-
Структуры систем автоматического управления
Управление – процесс воздействия на объект управления с целью изменения его поведения нужным образом за конечный отрезок времени.
Регулирование – частный случай управления, при котором требуемое течение процесса создается путем стабилизации одной или нескольких координат на заданном уровне.
Система – соединение элементов и устройств в структуру определенного функционального назначения.
Система управления – соединение элементов и устройств для выполнения функций управления.
Цель управления – желаемый конечный результат движения или конечное состояние процесса, которое достижимо в пределах некоторого интервала времени.
ТАУ – дисциплина, в рамках которой изменяются свойства САУ, разрабатываются принципы расчета и построение таких систем.
Функциональные элементы САУ:
1) Объект управления (ОУ) с регулирующим органом.
Объект управления – техническое устройство, установка или процесс, поведение которого нас не устраивает по каким-либо причинам или которое подлежит управлению (станки, двигатели, машины, транспортные средства, производственные процессы, химические и механические системы, экологические процессы).
1)одномерный – имеется одна входная и одна выходная координата
2)многомерный – имеется несколько входов и выходов.
Регулирующий орган (РО) – техническое устройство, обычно часть ОУ, с помощью которого производят изменение координат управляемого процесса.
2)Исполнительный механизм (привод) – непосредственно влияющий на объект и приводящий в действие РО.
3)Управляющее устройство (УУ) (регулятор) – предназначен для выработки управляющего воздействия (сигнала) по определенному алгоритму на исполнительный механизм.
4)Задающее устройство (ЗУ) (задатчик) – вырабатывает сигнал, соответствующий желаемому значению регулируемой координаты.
5)Датчик (Д) (информационно измерительный элемент) – для измерения выходных координат ОУ или элементов системы.
x(t) – задающее воздействие, желаемое значение
z(t) – регулирующее воздействие
u(t) – управляющее воздействие
y(t) – управляемая величина, выходные координаты ОУ, достаточное изменение величины, которая отражает реакция ОУ, направленное воздействие
Воздействие – влияние одного объекта на другое, вызывающее в последующем изменение его свойств и состояния.
Координатами управления называется изменение во времени по определенному закону наиболее существенных показателей процесса, характеризующие его состояние.
Возмущающее воздействие – отражает случайное воздействие окружающей среды на любой элемент САУ, которое часто невозможно измерить, контролировать. Компенсация действия возмущения приводит к необходимости создания САУ.
52.Метод фазового пространства. Общие понятия.
При исследовании нелинейных систем их дифференциальные уравнения обычно представляют в нормальной форме Коши в виде систем уравнений 1-го порядка.
dxi/dt=Фi(x1,…,xn,g(t),f(t)), i=1,n (1)
g(t) – задающее воздействие
f(t) – возмущение
Для исследований свободной составляющей переходного процесса, вызванной начальным отклонением фазовых координат и при отсутствии внешних воздействий уравнение (1) преобразуется к следующему виду:
dxi/dt=Фi(x1,…,xn), i=1,n (2)
Для исследования нелинейных систем широко применяется метод фазового пространства (n-мерное пространство в фазовых координатах).
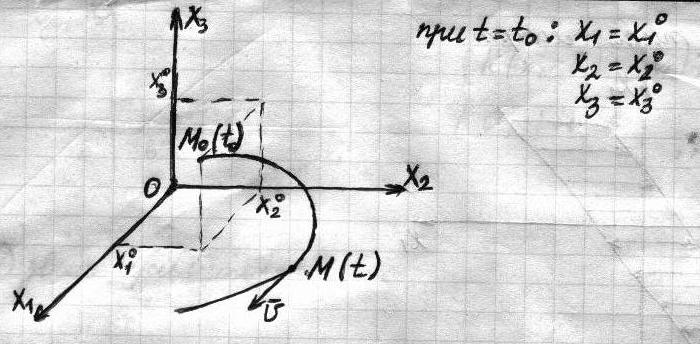
В фазовом пространстве начальному состоянию соответствует Мо, а сам процесс во времени, т.е. решение уравнения (2) изображается в виде некоторой кривой, которая называется фазовой траекторией системы.
М – изображающая точка
Если в многомерном фазовом пространстве можно лишь мысленно представить фазовое пространство, то для системы 2-го порядка можно реально траекторию изобразить на фазовой плоскости.
Уравнение (2) при n=2 имеет вид:
dx1/dt=Ф1(x1,x2)
dx2/dt=Ф2(x1,x2) (3)
Дифференциальное уравнение фазовой траектории получается из системы (3)
dx2/ dx1= Ф2(x1,x2)/ Ф1(x1,x2) (4) – уравнение фазовой траетории
dx1/dt=0
dx2/dt=0
Ф1(x1,x2)=0
Ф2(x1,x2)=0 (5) – точка равновесия
Точки равновесного состояния системы – особые точки на фазовой плоскости.
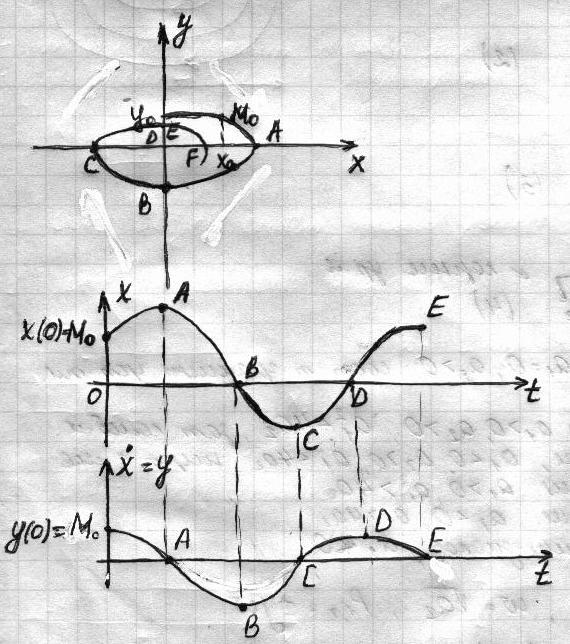
Пример:
dx/dt=y
dy/dt= Ф(x,y) (6)
В этом случае для изображения точки справедливы следующие правила определения направления движения фазовой траектории:
1)траектория всегда направлена по часовой стрелке.
2)ось х пересекается фазовой траекторией по углом 90 град, т.к. в точках пересечения скорость у=0 имеет место max или min величины х.