

zaharov
.pdf3.3. Рулевые агрегаты и рулевые приводы |
133 |
следовательно, на рычаг управления. В случае отказа гидросистемы рулевой привод может переключаться на режим работы без усиления мощности.
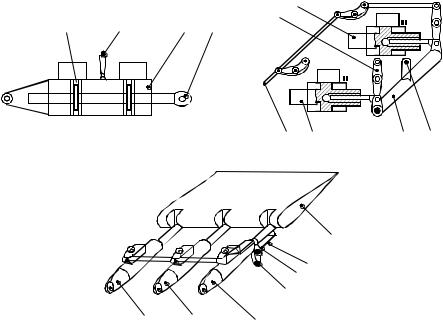
В необратимых рулевых приводах (рис. 3.27, б) гидродвигатель полностью воспринимает нагрузку на выходном звене и на входное она не передается. Системы с такими рулевыми приводами – системы с необратимым бустерным управлением (НБУ). Структура такой системы показана на рис. 3.28. Широкое распространение в НБУ нашли приводы с дроссельным регулированием, а также приводы с объемным регулированием с автономным гидропитанием (см. разд. 3.2). Исполнительные части первых НБУ обычно имели гидромеханические одноканальные и многоканальные рулевые приводы (рис. 3.27, б и 3.29). Обратная связь на всех приводах была механической.
На самолетах, в системах управления которых используются гидромеханические приводы, для отработки сигналов автоматики применяют сервоприводы. Механический выходной сигнал сервопривода суммируется с механическим сигналом летчика с помощью дифференциального механизма, затем суммарный механический сигнал поступает на вход гидромеханических приводов.
В автоматических системах в качестве исполнительных устройств широко использовались достаточно простые по конструкции электромеханические сервоприводы типа РАУ-107. Эффективность таких систем


















|
|
|
СУУ |
|
режимов |
ny |
вычислитель |
|
Датчики |
|
|
|
полета |
z |
Цифровой |
|
|
||
|
Цифровой канал |
||
|
|
||
ЗУ |
Дц |
|
|
Загрузочное |
Д о |
z |
Аналоговый вычислитель |
устройство |
|
||
|
|
||
|
Аналоговый канал |
|
|
ЗС 

 ГС
ГС 



 Параметры движения самолета
Параметры движения самолета
|
|
Органы |
|
БУК |
РП |
управ- |
Самолет |
ления |
|
||
|
|
|
Рис. 3.28. Структура автоматизированной НБУ современного самолета
134 |
Глава 3. ГИДРАВЛИЧЕСКИЕ ПРИВОДЫ СИСТЕМ УПРАВЛЕНИЯ |
2а
2а |
1 |
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
2 |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
3 |
4 |
а |
|
б |
|
|
|
7 |
|
|
6 |
|
|
5 |
|
|
1 |
2б |
2а |
2 |
|
|
в |
Рис. 3.29. Многоканальный гидромеханический привод суммирования усилий каналов:
а – с тандемным расположением; б, в– с параллельным расположением; 1 – входное
звено; |
2, 2а, 2б – каналы привода; 3 – траверса; 4 – выходное звено; 5 – сравниваю- |
щее |
устройство; 6 – обратная связь; 7 – рулевая поверхность |
наращивалась путем установки последовательно нескольких электромеханических сервоприводов (демпфера ДТ-105 на Ту-22). При этом сервоприводы могли устанавливаться отдельно в механической дистанционной системе управления (МСУ) (Ту-134,) или комплектоваться в одном агрегате с рулевым приводом (см. рис. 3.30).
Для увеличения эффективности автоматики (увеличения углов отклонения поверхности управления) необходимы новые подходы в обеспечении надежности работы автоматических систем, включая сервопривод. Чтобы такие системы функционировали, требуются большие углы отклонения рулей, превышающие допустимые по условиям безопасности значения в случае «увода» сервопривода автоматики в крайнее положение.
3.3. Рулевые агрегаты и рулевые приводы |
|
135 |
|
1а |
|
1а |
7 |
7 |
|
||
|
|
|
|
|
|
|
|
6 |
1 |
|
6 |
|
|
|
|
|
1 |
|
5а |
|
|
|
5 |
|
|
||
|
|
|
|
||
|
8 |
|
|
8 |
|
|
|
|
|
||
|
|
10 |
|
3 |
|
4 |
|
9 |
2 |
|
9 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
3 |
|
|
5 |
2 |
4 |
|
5а |
а |
б |
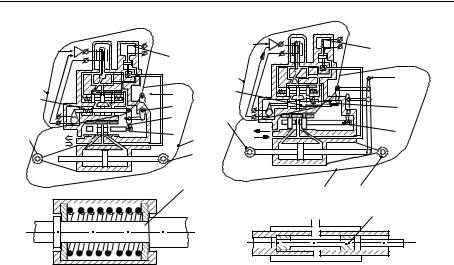
Рис. 3.30. Комплексный агрегат управления:
а – сервопривод включен последовательно с механической проводкой управления б – сервопривод включен параллельно с механической проводкой управления; 1 – механическое входное звено; 1а – электрическое входное звено; 2 – гидромеханический следящий привод; 3 – крепление к неподвижной конструкции; 4 – выходное звено агрегата; 5 – центрирующая пружина; 5а – устройство соединения и пересиливания; 6 – электрогидравлический сервопривод; 7 – электромагнитный кран включения и отключения сервопривода; 8 – выходное звено сервопривода; 9 – золотник; 10 – дифференциальный рычаг
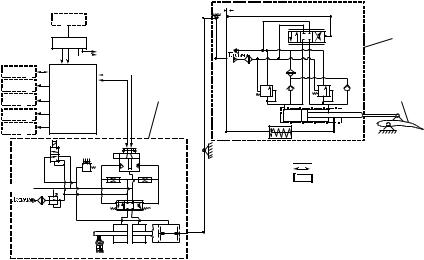
Эти требования были учтены при разработке СДУ – систем дистанционного управления рулевыми поверхностями. На рис. 3.31 приведена структура системы управления рулевыми поверхностями самолета ТУ-204. Система управления рулями состоит из органов управления и привода рулевой поверхности. Привод каждой рулевой поверхности включает в себя одноканальные резервированные гидравлические необратимые рулевые приводы (РП) поступательного действия с механическим управлением и питанием от трех гидросистем.
Механическое управление рулевыми приводами осуществляет многоканальная резервированная электродистанционная система управления (ЭДСУ) по сигналам:
автоматической системы штурвального управления (АСШУ) с отработкой сигналов основного электродистанционного контура управления,
136 |
Глава 3. ГИДРАВЛИЧЕСКИЕ ПРИВОДЫ СИСТЕМ УПРАВЛЕНИЯ |
|
РУ |
|
|
|
ДПР |
|
ПР |
|
|
Слив |
|
|
|
в СДУ6 |
|
АСШУ |
|
|
|
КИСС |
|
|
|
СБО |
БУК-17 |
РА86 |
РП |
|
|
||
МСРП |
|
|
|
КЗА
механические связи
электрические связи
Элементы, не входящие
в комплект СДУ 6
 Слив
Слив 
Рис. 3.31. Структура системы управления рулевыми поверхностями:
РУ – рычаг управления; ДПР – датчик перемещения рычага; АСШУ – автоматизированная система штурвального управления; КИСС – комплексно-инфор- мационная система сигнализации; СБО – система бортового оборудования; МСРП – магнитная система регистрации параметров; КЗА – контрольно-записы-
вающая |
аппаратура; БУК17 – блок управления и контроля; РА86 – |
рулевой |
агрегат; РП – рулевой привод; ПР –поверхность рулевая |
включающего бортовую цифровую вычислительную машину (БЦВМ);
резервного электродистанционного контура управления, содержащего аналоговые вычислители АСШУ (при отказе БЦВМ);
непосредственно с рычагов управления с отработкой электрических сигналов аварийного злектродистанционного контура управления (при отказе АСШУ).
Органы управления при воздействии пилотов на рычаги управле-
ния (мини-штурвалы, педали, переключатели триммирования, рукоятка, интерцепторы) формируют совместно с АСШУ электрические управляющие сигналы для основного и резервного электродистанционных контуров управления и независимо от АСШУ – для аварийного электродистанционного контура.
Привод каждой рулевой поверхности включает:
3.3. Рулевые агрегаты и рулевые приводы |
137 |
а) одноканальные гидромеханические необратимые РП поступательного движения;
б) резервированную ЭДСУ; в) механическую проводку, связывающую РП с исполнительными
механизмами электродистанционных систем; г) датчики перемещения, формирующие электрические сигналы
для систем индикации на КИСС и регистрации в МСРП.
В составе ЭДСУ элеронов, руля направления, руля высоты, интерцепторов основным элементом является система дистанционного управления СДУ6; в ЭДСУ стабилизатора – привод автоматической балансировки ПАБ 204. В каждую СДУ6 входят датчик ДПР, блок БУК-17 и рулевой агрегат РА-86.
Рулевой агрегат РА86 является исполнительным механизмом дистанционных систем СДУ6, предназначенных для перемещения механической проводки управления золотниками рулевых приводов изделия «204». Гидравлическая схема РА-86 выделена на рис. 3.31 сплошным контуром.
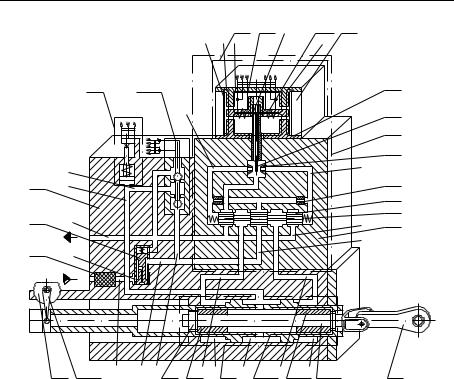
Рулевой агрегат РА86 является одноканальным электрогидравлическим устройством, преобразующим электрические управляющие сигналы в пропорциональную этим сигналам скорость перемещения выходного звена, и состоит из агрегата управления, исполнительного механизма ИМ1 с датчиком обратной связи ДОС1 и шатуна Ш1 (рис. 3.32).
Агрегат управления состоит из корпуса К1, входного фильтра Ф1, электрогидравлического усилителя У1, редукционного клапана КР1, сигнализатора давления СД1, электрогидравлического клапана КЭГ1.
Входной фильтр Ф1 предназначен для защиты агрегата от загрязнений при присоединении его к гидросистеме изделия.
Электрогидравлический усилитель У1 является двухкаскадным и преобразует управляющий сигнал (ток) в расход рабочей жидкости. В состав электрогидравлического усилителя входят: преобразователь сигналов ПС1, сопла У1.1, дроссели У1.2, золотник У1.3.
Первый каскад усиления – «сопло – заслонка» – выполнен по схеме гидравлического моста. Входным параметром первого каскада является ток управления, выходным – перепад давлений на торцах распределительного золотника У1.3. Второй каскад усиления – распределительный золотник У1.3, выходным параметром которого является расход рабочей жидкости, определяемый открытием рабочих окон.
138 |
|
|
|
Глава 3. |
ГИДРАВЛИЧЕСКИЕ ПРИВОДЫ СИСТЕМ УПРАВЛЕНИЯ |
|||||||||
|
|
|
|
|
|
|
|
|
ПС1 |
ПС1.1 |
ПС1.2 |
ПС1.3 |
ПС1.4 |
|
|
|
|
|
|
|
|
Фу2 |
|
Ф01 Фу1 |
|
|
Ф02 |
|
|
|
|
|
СД1 |
|
КЭГ1 |
|
|
|
|
|
|
|
|
ПС1.5 |
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
ПС1.6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У1.1 |
|
5 |
|
|
|
|
|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К1 |
6 |
|
|
|
|
|
|
|
|
|
|
|
|
У1.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У1.3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У1.4 |
КР1 |
7 |
|
|
|
|
|
|
|
|
|
|
|
У1.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
СЛИВ |
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ф1 |
|
Г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ПОДАЧА |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДОС 1 |
1 |
2 |
3 |
|
10 |
А |
В |
|
11 |
Б |
|
|
|
|
ДОС 1.1 |
|
ГП1 |
ГП1.1 |
|
ИМ1 |
ИМ1.1 |
ГП1.2 |
ГП1.3 |
|
Ш1 |
|||
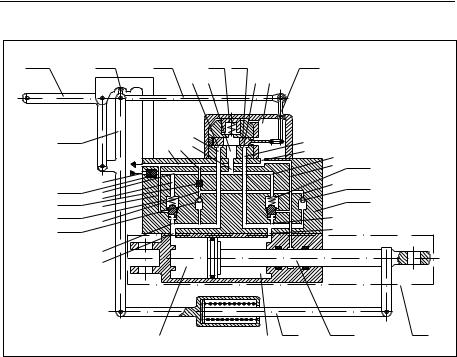
Рис. 3.32. Конструктивная схема рулевого агрегата РА-86:
К1 – корпус рулевого агрегата; Ф1 – входной фильтр; У1электрогидравлический усилитель; У1.1 – сопло; У1.2 – дроссель; У1.3 – золотник; У 1.4 - пружина; У1.5 – корпус усилителя; ПС1 – преобразователь сигналов; ПС1.1 – полюс; ПС1.2 – пружина; ПС1.3 – якорь; ПС1.4 – магнит; ПС1.5 – полюс; ПС1.6 – заслонка; ИМ1 – исполнительный механизм; ИМ1.1 – поршень; ГП1 – пружина; ГП1.1 – втулка; ГП1.2 – втулка; ГП1.3 – шток; КР1 – клапан редукционный; СД1 – сигнализатор давления; КЭГ1 – клапан электрогидравлический; ДОС1 – датчик обратной связи; ДОС1.1 – поводок; Ш1 – шатун; 1–12 – каналы и линии связи
Впреобразователе ПС1 электрический сигнал (ток) преобразуется
впропорциональное ему перемещение заслонки ПС1.6. Заслонка ПС1.6 с соплами У1.1 и дросселями У1.2. при отклонении ее от ней-
трального положения изменяет давление на торцах золотника У1.3. Золотник У1.3 распределяет рабочую жидкость по полостям исполнительного механизма ИМ1. Редукционный клапан КР1 поддерживает на
3.3. Рулевые агрегаты и рулевые приводы |
139 |
постоянном уровне давление рабочей жидкости в агрегате независимо от изменения давления на его входе. Сигнализатор давления СД1 срабатывает при понижении рабочего давления до определенного значения.
Электрогидравлический клапан КЭГ1 предназначен для соединения напорной гидролинии с гидропружиной ГП1 исполнительного механизма ИМ1.
Исполнительный механизм ИМ1 двустороннего действия преобразует давление рабочей жидкости в механическую энергию поступательного движения поршня ИМ1.1. Усилие с поршня ИМ1.1 передается на шток ГП1.3.
Гидропружина ГП1 дает возможность поршню ИМ1.1 работать со штоком ГП1.3 как единое целое, если противодействующая нагрузка на штоке ГП1.3 не превышает усилия, развиваемого гидропружиной.
Шатун Ш1 является выходным звеном агрегата и служит для передачи усилия с агрегата на тягу механической проводки управления.
При наличии давления в гидросистеме рабочая жидкость от штуцера ПОДАЧА через входной фильтр Ф1 по каналу I поступает к редукционному клапану КР1 и далее по каналам 2, 3 к электрогидравлическому клапану КЭГ1, каналу 4, к средней проточке золотника У1.3.
При включенном клапане КЭГ1 рабочая жидкость под редуцированным давлением поступает:
по каналу 5 к сигнализатору давления СД1;
по каналу 6 в полость В гидропружины ГП1. Втулки ГП1.1 и ГП1.2 под действием давления рабочей жидкости разжимаются до упора в торцы поршня ИМ1.1 и штока ГП1.3, осуществляя тем самым
связь поршня ИМ1.1 со штоком ГШ.3.
При наличии тока управления, компенсирующего технологическое смещение нуля, заслонка ПС1.6 занимает симметричное положение между соплами У1.1. Сопротивления истечению рабочей жидкости из сопл равны, следовательно, равны давления в каналах 8, 9 и на торцах золотника У1.3. При этом в полостях А и Б исполнительного механизма ИМ1 отсутствует перепад давления рабочей жидкости и поршень ИМ1.1 при этом будет неподвижен.
При подаче тока управления (отличного от смещения нуля) в обмотке преобразователя сигналов ПС1 заслонка ПС1.6 отклоняется от симметричного положения и занимает положение, соответствующее значению и направлению тока управления.
140 |
Глава 3. ГИДРАВЛИЧЕСКИЕ ПРИВОДЫ СИСТЕМ УПРАВЛЕНИЯ |
При отклонении заслонки ПС1.6 влево от симметричного положения зазор между левым соплом и заслонкой уменьшается, а между правым соплом и заслонкой увеличивается (на схеме заслонка показана в симметричном положении относительно сопл).
Сопротивление истечению рабочей жидкости из левого сопла увеличивается, а из правого – уменьшается. При этом давление в канале 8 растет, а в канале 9 снижается. На торцах золотника У1.3 возникает перепад давлений. Под действием перепада давлений золотник У1.3 смещается вправо от нейтрального положения и рабочая жидкость по каналу 10 поступает в полость А. При поступлении рабочей жидкости в полость А поршень ИМ1.1 перемешается вправо на выдвижение. В это же время из полости Б рабочая жидкость по каналу 11, золотнику У1.3, каналам 12, 7 поступает в сливную гидролинию. Усилие передается через торец поршня ИМ1.1 на втулку ГП1.1, рабочую жидкость, втулку ГП1.2, торец штока ГП1.3 и далее на шатун Ш1. При движении поршня ИМ1.1 поворачивается поводок ДОС1.1 обратной связи ДОС1.
При этом с датчика на усилитель системы управления подается сигнал, уменьшающий ток управления в обмотках преобразователя сигналов ПС1. Упругий элемент преобразователя сигналов (пружина) возвращает заслонку ПС1.6 в исходное положение. Сопротивления истечению рабочей жидкости из сопл выравниваются. Следовательно, выравниваются давления на торцах золотника. Золотник У1.3 под действием пружин У1.4 возвращается в нейтральное положение. Прекращается подача рабочей жидкости в полость А, и поршень ИМ1.1 останавливается.
При отклонении заслонки ПС1.6 вправо от симметричного положения, золотник У1.3 аналогично описанному выше смещается влево. В результате рабочая жидкость поступает в полость Б исполнительного механизма. Поршень Ш1.1 перемещается влево (на втягивание), и усилие передается через поршень ИМ1.1 и втулку ГП1.2, рабочую жидкость полости В, втулку ГП1.1 на шток ГП1.3 и далее на шатун Ш1.
Параметры агрегата РА-86 |
|
Рабочая жидкость |
НГЖ-4 |
Давление рабочей жидкости, МПа (кгс/см2): |
|
в напорной гидролинии на входе в агрегат |
|
номинальное по ОСТ I 00095-73 |
20,6 (210) |
в сливной гидролинии на выходе из агрегата |
|
номинальное |
0,98(10) |
3.3. Рулевые агрегаты и рулевые приводы |
141 |
Максимальный ход выходного звена агрегата |
|
относительно геометрической нейтрали, мм |
(15 0,25) |
Скорость перемещения выходного звена агрегата |
|
при отсутствии внешней нагрузки и управляющем |
|
сигнале ( 18) мА, |
21,5 4,5 |
Максимальная скорость перемещения выходного |
|
звена агрегата при отсутствии внешней нагрузки |
|
и управляющем сигнале (±50) мА, |
37,5±8,5 |
Усилие, развиваемое на выходном звене агрегата, |
|
Н (кгс) |
2400 240 (245 25) |
Масса агрегата, заполненного рабочей жидкостью, кг, |
|
не более |
5,3 |
Одноканальный рулевой привод РП95 является необратимым, следящим, гидромеханическим силовым приводом дроссельного регулирования с поступательным движением выходного звена. Агрегат предназначен для отклонения элеронов, руля высоты, интерцепторов и воздушных тормозов. Гидравлическая схема привода показана на рис. 3.31 пунктирным контуром.
Агрегат состоит из корпуса К1, входного фильтра Ф1, распределительного устройства Р1, исполнительного механизма ИМ1, перепускных и подпиточных клапанов КП и КПП, фильтра Ф2 и системы рыча-
гов (рис. 3.33).
Входной фильтр Ф1 защищает агрегат от монтажных загрязнений при присоединении его к гидросистеме.
Распределительное устройство Р1 регулирует расход и распределяет рабочую жидкость по полостям исполнительного механизма ИМ1 пропорционально изменению управляющего сигнала и представляет собой плоский золотник Р1.1, перемещающийся в зазоре, образованном пластиной, подпружиненной пятой и опорным кольцом. Величины перекрытий окон «а» и «б» в пластине рабочими кромками золотника создают определенную зону нечувствительности привода.
Исполнительный механизм ИМ1 преобразует энергию давления рабочей жидкости в механическую энергию поступательного движения поршня и передает развиваемое усилие через серьгу штока на управляемую поверхность.
Клапаны КП1 и КП2 плунжерного типа предназначены для предохранения полостей исполнительного механизма от забросов давления рабочей жидкости, возникающих в результате несинхронной работы золотников распределительных устройств параллельно работающих
142 |
|
|
Глава 3. |
ГИДРАВЛИЧЕСКИЕ ПРИВОДЫ СИСТЕМ УПРАВЛЕНИЯ |
|||||||
приводов, и для обеспечения перемещения штока при отключенном |
|||||||||||
гидропитании. |
|
|
|
|
|
|
|
|
|
||
СР1.1 |
|
СР1.2 |
СР1.4 |
|
|
Р1 |
Р1.1 |
|
СР1.5 |
|
|
|
|
|
|
|
б |
А |
а |
Б |
|
|
|
|
|
О1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
СР1.3 |
|
11 |
16 |
3 |
|
|
|
8 |
|
|
|
|
|
|
|
|
10 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
слив |
|
|
|
|
|
5 |
|
|
|
|
О2 |
|
|
|
|
|
13 |
|
|
|
|
|
подача |
|
|
|
|
|
КП2 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
15 |
КПП2 |
|
|
Ф1 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ф2 |
4 |
|
|
|
|
|
|
|
К1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
КП1 |
|
|
|
|
|
|
|
18 |
|
|
|
|
14 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КПП1 |
|
|
|
|
|
|
|
9 |
|
|
|
|
17 |
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|
|
|
|
|
|
|
|
|
|
О3 |
|
|
|
|
|
|
|
|
|
|
|
|
В |
|
|
|
|
СР1.6 |
ИМ1.1 |
ИМ1 |
|
|
|
|
|
|
|
|
Г |
|
|
|
|
|
|
Рис. 3.33. Конструктивная схема привода РП-95: |
|
||||||||
К1 – корпус рулевого привода; Ф1 – входной фильтр; Ф2 – фильтр; Р1 – распредели- |
|||||||||||
тельное устройство;Рис1..41.4–. Гидравлическзолотник распределительногоя инцип альная схемаустройствап ивода РП;95ИМ1 – испол- |
|||||||||||
нительный механизм; ИМ1.1 – шток исполнительного механизма; КП1, КП2 – пере- |
|||||||||||
пускные клапаны; КПП1, КПП2 – подпиточные клапаны; СР1.1 – входная качалка; |
|||||||||||
СР1.2 – ограничитель хода золотника; СР1.3 – дифференциальная качалка; СР1.4 – |
|||||||||||
тяга золотника; СР1.5 – рычаг золотника; СР1.6 – тяга обратной связи; 1–18 – каналы |
|||||||||||
|
|
|
|
|
и линии связи |
|
|
|
|
||
Подпиточные клапаны КПП1 и КПП2 шарикового типа обеспечивают подпитку полостей исполнительного механизма ИМ1 из сливной гидролинии при падении давления в напорной гидролинии и движении штока.
Фильтр Ф2 защищает полости исполнительного механизма ИМ1 от монтажных загрязнений рабочей жидкости, поступающей из сливной гидролинии.
Система рычагов передает движение от входной качалки СР1.1 к рычагу золотника СР1.5 распределительного устройства Р1 и осуществляет жесткую обратную связь.