|
|
|
eн = qн / qн max . |
|
|
|
|
|
|
||
в |
|
|
|
Направление движения выходного звена |
||
Рис. 3.19. |
|
Возможные |
гидропривода изменяют реверсированием по- |
|||
|
тока рабочей жидкости, подаваемой насосом |
|||||
схемы гидроприводов |
||||||
с объемным регулирова- |
(реверс подачи насоса). При этом необходимо |
|
вначале уменьшить подачу насоса до нуля, а |
||
нием |
||
затем увеличить ее, но в противоположном |
||
|
3.2. Гидравлические исполнительные механизмы |
125 |
направлении. Напорная и сливная гидролинии меняются местами. Чтобы компенсировать утечки жидкости в гидроприводе с замкнутой циркуляцией, а также исключить возможность кавитации на входе в насос, используют вспомогательный насос 3, подающий рабочую жидкость в систему гидропривода через обратные клапаны 5.
При таком способе регулирования скорости усилие, развиваемое выходным звеном гидропривода, не зависит от скорости движения. В этом случае диапазон регулирования определяется объемным КПД гидропривода, а также максимальной подачей насоса, определяемой его рабочим объемом.
На рис. 3.20, б показана зависимость скорости движения и мощности на выходном звене гидропривода от параметра регулирования при постоянной нагрузке.
|
V P |
|
Pmax |
|
P |
1 |
Vmax |
|
V |
2 |
|
3 |
ен |
0,5 |
1 е |
|
|
|
|
5 |
|
б |
|
4 |
|
|
|
а
Рис. 3.20. Схема гидропривода с регулируемым насосом
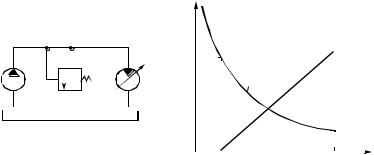
Регулирование путем изменения рабочего объема гидродвигателя применяется только в гидроприводах вращательного движения, где в качестве гидродвигателя используется регулируемый гидромотор (рис. 3.21). В этом случае регулирование выполняется при постоянной мощности, так как уменьшение рабочего объема гидродвигателя увеличивает скорость выходного звена гидропривода и соответственно крутящий момент, развиваемый на выходном звене.
126 |
Глава 3. ГИДРАВЛИЧЕСКИЕ ПРИВОДЫ СИСТЕМ УПРАВЛЕНИЯ |
|
|
|
|
|
|
|
|
|
|
|
nгм |
М |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
nmax |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
nгм |
|
|
|
|
|
|
|
|
|
|
|
|
|
М |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
а |
|
n min |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
егм |
0,5 |
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
1 егм |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Рис. 3.21. Схема гидропривода с регулируемым гидромотором |
||||||||||||||||||||||||||||||||||||||||||||||||||||
Частота вращения гидромотора n |
|
при P P |
|
описывается соот- |
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
гм |
|
|
|
|
|
1 |
|
|
|
|
|
кл |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
ношением |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
q n K |
об |
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
n |
н н |
|
1 |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.8) |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
гм |
|
eгмqгм max |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
где qгм max – максимальный рабочий объем мотора; eгм – параметр ре-
гулирования мотора; P1 – давление в напорной гидролинии, определяемое моментом нагрузки на валу мотора; Kоб – коэффициент объемных потерь (утечек) в системе.
Из выражения следует, что при eгм 0 nгм возрастает до беско-
нечности. Практически существует минимальное значение e , при
гм
котором момент, развиваемый гидромотором, становится равным моменту внутреннего трения, и гидромотор тормозится даже при момен-
те нагрузки, равном нулю ( P1 0 ).
На рис. 3.21, б показана зависимость частоты вращения и развиваемого момента на валу гидромотора от параметра регулирования при
постоянном давлении P1 .
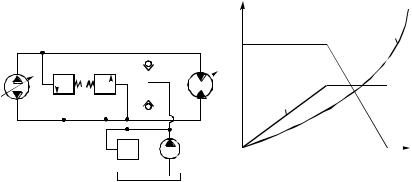
Регулирование путем изменения рабочих объемов насоса и гидродвигателя используют только в гидроприводах вращательного движения с регулируемым гидромотором. Скорость выходного звена рационально регулировать следующим образом:
1) запустить приводной двигатель при eн 0 ;
3.2. Гидравлические исполнительные механизмы |
127 |
2) для страгивания и разгона выходного звена привода изменить eн
от 0 до 1 при eгм 1;
3) дальнейшее увеличение скорости осуществлять путем изменения
|
при eн 1. |
eгм от 1 до eгм |
Уменьшение скорости происходит в обратном порядке. Такой способ позволяет получить большой диапазон регулирования, он обладает всеми достоинствами и недостатками рассмотренных выше схем управления. На рис. 3.22 показаны принципиальная схема (а) и характеристика (б) гидропривода с замкнутой циркуляцией и регулируемыми насосом и гидромотором.
Поскольку гидропривод работает обычно в условиях различных нагрузок, то схема (рис. 3.20), состоящая из регулируемого насоса и нерегулируемого гидродвигателя, нашла наиболее широкое распространение.
|
|
|
|
|
|
|
|
|
|
|
|
nгм |
Р, М |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
М |
|
|
nгм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
nmax |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
е |
|
= 0 |
е |
=е =1 |
е |
гм |
е |
||
|
|
|
|
|
|
|
|
|
|
|
|
е |
н |
= 1 |
н |
|
гм |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
гм |
|
|
|
|
е |
= 1 |
|
|
|
а |
|
|
|
|
|
|
|
|
б |
н |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Рис. 3.22. Схема гидропривода с регулируемым насосом и гидромотором
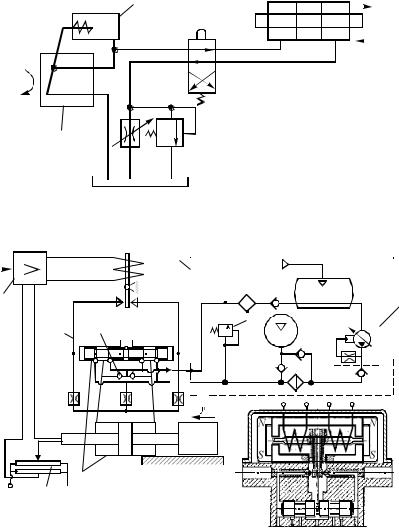
Объемно-дроссельное регулирование гидропривода заклю-
чается в том, что в систему дроссельного регулирования с постоянным давлением устанавливается регулируемый насос и давление поддерживается постоянным не за счет слива части рабочей жидкости через переливной клапан, а за счет изменения подачи насоса. В такой системе регулирования отсутствуют потери в переливном клапане.
На рис. 3.23 показана схема гидропривода поступательного движения с объемно-дроссельным управлением скоростью. Постоянное давление Pн поддерживается путем совместной работы регулятора 1 и
аксиально-поршневого регулируемого насоса 2. Изменение давления
128 |
|
|
|
|
|
|
Глава 3. |
ГИДРАВЛИЧЕСКИЕ ПРИВОДЫ СИСТЕМ УПРАВЛЕНИЯ |
|||||||||||||||
|
|
|
|
|
|
|
1 |
Pн |
|
|
V |
||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
F |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2
Рис. 3.23. Гидропривод с объемно-дроссельным регулированием
VВХ |
VО.С. |
|
I |
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
2 |
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PСЛ


 PП
PП
P |
P |
1 |
2 |
mН
1
 + 4 –
+ 4 –
Рис. 3.24. Следящий гидропривод с объемно-дроссельным регулированием:
а – функциональная схема привода; б – конструктивная схема электрогидравлического усилителя привода: 1 – силовой гидропривод; 2 – электрогидравлический усилитель ЭГУ-2; 3 – усилитель; 4 – ДОС; 5 – источник питания; 6 – насос переменной подачи; 7 – предохранительный клапан; 8 – противокавитационные клапаны

3.2. Гидравлические исполнительные механизмы |
129 |
Pн приводит к изменению положения поршня регулятора 1 и связанно-
го с ним наклонного диска насоса 2. Изменение положения диска приводит к изменению подачи насоса Q . Поэтому в такой системе подача
насоса всегда равна расходу через гидродвигатель и дроссель при Pн const . Скорость движения выходного звена в данном гидроприво-
де определяется формулой (3.6).
Этот вид регулирования используется в следящем гидроприводе с автономным источником питания (рис. 3.24), включающем насос переменной подачи 6 с обратной связью по давлению. Регулирование осуществляется одновременно в золотнике силового привода 1 по управляющим сигналам Uвх и в линии нагнетания насоса 6 по изменению Pн.
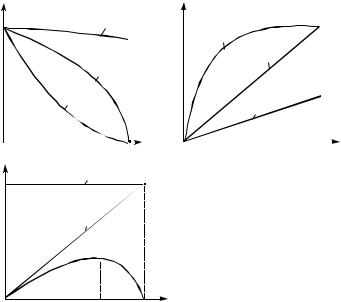
Сравнение способов регулирования гидропривода. Сравни-
тельную оценку различных систем регулирования гидроприводов це-
лесообразно |
проводить |
по |
нагрузочным |
характеристикам |
Wвых.зв f F |
и КПД системы регулирования. |
|
||
На рис. 3.25, а показаны нагрузочные характеристики для гидроприводов с одинаковой максимальной нагрузкой (1 – параллельное включение дросселя; 2 – последовательное включение дросселя; 3 – объемное и объемно-дроссельное управление). Так как для управляемых гидроприводов наибольший интерес представляет не значение КПД на одном из режимов работы, а характер изменения КПД во всем диапазоне регулирования при различных нагрузках, то сравнение систем лучше всего проводить по характеристикам:
|
|
|
|
|
|
|
|
|
W |
|
; |
f |
|
F |
|
, |
|
где W – отношение текущего значения скорости при данной нагрузке к максимальному значению скорости при той же нагрузке.
На рис. 3.25, б приведены характеристики КПД систем регулирова-
ния в зависимости от относительной скорости W вых.зв Wвых.зв , а
Wвых.зв max
на рис. 3.25, в – зависимости КПД системы регулирования от нагрузки
при Wвых.зв max .
Сравнение характеристик на рис. 3.25 показывает, что гидропривод с объемным управлением имеет самую стабильную характеристику
130 |
Глава 3. ГИДРАВЛИЧЕСКИЕ ПРИВОДЫ СИСТЕМ УПРАВЛЕНИЯ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
3 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
2 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
1 |
|
|
|
0,385 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
Fmax F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,5 б |
|
|
|
|
|
|
|
|
|
|
|
|
1 V |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1
1
2
3
0,385 













в |
2/3 Fmax Fmax F |
|
Рис. 3.25. Характеристики гидроприводов с различными способами регулирования:
1 – параллельное включение дросселя; 2 – последовательное включение дросселя; 3 – объемное и объемно-дроссельное управление
скорости во всем диапазоне изменения нагрузок и самый высокий КПД системы регулирования во всем диапазоне регулирования скорости выходного звена.
Однако стоимость регулируемых гидромашин выше, чем нерегулируемых, и поэтому только в гидроприводах большой мощности ( N 10 кВт), где выигрыш в энергетике компенсирует увеличение стоимости, целесообразно использовать систему объемного управления. В приводах же небольшой мощности рационально использовать системы дроссельного управления, обеспечив при этом стабильность скорости при изменении нагрузки.
3.3. Рулевые агрегаты и рулевые приводы |
131 |
3.3. Рулевые агрегаты и рулевые приводы
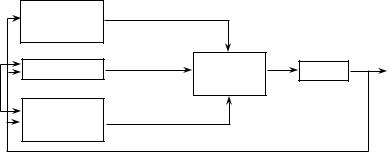
Структура исполнительной части системы управления.
Система управления современным самолетом имеет достаточно сложную структуру с большим числом различных функциональных элементов (рис. 3.26).
|
|
Автоматы |
Управляющий сигнал |
|
|
|
|
|
устойчивости |
|
|
|
|
|
ь |
и управляемости |
|
|
|
|
|
|
|
|
|
||
Заданная программа |
п |
|
|
|
Параметры полета |
|
|
|
|
|
|||
э |
Л е т ч и к |
Перемещение |
Привод |
Самолет |
||
рычагов |
рулевых |
|||||
п |
|
|
||||
|
|
|
|
|||
|
|
|
поверхностей |
Отклонение рулей |
||
|
ю |
|
|
|
|
|
|
|
Автоматическая |
|
|
|
|
|
|
система |
|
|
|
|
|
|
управления |
Управляющий сигнал |
|
|
Рис. 3.26. Структурная схема замкнутого контура управления самолетом
Привод рулевых поверхностей самолета в общем случае состоит из следующих основных частей:
а) блоков связи – устройств, с помощью которых привод соединяется с системами и устройствами формирования командных сигналов управления;
б) дистанционной передачи – устройства, обеспечивающего передачу командного сигнала на расстояние от блоков связи до рулевых поверхностей;
в) исполнительных механизмов – устройств, с усилением или без усиления по мощности преобразующих командные сигналы в механическое перемещение, которое сообщается рулевым поверхностям управления;
г) системы энергоснабжения, обеспечивающей энергией (электрической, гидравлической, пневматической или механической) устройства и элементы приводов.
Исполнительные устройства – сервоприводы и рулевые приводы (РП), включаемые в блоки управления и контроля (БУК), составляют
исполнительную часть системы управления. Исполнительная часть отрабатывает сигналы управляющей части и непосредственно связана
132 |
Глава 3. ГИДРАВЛИЧЕСКИЕ ПРИВОДЫ СИСТЕМ УПРАВЛЕНИЯ |
с конструкцией самолета. На эту часть приходится основная масса системы управления. Исполнительная часть в соответствии с требованиями обеспечения надежности управления должна быть резервирована. В резервированной силовой системе может возникать силовое взаимодействие между каналами рулевых приводов, что отражается на ресурсе приводов и на увеличении массы конструкции приводов и связей между ними.
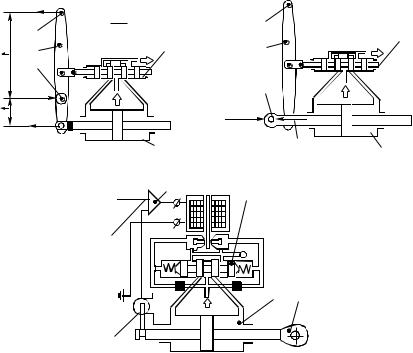
В обратимых гидроприводах систем управления рулями (рис. 3.27, а), у которых усилие на выходном звене Pд пропорционально усилию, приложенному на входном звене Рвх, внешняя нагрузка Рн (шарнирный момент на руле) частично передается на входное звено и,
Рвх |
|
|
|
|
|
|
|
|
Р = Р · |
l 2 |
|
|
1 |
|
|
|
l + l |
|
|
|
|||
1 |
вх н |
|
|
|
|
||
|
1 |
2 |
|
Р = Р |
5 |
||
|
|
|
|
|
|||
|
|
|
|
|
д |
н |
|
2 |
|
|
|
5 |
2 |
|
|
|
|
|
|
|
|
||
l |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
Р |
|
|
|
|
3 |
|
|
н |
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
Р |
|
|
|
|
н |
|
|
|
|
|
|
Р |
|
|
|
д |
|
|
6 |
|
|
|
|
|
|
|
|
д |
|
6 |
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
б |
|
|
|
|
|
|
2 |
|
|
|
4 |
5 |
|
1
6 3
=
+ 
7
в
Рис. 3.27. Гидравлические следящие приводы:
а – обратимый; б – необратимый; в – электрогидравлический; 1 – входное звено; 2 – сравнивающее устройство; 3 – выходное звено; 4 – управляющий сигнал;
5 – регулирующее устройство; 6 – гидродвигатель; 7 – обратная связь