

Принцип работы мп
Выделяют процессы.
обработка команды.
обработка цифровой информации.
Работа мп-ра при обработке команды управления.
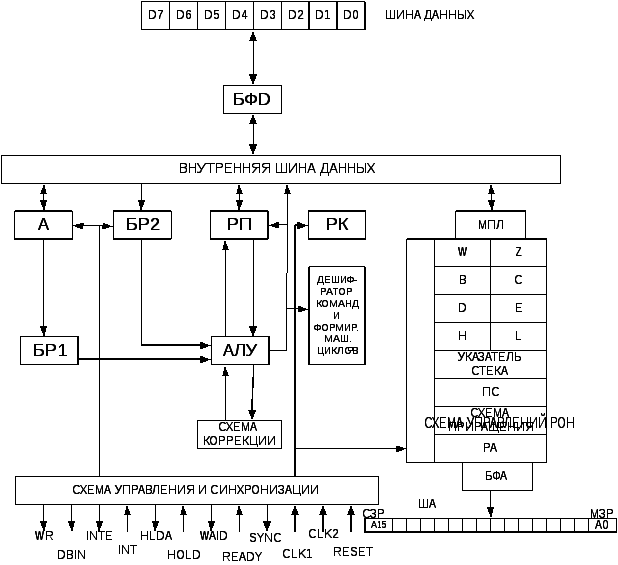
При запуске МП-ра ПС устанавливается на номер первой команды программы управления. Этим номером служит номер ячейки памяти в хранится эта первая команда. Ч\з регистр адреса и буфер адреса на шине адреса выставляется цифровой код адреса. Схема управления и синхронизации формирует команду чтения, которая передается по шине управления и т.к. эта шина связана со всеми блоками, то эта команда пойдет ко всем блокам , но ее будет воспринимать тот блок на настроен адрес, обычно ПЗУ будет выдавать содержащие команды на шине данных и эта команда ч\з буфер ШД и внутреннюю шину МП-ра направляется.
Исполнительная часть команды в регистр команд. Адресная часть в программно недоступные р WZ .
Команда:
исполнительная часть: адресс1; адрес 2;
Адрес 1 – адрес получателя информации обработанной МП- ром записи в регистр W
Адрес 2 – адрес исходной информации.
Работа МП – ра по обработке исходных данных.
При обработке одних из циклов выполнении команды содержания регистра Z переносится в регистр адреса. На шине адреса выставляется адресс источника информации. Другим минимальным циклом схема превращения и синх-ци формирует команду чтения по, которой на шине данных появляется числовой сигнал, который формирует там источник информации; ч\з буфер данных поступает в аккумулятор и в один из буферов АЛУ. Второй операнд аналогично направляется последующей командой программы буфер2. Оба операнда обрабатываются АЛУ по команде одного из машинных циклов. Результат обработки направляется в аккумулятор из которого информация может быть направлена по необходимому адресу третьей командой программы В этом случае содержание аккумулятора выставляется на буфер шины данных и за тем в шину данных.
Принципы объединения микроконтроллеров в распределенные сети для управления объектами.

Основа является- ЭВМ (обычно промышленной)
Вся сеть подключается с «СОМ» порту через интерфейс RS-382 (т.к другие компьютеры не понимают), а в самой сети используется специальный интерфейс для 2-х проводной распределительной сети RS-485. Связь происходит через преобразователь причем связь 2-х сторонняя. В сети параллельно подключаются микроконтроллеры ( это МПС управления, которая выполняет функции ввода \ вывода информации (аналоговой и дискретной). Эти микроконтроллеры называются МП-ыми модулями и имеют разновидности.
-многоканальные модули дискретного ввода \ вывода;
-модули 16-ти разрядного ввода дискретного сигнала ;
-модули 16-ти разрядного вывода дискретного сигнала ;
-модули счетчики-таймеры;
-модули релейного вывода сигнала (для включения аналоговых исполнительных устройств) -модемы и радиомодемы;
Длина линии связи до 1,2 км. Преобразователь является еще усилителем. Чем более длина, тем менее быстродействие, для усилия сигнала ставится повторители и после кот можно еще тянуть ЛС на 1,2 км.В распределительную сеть можно подключить до 32-х МК, У Vк МК при инсталляции должен быть свой адрес, который не должен совпадать с другими, так как информация в сеть подается одновременно для всех МК, как и все МК одновременно выдают информацию на компьютер.Совокупность правил по которым передается информация к МПС-ам подключенным в распределительную сеть называется Протоколом интерфейса.
Много разновидностей протоколов:
Рассмотрим структуру протоколов:RS – 232;RS – 485; «CAN»
RS – 232 служит для обмена информации только в компьютере ч\з последовательный «СОМ» порт. Реализуется ч\з 25-ти или 9-ти штырьковые разъемы. СОМ – порт это физический интерфейс, т.к. Vк канал имеет свое назначение:
Структура интерфейса RS – 232
Пробелы и сначала и с конца кадра данных свидетельствуют об отсутствии информации (всегда сигнал высокого уровня чтобы защитить от помех). Переход на низкий сигнал восприятия как стартовый бит. Далее идет биты данных (всегда определенной размерности для конкретного компьютера) далее идет бит контроля четкости данных (если сумма битов данных четна, то этот разряд 0-й) это служит для контроля правильности передачи данных. Конец кадра – это стоповый бит и далее пробел.
RS-485
Предназначен только для обмена информацией по 2-х проводной линии связи. Структура данных определяется структурой команды.
По этому инт-су перед-ся команды МК-ра, которые воспринимается всеми МК-ми в сети, но исполняется команда МК-ом с указанным адресом .К RS-485 могут быть подключены различного типа МК-ры, но они будут воспринимать, только те команды на которые они рассчитаны и они не будут понимать друг друга.
ПР. для МК «Адамс» для передачи дискретной информации служит команда # 010005.
# - тип команды
адрес МК-ра.
00 – символ режима вывода данных, т.е. в том случае будет выводится байт данных выдается число 05.
Анализ вариантов автоматического регулирования нагрузки на приводе выемочных машин.
Регулировать не обходимо следующие параметры:
скорость подачи Vпод
скорость резания Vрез
4 варианта способов автоматического управления: