

4.3 Математические модели дискретных (цифровых) сау
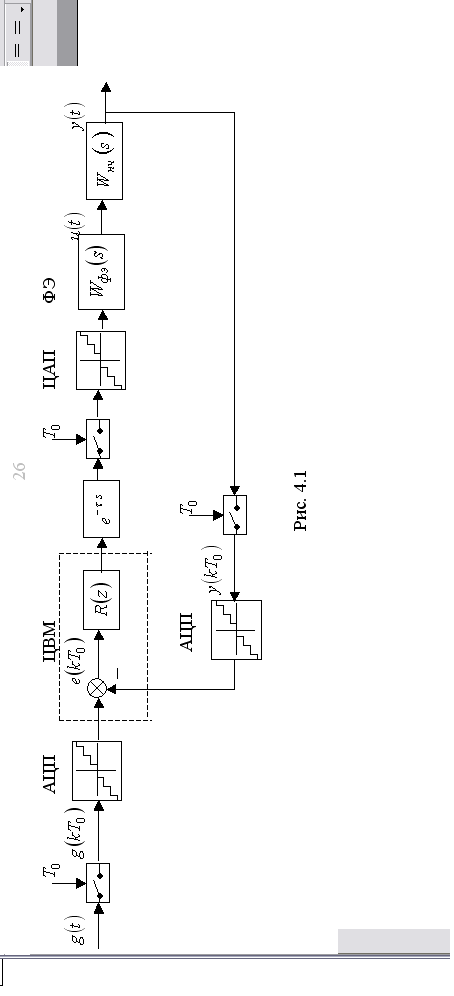
Структурная схема цифровой САУ
представлена на рис. 4.1. Она включает в
себя непрерывную часть системы
(управляемый объект, датчики и
исполнительные механизмы) с передаточной
функцией
![]()
![]() и управляющую ЦВМ, реализующую заданный
закон управления в соответствии с
некоторой дискретной передаточной
функцией
и управляющую ЦВМ, реализующую заданный
закон управления в соответствии с
некоторой дискретной передаточной
функцией![]() .
.
В отличие от непрерывных САУ здесь
сигналы, поступающие в ЦВМ, принимают
дискретные значения в дискретные моменты
времени. Квантование по времени
представляет собой периодический
процесс, характеризующийся тактом
дискретности Т0
.На рис. 4.1этот процесс
осуществляется с помощью импульсного
ключа, который замыкается на короткое
время с шагом дискретностиТ0
,производит отсчеты
амплитуды непрерывного сигнала в моменты
времени
![]() Далее в аналого-цифровом преобразователе
(АЦП) значения амплитуд непрерывного
сигнала преобразуются в цифровой код,
т.е. осуществляется процесс квантования
сигналов по уровню с шагом квантования,
определяемым разрядностью АЦП.
Преобразованные входные данные поступают
далее в ЦВМ, где они обрабатываются по
запрограммированным алгоритмам, в
результате чего формируются выходные
данные, т.е. ЦВМ реализует некоторый
цифровой фильтр. По отношению к дискретным
отсчетам входных данных выходные данные
формируются с задержкой
Далее в аналого-цифровом преобразователе
(АЦП) значения амплитуд непрерывного
сигнала преобразуются в цифровой код,
т.е. осуществляется процесс квантования
сигналов по уровню с шагом квантования,
определяемым разрядностью АЦП.
Преобразованные входные данные поступают
далее в ЦВМ, где они обрабатываются по
запрограммированным алгоритмам, в
результате чего формируются выходные
данные, т.е. ЦВМ реализует некоторый
цифровой фильтр. По отношению к дискретным
отсчетам входных данных выходные данные
формируются с задержкой![]() .Эта задержка равна времени, затрачиваемому
на аналого-цифровое преобразование
сигналов, поступающих с датчиков, и
последующую их обработку в ЦВМ. В
структурной схеме это учитывается путем
включения в контуры управления звеньев
чистого запаздывания с передаточной
функцией
.Эта задержка равна времени, затрачиваемому
на аналого-цифровое преобразование
сигналов, поступающих с датчиков, и
последующую их обработку в ЦВМ. В
структурной схеме это учитывается путем
включения в контуры управления звеньев
чистого запаздывания с передаточной
функцией![]() .Так как интервалы
.Так как интервалы![]() ,
обычно значительно меньше постоянных
времени непрерывной части САУ, ими, как
правило, пренебрегают.
,
обычно значительно меньше постоянных
времени непрерывной части САУ, ими, как
правило, пренебрегают.
Так как исполнительные механизмы цифровых САУ обычно имеют аналоговый вход, выходные данные ЦВМ поступают на вход цифро-аналогового преобразователя (ЦАП), осуществляющего преобразование цифрового кода в непрерывный сигнал. Данный процесс преобразования обычно включает в себя две операции: декодирование – преобразование числового кода в импульсный сигнал с амплитудно-импульсной модуляцией и экстраполяцию – преобразование импульсного сигнала в аналоговый сигнал.
Процесс декодирования сопровождается квантованием сигналов по уровню в соответствии со статической характеристикой ЦАП. При этом, нелинейный эффект квантования (см. рис. 4.1)обусловлен тем, что число разрядов управляющей ЦВМ обычно больше, чем у ЦАП, а это эквивалентно внесению ошибок округления.
Процесс экстраполяции, как правило,
представляет собой фиксацию выходного
сигнала ЦВМ на одном уровне в течение
периода дискретности T0
.На рис. 4.1 процессу экстраполяции
соответствует фиксирующий элемент (ФЭ)
с передаточной функцией![]() .
.
В ряде случаев для лучшего сглаживания выходных сигналов ЦВМ, кроме фиксации, могут использоваться и другие виды экстраполяции (линейная, квадратичная и т. п.).
Таким образом, в цифровых САУ обрабатываемые сигналы подвергаются квантованию по уровню на трёх этапах: в АЦП, ЦВМ и ЦАП, что является причиной возникновения нелинейностей. Как известно, теоретический анализ влияния даже одной нелинейной характеристики на динамические и статические свойства САУ сопряжён со значительными трудностями. Тем более сложную задачу представляет исследование всех эффектов, связанных с квантованием по уровню в цифровом контуре управления. При исследовании таких систем обычно предполагают, что ошибки квантования случайны и распределены по равномерному закону, либо просто рассматривается наихудший вариант, когда все ошибки квантования принимают максимально возможные значения. Однако, наиболее достоверным и универсальным средством для анализа подобных нелинейностей является математическое моделирование.
Математическая модель АЦП обычно
представляется в виде схемы (рис. 4.2),
где
![]() - ошибка управления;
- ошибка управления;![]() - дискретные значения сигнала
- дискретные значения сигнала![]() в моменты времени
в моменты времени![]() - шум квантования;
- шум квантования;![]() - шаг квантования по уровню, определяемый
разрядностью АЦП;
- шаг квантования по уровню, определяемый
разрядностью АЦП;
![]() - сигнал на выходе АЦП.
- сигнал на выходе АЦП.

![]()

![]()
![]()
![]()











![]()
Рис. 4.2
Разрядность АЦП выбирают таким образом, чтобы погрешность квантования была меньше статических и динамических ошибок датчиков. При этом разрядность ЦАП должна быть согласована с разрядностью АЦП. Целесообразно задавать её такой, чтобы изменение управляющей переменной на один шаг вызывало (после прохождения через непрерывную часть системы) изменение кода в АЦП на единицу младшего разряда. Учитывая также, что разрядность современных управляющих ЦВМ значительно превышает разрядность слов АЦП и ЦАП, нежелательные явления, обусловленные квантованием по уровню в цифровых контурах управления, могут быть практически устранены. В связи с этим, в дальнейшем эффекты квантования по уровню в цифровых САУ не учитываются и рассматриваются сигналы, дискретные только во временной области.
Непрерывная часть цифровой САУ в совокупности с ЦАП образуют так называемую приведённую непрерывную часть (ПНЧ) цифровой системы. При этом, уравнения ЦАП и непрерывной части цифровой САУ соответствуют структурной схеме (рис. 4.3), где
![]() -
дискретные отсчёты сигнала управления;
-
дискретные отсчёты сигнала управления;![]() - выход идеального импульсного элемента
(ИИЭ), т. е. амплитудно-модулированная
последовательность
- выход идеального импульсного элемента
(ИИЭ), т. е. амплитудно-модулированная
последовательность![]() -функций;
-функций;
![]()
![]() - передаточная функция фиксирующего
элемента ФЭ;
- передаточная функция фиксирующего
элемента ФЭ;
![]()
![]() - последовательность прямоугольных
импульсов длительности
- последовательность прямоугольных
импульсов длительности![]() с амплитудами
с амплитудами![]() в дискретные моменты времени
в дискретные моменты времени![]() ;
;
![]()
![]() - передаточная функция непрерывной
части системы (НЧ)
;
- передаточная функция непрерывной
части системы (НЧ)
;
![]() - выход САУ.
- выход САУ.



 T0ИИЭ
ФЭ НЧ
T0ИИЭ
ФЭ НЧ
![]()
![]()




 u(t)
u(t)![]()
![]()
![]()
![]()


ПНЧ

Рис. 4.3
Зависимость между
![]() и
и![]() записывается в виде
записывается в виде
![]() (4.33)
(4.33)
где
![]() - весовая функция приведённой непрерывной
части (ПНЧ) САУ, включающей в себя ФЭ и
НЧ. В дискретные моменты времени
- весовая функция приведённой непрерывной
части (ПНЧ) САУ, включающей в себя ФЭ и
НЧ. В дискретные моменты времени![]() :
:
![]() (4.34)
(4.34)
Переходя к z-преобразованию, можно перейти от уравнения (4.34) к выражению:
![]() (4.35)
(4.35)
где

Дискретная передаточная функция ПНЧ
![]() в уравнении (4.35) может быть найдена с
помощью соотношения:
в уравнении (4.35) может быть найдена с
помощью соотношения:
![]() (4.36)
(4.36)
где символ
![]() означаетz-преобразование
для переходной функции
означаетz-преобразование
для переходной функции![]() непрерывной части САУ, изображение по
Лапласу которой равно
непрерывной части САУ, изображение по
Лапласу которой равно![]() .
Как правило, при вычислении
.
Как правило, при вычислении![]() по формуле (4.36) удобнее представить
изображение
по формуле (4.36) удобнее представить
изображение![]() в виде суммы простейших дробей, после
чего уже воспользоваться известными
правиламиz-преобразования.
в виде суммы простейших дробей, после
чего уже воспользоваться известными
правиламиz-преобразования.
Синтез передаточной функции
![]() цифрового регулятора (дискретного
корректирующего устройства) осуществляется
прямыми методами или на основе аналогового
прототипа []. В последнем случае
предварительно находится передаточная
функция
цифрового регулятора (дискретного
корректирующего устройства) осуществляется
прямыми методами или на основе аналогового
прототипа []. В последнем случае
предварительно находится передаточная
функция![]() аналогового прототипа, после чего
производится замена
аналогового прототипа, после чего
производится замена![]() (метод «прямоугольников») или
(метод «прямоугольников») или![]() (метод «трапеций» или преобразование
Тастина). Полученная таким образом
передаточная функция
(метод «трапеций» или преобразование
Тастина). Полученная таким образом
передаточная функция
 (4.37)
(4.37)
связывает между собой изображение
сигнала ошибки
![]() и управляющего воздействия
и управляющего воздействия![]() ,
что эквивалентно разностному уравнению
,
что эквивалентно разностному уравнению
![]() (4.38)
(4.38)
где
![]()
Пример 4.1. Пусть непрерывная часть САУ (см. рис. 4.3) имеет передаточную функцию
![]()
В результате синтеза аналогового
корректирующего устройства
![]() (аналогового
прототипа) по желаемой передаточной
функции замкнутой САУ
(аналогового
прототипа) по желаемой передаточной
функции замкнутой САУ
![]()
получаем
![]()
Используя преобразование Тастина, из последнего выражения находим дискретную передаточную функцию цифрового корректирующего устройства (для T0=0,025 с)
![]()
Соответствующее разностное уравнение имеет вид:
![]()
Для динамических систем произвольного порядка z-передаточ- ная функция разомкнутой САУ имеет вид
 (4.39)
(4.39)
При этом для статических дискретных систем в соответствии с теоремой о конечном значении можно определить статический коэффициент передачи
![]() (4.40)
(4.40)
Для астатических систем
![]() -го
порядка астатизма дискретная
передаточная функция имеет приz
= 1полюс
-го
порядка астатизма дискретная
передаточная функция имеет приz
= 1полюс![]() -й
кратности:
-й
кратности:
 (4.41)
(4.41)
Астатический коэффициент передачи определяется соотношением
![]() (4.42)
(4.42)
Нетрудно показать,что
степень полинома знаменателя![]() по
по![]() равна степени полинома знаменателя
равна степени полинома знаменателя![]() по
по![]() ,
изменение нулей в
,
изменение нулей в![]() меняет лишь числитель
меняет лишь числитель![]() и не оказывает влияния на знаменатель,
а изменение знаменателя
и не оказывает влияния на знаменатель,
а изменение знаменателя![]() полностью изменяет
полностью изменяет![]() .
.
Введем понятие дискретной передаточной функции применительно к цифровым многосвязным САУ.
Матричная структурная схема дискретной
многосвязной САУ показана на рис.
4.4. Здесь![]() передаточная матрица многосвязного
объекта управления (непрерывная часть
многосвязной САУ);R(z)
- передаточная матрица дискретного
регулятора, определяющая связь между
изображениями его входа и выхода.
передаточная матрица многосвязного
объекта управления (непрерывная часть
многосвязной САУ);R(z)
- передаточная матрица дискретного
регулятора, определяющая связь между
изображениями его входа и выхода.


![]()
![]() ФЭ НЧ
ФЭ НЧ

![]()
![]()
![]()











![]()


Рис. 4.4
Рассматривая выходные величины
![]() (i=1,…,p;
p - число
выходов НЧ) многосвязной САУ в дискретные
моменты времени
(i=1,…,p;
p - число
выходов НЧ) многосвязной САУ в дискретные
моменты времени![]() z-передаточную
матрицу приведённой непрерывной части
системы с учетом фиксирующих элементов
ФЭ можно записать в виде
z-передаточную
матрицу приведённой непрерывной части
системы с учетом фиксирующих элементов
ФЭ можно записать в виде
![]()
![]()
где символ
![]() означаетz-преобразование
для матричной переходной функции
означаетz-преобразование
для матричной переходной функции![]() многосвязного объекта управления,
которая, в свою очередь, является
оригиналом для изображения по Лапласу
многосвязного объекта управления,
которая, в свою очередь, является
оригиналом для изображения по Лапласу![]() ,
т.е.
,
т.е.
![]()
Выражение
![]() (4.43)
(4.43)
можно рассматривать как дискретную передаточную матрицу многосвязной САУ в разомкнутом состоянии. Соответственно дискретная передаточная матрица Ф(z) замкнутой системы определяется соотношением
![]() (4.44)
(4.44)
откуда следует, что характеристическое уравнение замкнутой дискретной МСАУ имеет вид
![]() (4.45)
(4.45)
Другой способ определения передаточной функции системы дает описание дискретной САУ в терминах переменных состояния.
Действительно, по аналогии с непрерывными системами дискретные системы в целом или отдельные их части могут быть описаны системами векторных конечно-разностных уравнений вида
![]() (4.46)
(4.46)
где x -n-мерный вектор состояния системы;g-m-мерный вектор задающих воздействий (входов) системы;y p-мерный вектор управляемых координат; матрицы соответствующих размерностей:
A - собственная![]() -матрица системы,B
-матрица системы,B
![]() -матрица управления,С -
-матрица управления,С -
![]() -матрица
выхода.
-матрица
выхода.
Применив операцию z-преобразования к уравнениям (4.46),получим
![]() (4.47)
(4.47)