

43.Последовательные корректирующие устройства и их влияние на динамику сау

Wж(S)=W(s)= Wк(s) Wо(s) (1)
1)введение производной от ошибки:
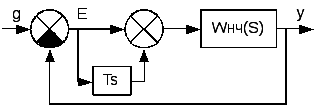
W(s)=(1+Ts)Wo(s) (2)
|W(jw)|=|Wo(jw)|(1+T2w2)^1/2 (3)
φ(w)=φo(w)+arctgTw (4)
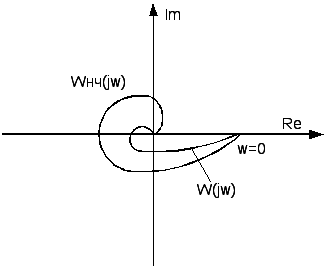
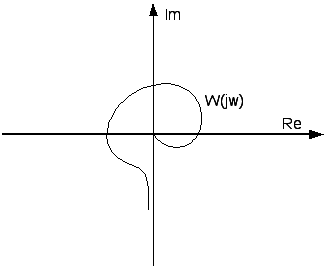
Существенным при такой коррекции является то, что при введении производной системой вводится дополнительный положительный фазовый сдвиг, в результате чего АФХ разомкнутой системы дополнительно разворачивается против часовой стрелки, увеличивая запас устойчивости (по фазе и по амплитуде).
Введение производной от ошибки может неустойчивую замкнутую систему сделать устойчивой.
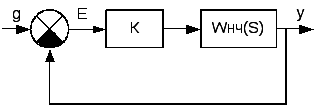
2)увеличение общего коэффициента усиления К разомкнутой системы:
Wo(0)=Ko
ξст=y0/(1+KKo) (5) (чем выше коэффициент, тем ниже ошибка)
Фξ(0)= 1/(1+KKo)
3)введение интеграла от ошибки:
Цель – увеличение точности за счет увеличения порядка астатизма.
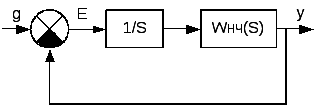
W(s)=Wo(s)/s (6)
|W(jw)|=|Wo(jw)|/w (7)
φ(w)=φo(w)-90º (8)
ПИД-регулятор:
u(t)=Kпξ(t)+KИ∫ξ(t)dt+KДdξ(t)/dt (9)
W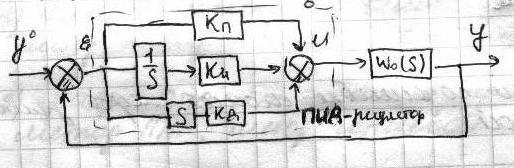 k(s)=K(Ts+1)/s
k(s)=K(Ts+1)/s
КП=КТ
КИ=К
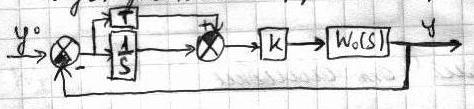
Изодромное корректирующее устройство:
55.Расчет движения изображающей точки на фазовой траектории
Для наглядного представления о сложных нелинейных процессах управления часто прибегают к понятию фазового пространства, которое заключается в следующем. Дифференциальное уравнение замкнутой системы n-го порядкаможно преобразовать к системе n дифференциальных уравнений первого порядка в виде:
dx1/dt=Ф1(x1,x2,…,xn,f,g),
dx2/dt=Ф2(x1,x2,…,xn,f,g),
…………………………
dxn/dt=Фn(x1,x2,…,xn,f,g) (1)
с начальными условиями x1=x10, x2=x20,…,xn=xn0 при t=0,
где x1,x2,…,xn— переменные, являющиеся искомыми функциями времени, причем x1, может обозначать управляемую величину, а x2,…,xn — вспомогательные переменные; f и g - возмущающее и задающее воздействия.
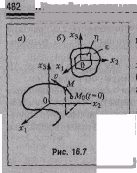
|Пустъ, например, в уравнениях будет и = 3 (система третьего порядка). Переменные x1,x2,x3 здесь могут иметь любой физический смысл. Но условно их представить как прямоугольные координаты некоторой точки М.
В реальном процессе управления в каждый момент времени величины x1,x2,x3 имеют вполне определенные значения. Это соответствует вполне определенному положению точки М в пространстве. С течением времени в реальном процессе x1,x2,x3 определенным образом изменяются. Это соответствует перемещению точки М в пространстве по определенной траектории. Следовательно, траектория движения точки М может служить наглядной геометрической иллюстрацией поведения системы в процессе управления.
Точка М называется изображающей точкой, ее траектория называется фазовой траекторией, а пространство (x1,x2,x3 ) называется фазовым пространством.
Так как производные по времени от координат точки представляют проекции ее v на оси координат, то дифференциальные уравнения системы (1) представляют собой выражения для проекций скорости v изображающей точки М на оси координат. Следовательно, по значениям правых частей уравнений в каждый момент времени можно судить о направлении движения изображающей точки М, а вместе с тем и о поведении соответствующей реальной системы.
Если переменных в уравнениях (1) будет всего две x1 и x2 (система второго порядка), то изображающая точка будет двигаться не в пространстве, а на плоскости (фазовая плоскость).
Если переменных в уравнениях (1) будет любое число n>3 (система второго порядка), то фазовое пространство будет не трехмерным, а n-мерным.
Итак, фазовое пространство и фазовые траектории представляют собой лишь геометрический образ процессов, протекающих в системе. В этом геометрическом представлении участвуют координаты и исключено время. Фазовая траектория сама по себе дает лишь качественное представление о характере поведения системы. Чтобы определить количественно положение изображающей точки (а значит, и состояние системы) в любой момент времени, нужно найти решение заданных дифференциальных уравнений (1) во времени.
Если уравнения (1) составлены в отклонениях от установившегося состояния, то последнее характеризуется значениями x1=x2=…=xn=0. Следовательно, изображением установившегося состояния системы является начало координат фазового пространства.
Отсюда вытекает, что фазовые траектории устойчивой линейной системы будут асимптотически приближаться к началу координат при неограниченном увели времени. Фазовые траектории неустойчивой линейной системы будут удаляться от начала координат.
Для нелинейной системы вследствие ряда особенностей процессов, отмечавшихся выше, фазовые траектории могут принимать самые разнообразные очертания. Если имеется асимптотическая устойчивость для определенного круга начальных условий, то все фазовые траектории, которые начинаются внутри определенной области η, окружающей начало координат фазового пространства , будут асимптотически приближаться к началу координат. Если устойчивость неасимптотическая, то фазовые траектории, начинающиеся внутри области η могут иметь любые очертания, но не будут выходить за пределы некоторой определенной области ξ, окружающей начало координат.