

2. Измерение частоты вращения. Цифровые измерительные системы 2-го рода
Цифровые измерительные системы 2-го рода (ЦИС-2). Функциональная схема, основные элементы и их назначение, способ задания интервала времени, рабочий процесс, принцип преобразования первичного счёта в численное значение угловой скорости, мера измеряемой величины. Какое устройство должно быть дополнительно введено в эту схему (по сравнению с ЦИС-1)? Условия работы с примыкающими и непримыкающими интервалами измерения (какие изменения необходимо внести в схему во втором случае?). Связь угловой скорости с числом импульсов счёта, числом кодовых меток и частотой опорного генератора; “цена” одного “кванта” скорости).
3. Индицирование ДВС. Измерение заряда по величине напряжения
Стекание заряда. Постоянная времени датчика. От чего она зависит и на что влияет? Чем определяется выбор постоянной времени (верхний и нижний пределы)? Что даёт увеличение постоянной времени? Как реально можно увеличить постоянную времени? Какими техническими средствами это достигается? Чем ограничивается максимально возможная величина постоянной времени? Требования к соединительному кабелю (3-4). Натекание заряда на датчик: к чему это приводит? Способ устранения натекания заряда на датчик. Задача №19.
№ 10
1. Электрические тормоза на базе асинхронных машин (АМ)
Электрические тормоза представляют собой электрические машины в балансирном исполнении (как правило), вал которых соединён с валом испытуемого ДВС. Механическая энергия двигателя в таких тормозах преобразуется в электрическую. Для АМ характерны конструктивная простота, невысокая стоимость, высокая эксплуатационная надёжность при минимальном обслуживании. Однако они уступают МПТ по возможности регулирования скоростного режима и пуска.
Основные элементы АМ и их назначение.
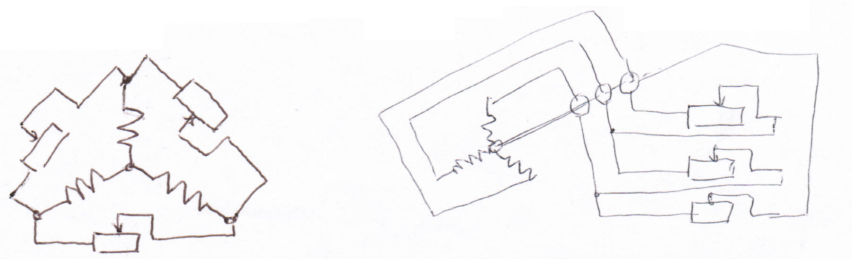
Машины переменного тока, используемые для испытаний ДВС, являются, как правило, асинхронными машинами (АМ). АМ состоят из неподвижной части – статора и подвижной – ротора. Сердечник статора – полный цилиндр из отдельных листов э/т стали толщиной 0,5 мм. Листы изолированы друг от друга. На внутренней поверхности статора в пары укладывают обмотку. Сердечник закрепляют в корпусе.
Варианты исполнения ротора АМ.
Роторы АМ выполняют 2х видов: с короткозамкнутой обмоткой и с фазной обмоткой. Первый тип называется короткозамкнутый (КЗ) АМ, второй тип – АМ с фазным ротором (ФР). Конструкция ротора КЗ АМ имеет обмотку, подобную «беличьему колесу», т.е. набор стержней, объединённых на концах кольцами (это многофазная обмотка с числом фаз, равным числу стержней).

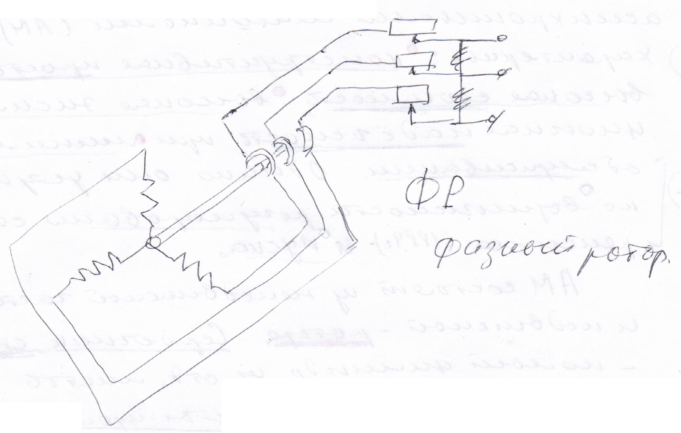
В АМ с фазным ротором в паре ротора укладывают 3х фазную обмотку, аналогично обмотке статора. Обмотку соединяют в звезду, а 3 вывода от неё подключают к контактным кольцам, расположенным на валу АД. Кольца изолированы друг от друга и от вала АД. К этим кольцам через неподвижные щётки подключают пусковой или регулировочный реостат.
Принцип работы АМ. Синхронная частота вращения и факторы, влияющие на неё.
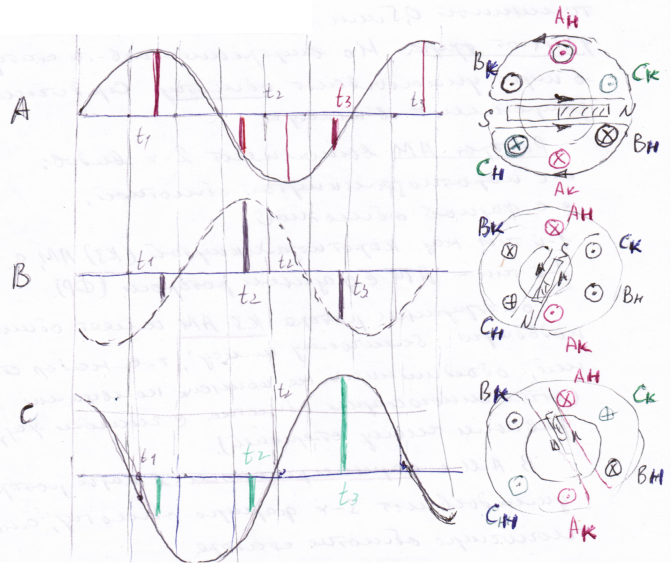
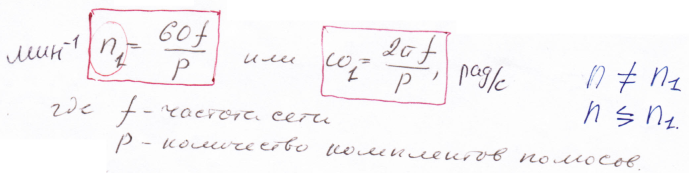
Принцип действия АМ основан на том, что при подключении 3х фазной обмотки статора к 3х фазной сети протекающие по обмотке токи создают вращающееся магнитное поле. Частота вращения этого поля n1 называется синхронной.
Магнитный поток при своём вращении пересекает проводники обмотки ротора и индуцирует в них ЭДС. Т.к. обмотка замкнута, то в ней возникает ток, активное сопротивление которого будет совпадать по направлению с ЭДС.
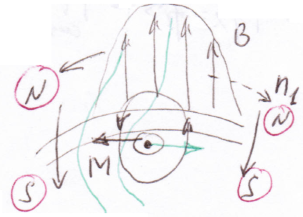
Ток, взаимодействия с магнитным полем, создаёт вращающий момент, который приводит ротор во вращение (режим АД).
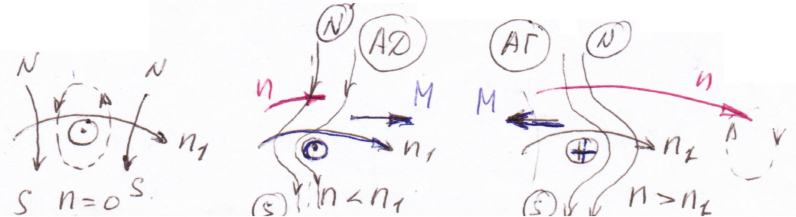
Скольжение АМ. Схема взаимодействия магнитного поля статора с током якоря при работе АМ в режиме асинхронного двигателя (АД) и асинхронного генератора (АГ). Частота ЭДС, индуцируемой в обмотке ротора.
Для АД характерно несинхронное вращение его ротора с магнитным полем.

Легко показать, что частота ЭДС, индуцируемой в обмотке ротора:
На номинальной частоте вращения АМ скольжение составляет S = 1,5…5,0%. Номинальная частота вращения зависит от n1 (частота вращения магнитного поля) и не может быть выбрана произвольно. АМ может работать в режиме электротормоза (генераторном режиме). Это возможно в том случае, если ротор будет принудительно вращаться от постоянного источника со скоростью, большей скорости магнитного поля (отрицательное скольжение ω > ω1). Итак, ω < ω1 – режим АД S > 0; ω > ω1 – режим АГ S < 0. Т.о. номинальное значение частоты вращения в режиме АД и в режиме АГ различны.
Механическая характеристика АМ (объясните закономерности её протекания). Её соответствие характеристике испытуемого ДВС.
2. Измерение частоты вращения. Цифровые измерительные системы 2-го рода
Основные погрешности ЦИС-2 при измерении средней угловой скорости: источники погрешностей (2) и их выражения. Выражение для суммарной относительной погрешности измерения средней угловой скорости (ср). Зависимость ср от средней угловой скорости (ср), числа штриховых меток (z), частоты опорного генератора (f0) и от погрешности кодовых меток (0).
3. Индицирование ДВС. Измерение сигнала пьезоэлектрических индикаторов
Основные недостатки схемы с усилителем напряжения. Схема с усилителем заряда: принципиальная схема включения пьезодатчика. Каким требованиям в этом случае должен удовлетворять усилитель? Каким должно быть его входное сопротивление? Основные уравнения, описывающие поведение этой схемы(3)? Уравнения, описывающие поведение этой схемы. Функция преобразования и постоянная времени. Каким способом в этом случае можно изменять масштаб регистрации? Основные преимущества данной схемы.
№ 11
1. Электрические тормоза на базе асинхронных машин (АМ)
Электрические тормоза представляют собой электрические машины в балансирном исполнении (как правило), вал которых соединён с валом испытуемого ДВС. Механическая энергия двигателя в таких тормозах преобразуется в электрическую. Для АМ характерны конструктивная простота, невысокая стоимость, высокая эксплуатационная надёжность при минимальном обслуживании. Однако они уступают МПТ по возможности регулирования скоростного режима и пуска.
Требования к процессу регулирования АМ.
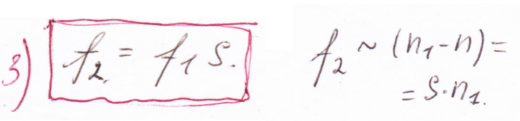
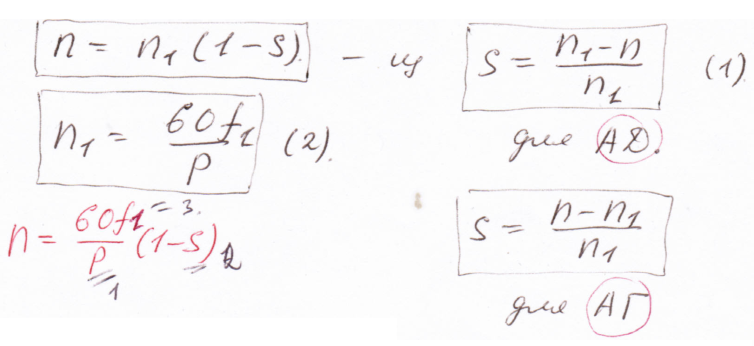
Возможные способы регулирования АМ вытекают из двух основных зависимостей
Требования к качеству регулирования рассмотрены со следующих позиций: 1. диапазон регулирования. 2. Плавность регулирования. 3. Изменение кпд в процессе регулирования.
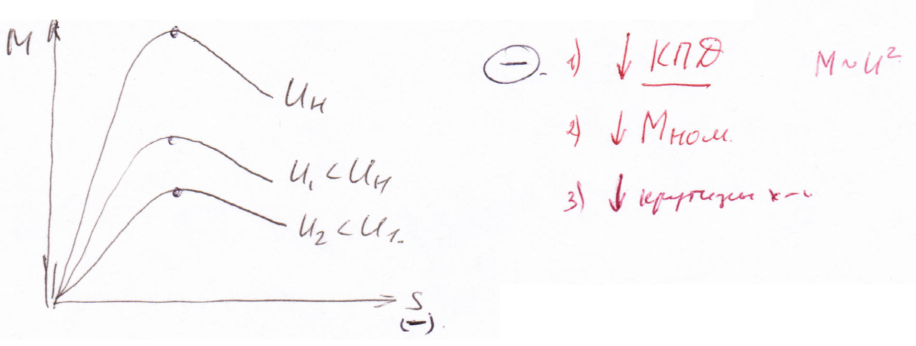
Способы регулирования АМ (3), их преимущества и недостатки. Регулирование изменением скольжения: в АМ с короткозамкнутым ротором (КЗР) и фазным ротором (ФР) с точки зрения требований к качеству регулирования.
Итак, возможное изменение частоты вращения n может быть реализовано: 1. Изменением скольжения S. В случае изменения питающего напряжения уменьшается Мк и кпд АМ.
В случае изменения сопротивления в цепи якоря в АМ с ФР в цепь ротора включаются добавочные резисторы. Это позволяет плавно регулировать частоту вращения
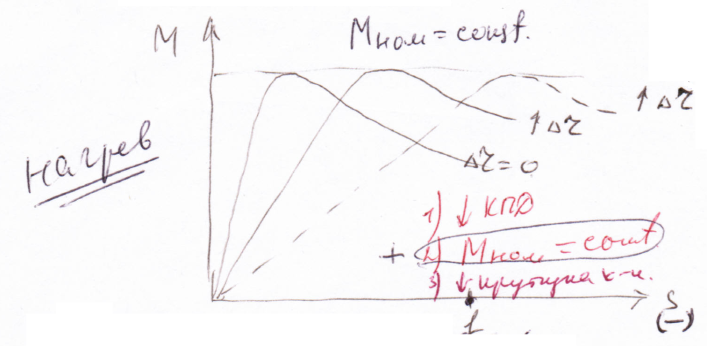
Практически этот метод используется в узком диапазоне скоростей, т.к. уменьшается кпд, сожжет быть использовано кратковременно. Но в отличие от первого случая Мmax не изменяется.
2. Изменением частоты питающего напряжения f1. Этот способ позволяет плавно менять угловую скорость в широком диапазоне. В этом случае ЭМХ АМ будет перемещаться вдоль оси абсцисс.
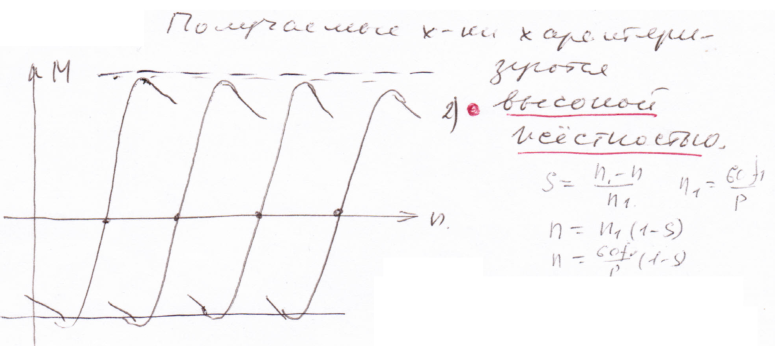
Кроме того, при частотном методе регулирования АМ регулирование скорости не сопровождается увеличенным скольжением S, поэтому потеря мощности минимальна. Для осуществления процесса регулирования с постоянным моментом, что позволяет сохранить высокий кпд и высокий коэффициент перегрузки, одновременно с частотой следует изменять и подводимое напряжение. Недостатком схемы является высокая стоимость источника питания.
3. Изменением числа пар полюсов р. Практически реализуется переключением схемы соединения обмотки статора. Это даёт возможность использовать 2, 3 или 4 скоростных режима. Но дискретность и узкий диапазон регулирования делает этот метод неудобным при испытаниях ДВС.
Система с преобразователями частоты: принципиальная схема, основные элементы, преимущества и недостатки этой схемы регулирования. Какие устройства в этом случае используются и какое влияние на питающую сеть они оказывают?
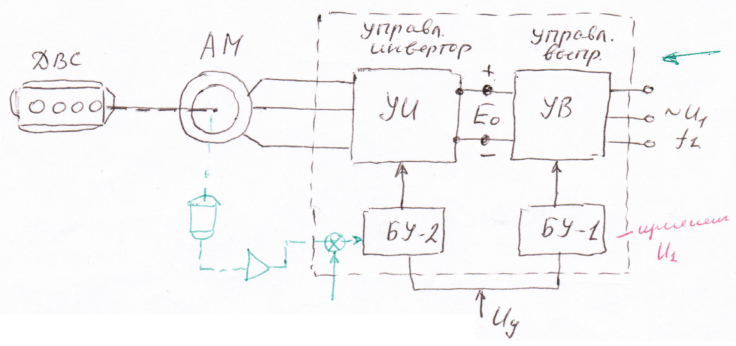
1. Управляющий выпрямитель (УВ) превращает переменное напряжение в постоянное Ео. 2. Это напряжение можно в широких пределах регулировать с помощью блока управления (БУ-1). 3. Выпрямленное и регулируемое напряжение Ео поступает на вход управляемого инвертора (УИ), который преобразует напряжение Ео в 3-х фазное напряжение регулируемой частоты с помощью БУ-2. Это напряжение подводится к АМ. Управляемые тиристоры в УИ служат ключами посредством которых сопротивление нагрузки с разной полярностью подключаются к источнику постоянного напряжения Ео. Тиристоры включаются попарно с требуемой частотой. При этом
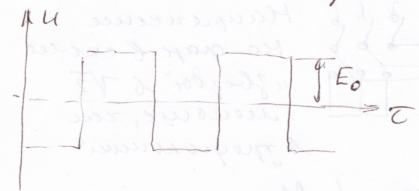
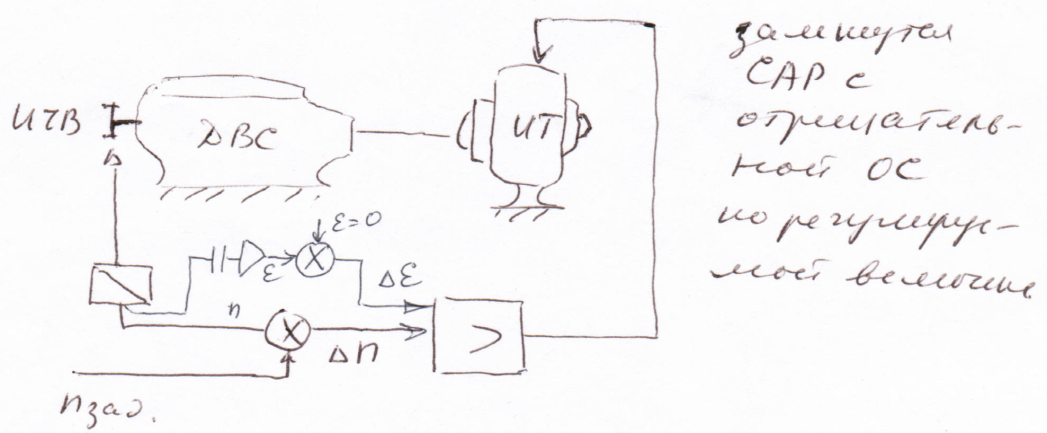
Ток, отдаваемый в сеть, также будет иметь такую искажённую форму, что снижает эффективность рекуперации (снижает качество энергии). Дальнейшее повышение точности регулирования частоты вращения АМ возможно с применением замкнутой САР с использованием сигнала обратной связи по частоте вращения.
Преимущества и недостатки АМ в качестве тормоза.
Преимущества: 1. Конструктивная простота; 2. Невысокая стоимость; 3. Высокая эксплуатационная надёжность; 4. Простота обслуживания; 5. Меньшие (по сравнению с МПТ) габариты и масса; 6. Обратимость, т.е. возможность работы в режиме электродвигателя; 7. Возможность рекуперации энергии в сеть. Недостатки: 1. Сложность широкого и плавного регулирования скоростного режима; 2. Системы статического ПЧ резко увеличивают стоимость АМ в качестве НУ ДВС; 3. В связи с этим довольно сложно использовать АМ для исследовательских испытаний.
Область применения.
Приёмно-сдаточные испытания ДВС моторно-строительных заводов и ремонтных мастерских, когда по условиям испытаний достаточно ограниченного числа скоростных режимов, и необходимость прокрутки (холодная обкатка).
2. Измерение частоты вращения. Цифровые измерительные системы 2-го рода
Суммарная погрешность ЦИС-2 при измерении мгновенной угловой скорости (при разгоне). Выражение для суммарной относительной погрешности измерения мгновенной угловой скорости (), считая, что погрешности средней скорости складываются из погрешности квантования измерительного интервала и погрешности дискретного преобразователя угла. Задача №10.
3. Индицирование ДВС. Регистрация сигналов давления
Основные задачи регистрации. Понятие дискретной регистрации: её сущность и средства дискретизации непрерывного сигнала. Цифровой осциллограф (ЦО): блок-схема, основные элементы. Аттенюатор и его назначение. АЦП: назначение, разрядность, погрешность квантования. Генератор тактов (таймер): назначение. Запоминающее устройство: его состав, запись данных в оперативное запоминающее устройство. Система синхронизации. Отображение информации.
№ 12
1. Индукторные тормоза (ИТ).
Электрические тормоза представляют собой электрические машины в балансирном исполнении (как правило), вал которых соединён с валом испытуемого ДВС. Механическая энергия двигателя в таких тормозах преобразуется в электромагнитную энергию. Индукторные тормоза относятся к тормозам с рассеиванием энергии. Они не обеспечивают рекуперацию энергии, поглощаемой при торможении ДВС, и не обладают обратимостью.
Основные элементы ИТ, их назначение и материалы.
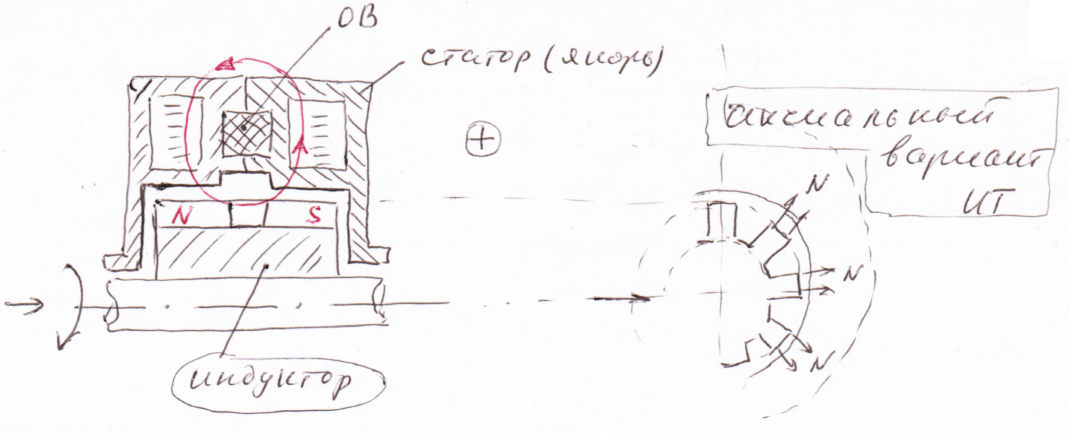
ИТ состоит из двух основных элементов: 1. неподвижной части – статора или якоря, в котором размещается обмотка возбуждения (ОВ); по последней пропускается постоянный ток. 2. вращающейся части – ротора или индуктора. Индуктор представляет собой цилиндр с крупными прямоугольными зубьями, он изготовлен из стали с высокой магнитной проницаемостью. Статор, как правило, состоит из двух симметричных частей, между которыми заключена ОВ. Статор стараются изготовлять из стали с высокой электропроводимостью.
Принцип действия ИТ.
Принцип действия ИТ основан на использовании вихревых токов, возникающих в металле при использовании в нём магнитного поля.
Преобразование энергии в ИТ.
В ИТ происходит двойное преобразование энергии: 1. подводимая к ротору механическая энергия сначала превращается в энергию электромагнитного поля (фактически в электрическую энергию). 2. затем последняя превращается в тепловую. Поэтому в большинстве случаев ИТ имеют жидкостное охлаждение. Только ИТ небольшой мощности и ИТ, работающие в течении короткого отрезка времени, (импульсном режиме) могут иметь воздушное охлаждение.
Типы ИТ по способу охлаждения. Расчёт воды, необходимой для охлаждения ИТ.
По способу охлаждения ИТ разделяют на две группы: 1. с «мокрым ротором», когда вода (обычно под напором водопроводной магистрали) поступает непосредственно в пространство между ротором и статором, охлаждая их. 2. с «сухим ротором», в которых вода циркулирует только в статоре. Это существенно уменьшает «холостые потери» в ИТ (момент при отсутствии тока возбуждения), расширяя тем самым область управления ИТ.
Количество воды, необходимое для охлаждения ИТ, определяется также, как и в ГДТ, с той лишь разницей, что в ИТ допускается большая температура воды на выходе, чем в ГДТ, т.к. возникновение кавитации маловероятно. Для расчёта используется уравнение теплового баланса Ne = Qт, определить расход (объёмный) рабочей жидкости на единицу мощности, т.е. V/Ne, если известны теплоёмкость рабочей жидкости (вода и тосол), плотность, и Δt – перепад температур на входе и выходе.
Тормозной момент ИТ: факторы, влияющие на него.
Момент
Мт,
развиваемый (поглощаемый) ИТ, зависит
от целого ряда конструктивных параметров
и от управляющих факторов: 1. от активного
диаметра D
и активной длины ротора l;
2. от переменной составляющей магнитной
индукции В; 3. от частоты вращения n;
4. от числа зубьев ротора р; 5. от магнитной
проницаемости μ и удельной электропроводимости
ρ.
 .
.
Радиальная и аксиальная компоновки ИТ.
Стремление увеличить Мт при уменьшении габаритов ИТ привело в последнее время к замене традиционной аксиальной конструкции ИТ радиальной. К недостаткам аксиального ротора относятся: трудность обеспечения радиального зазора; возможная вибрация ротора.
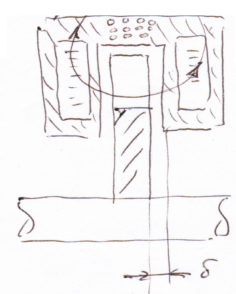
В радиальных ИТ магнитный поток замыкается через торцевые внутренние поверхности якоря (статора) и торцевые поверхности зубьев. Фактором, определяющим пульсацию магнитного потока, является осевой зазор, который может быть выполнен значительно меньшим, чем радиальный. Кроме того, осевой зазор не меняется при вибрациях ротора (в отличие от радиального). В итоге такая конструкция обладает значительно большей энергоёмкостью, чем ИТ с аксиальным ротором.
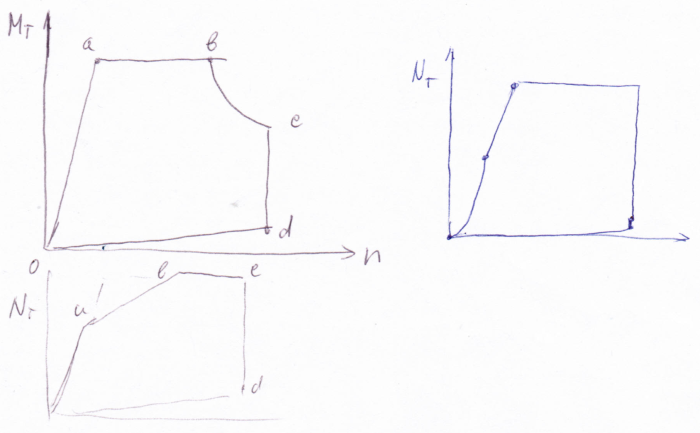
Механическая характеристика ИТ (объясните её закономерность).
ЭМХ ИТ – зависимость Мт от частоты вращения при Jв = const. ВСХ ИТ – определяет диапазон возможных режимов работы ИТ.
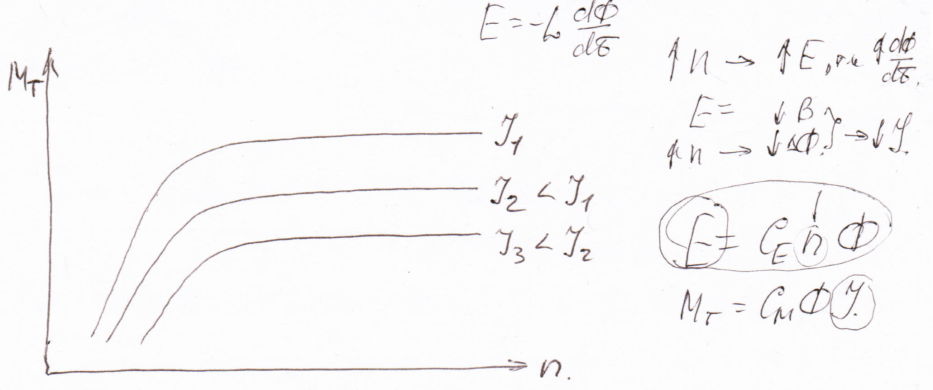
Мт ~ Jв, но с увеличением Jв темп увеличения Мт снижается. С увеличением n увеличивается частота изменения магнитного потока, что увеличивает Мт. Но при высоких n: увеличивается реакция якоря; уменьшается амплитуда переменной составляющей потока. Поэтому зависимость Мт(n) принимает вид горизонтальной прямой.
Её соответствие характеристике ДВС.
С точки зрения сопряжения с ДВС естественная ЭМХ ИТ неблагоприятна. Во всех случаях требуется автоматическое управление ИТ, что не сложно осуществить, учитывая небольшую мощность управления. С другой стороны, способность поглощать высокий крутящий момент при низких частотах вращения позволяет в принципе значительно расширить диапазон регулирования ИТ. Регулирование ИТ осуществляется только одним путём – изменением тока возбуждения. Мощность возбуждения составляет 0,1…0,3% от поглощаемой мощности.
Внешняя характеристика ИТ с учётом ограничений.
ВСХ ИТ показывает поле возможных режимов работы ИТ.
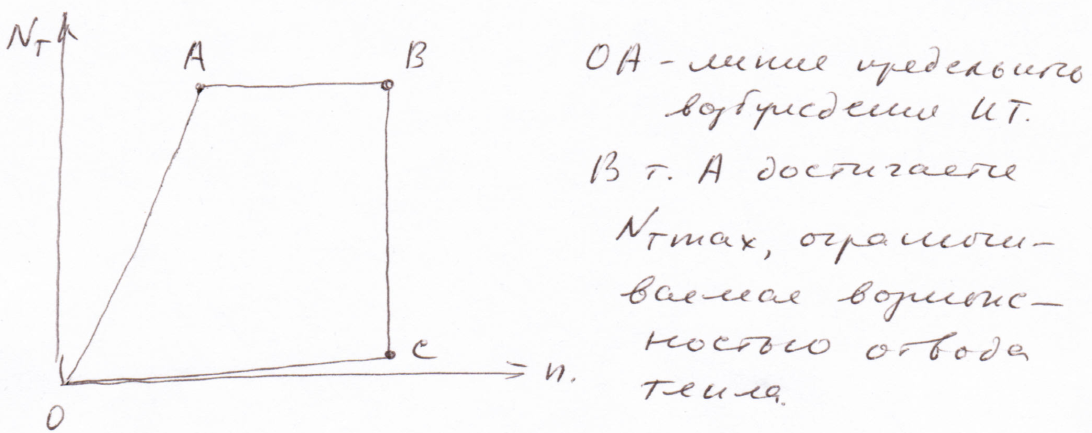
Линия ВС – ограничивает максимальною частоту вращения по величине сил инерции. Линия ОС – «холостые» потери в ИТ (без возбуждения).
Преимущества и недостатки ИТ в качестве тормоза. Способы преодоления основных недостатков ИТ.
Преимущества: 1. Способность поглощать высокий Мт при низких и высоких частотах вращения предопределяют широкий диапазон регулирования ИТ. 2. Обладает высокой энергоёмкостью. 3. Более низкая стоимость изготовления и эксплуатации. 4. Более высокая надёжность, т.к. отсутствуют обмотки в роторе. Более высокая частота вращения, чем в ЭМ. 5. Простота управления ИТ и простота его автоматизации. 6. Малая механическая инерционность. 7. Малое рабочее напряжение ИТ. Недостатки: 1. Отсутствие режима прокрутки ДВС. Эта задача решается сочетанием ИТ с малой МПТ.
2. Неблагоприятная форма ЭМХ, что требует в общем случае САУ стабилизационного режима.
3. Отсутствие рекуперации энергии. Этот недостаток пока не устранён. 4. Высокие требования к качеству воды и её очистке. 5. Необходимость обязательной установки системы аварийной автоматизации от перегрева, а также защита ИТ от высокой частоты вращения.
Область применения.
ИТ имеют в настоящее время очень широкий диапазон применения от исследовательских испытаний до доводочных и отладочных. Использование их при приёмо-сдаточных испытаниях нежелательно из-за отсутствия режима «холодной» обкатки и рекуперации энергии. ИТ очень удобны для автоматизации испытаний и для создания специальных САУ, предназначенных для испытаний ДВС на НУР.
2. Измерение частоты вращения. Интегрирующий тахометр с аналоговым выходом
Принцип измерения. Чем создаётся частотная модуляция? Типы бесконтактных преобразователей; объясните принципы их действия. Принципиальные преимущества такого способа измерения. Приведите измерительную схему тахометра с аналоговым выходом. Перечислите основные элементы измерительной схемы. Укажите их назначение. Докажите, что среднее значение выходного аналогового сигнала прямо пропорционально частоте вращения. Какие динамические погрешности возникают в таком типе тахометров? Как их определить, учесть или рассчитать? Задача №8.
3. Индицирование ДВС. Регистрация сигналов давления
Основные задачи регистрации. Недостатки непрерывной регистрации. Понятие дискретной регистрации: её сущность и средства дискретизации непрерывного сигнала. Цифровой осциллограф (ЦО): блок-схема, основные элементы. Аттенюатор и его назначение. АЦП: назначение, разрядность, погрешность квантования. Генератор тактов (таймер): назначение. Запоминающее устройство: его состав, запись данных в оперативное запоминающее устройство. Система синхронизации. Отображение информации. Задача №22.
№ 13
1. см. бил. №2
2. Измерение расхода топлива. Кориолисовы расходомеры.
Принцип действия. Ускорение Кориолиса и сила Кориолиса. Какой расход измеряет данный тип расходомера? Основные недостатки классической схемы. Кориолисовы вибрационные расходомеры: классическая схема и возникающие проблемы. Вариант вибрационного кориолисова расходомера с U-образной трубкой: схема, основные элементы и геометрические параметры, выражение для силы Кориолиса. Принцип работы, мера расхода, способ измерения.
3. Индицирование ДВС. Требования к динамическим характеристикам датчиков
Условие соответствия динамических характеристик датчика требованиям динамичности исследуемого процесса (амплитудно- и фазочастотные характеристики датчиков и их сравнение с характеристиками исследуемого процесса). В чём заключается получение требований для оценки динамичности исследуемого процесса? Газодинамическая инерционность датчика: её составляющие (3). Факторы, влияющие на отдельные её составляющие газодинамической инерционности. Способы её уменьшения. Задача №16.
№ 14
1. см. бил. №3
2. Измерение расхода топлива. Объёмный метод
Элементарный объёмный метод: основные элементы, принцип работы, вычисление расхода. Требования к объёму мерных ёмкостей. Требуемая точность по ГОСТ 14846-81. Автоматизация объёмного метода: структурная блок-схема; способ регистрации моментов начала и конца процесса измерения. Диаграмма изменения сигнала, управляющего началом или концом счёта времени. Объёмный метод без мерных колб: требования к материалу и форме мерной ёмкости; физический эффект, используемый для фиксации уровня топлива в начале и конце счёта. Точность автоматизированных объёмных методов. Недостатки объёмного метода.
3. Индицирование ДВС. Регистрация сигналов давления
Блок-схема дискретной регистрации сигналов давления. Выбор угла дискретизации. Чем определяется выбор частоты дискретизации или угла дискретизации? Время регистрации и его связь с частотой дискретизации. Как определить целесообразный угол дискретизации для четырёхтактного цикла, если известны частота вращения и время преобразования АЦП? Как определить частоту опроса АЦП для четырёхтактного цикла, если известны частота вращения (например, 6000 мин1) и угол дискретизации? Задача №20.
№ 15
1. см. бил. №4
2. Измерение массового расхода топлива
Система автоматизированного измерения массового расхода топлива (САИРТ). Задачи автоматизации. Что задаётся и что является мерой расхода? Схема с использованием рычажных весов: основные элементы, принцип работы, основные особенности, диаграмма работы на разных режимах (4-5). Точность результатов. Погрешности САИТР: в том числе: “сифонная ” погрешность и способы её уменьшения; влияние температуры; влияние реактивной силы струи при заборе топлива из мерной ёмкости и при обратном возврате (способы устранения). Обеспечение идентичности условий регистрации начала и конца измерения. Задача №12.
3. Индицирование ДВС. Пьезоматериалы
Что такое пьезоэлектрики? Кристалл кварца и его оси. Физическая природа пьезоэффекта. Продольный и поперечный пьезоэффект. От каких факторов зависит выходной сигнал продольного и поперечного пьезоэффектов? Как должны быть ориентированы грани пластин, вырезаемых из кристалла кварца? В чём преимущества кварца в качестве пьезоматериала (4-6)? Что относится к влияющим факторам пьезоматериалов? В каком диапазоне температур пьезокварц может применяться без охлаждения?
№ 16
1. см. бил. №5
2. Измерение массового расхода топлива. Расходомер АРТ-2М
Основные элементы, их назначение, принцип работы. Что задаётся и что является мерой расхода? Что происходит при включении кнопки «Замер»? Что управляет доливом топлива, а также началом и концом измерения? Начало и конец измерения: что происходит в эти моменты? Временная диаграмма работы расходомера. Основная погрешность. Минимально допустимое время измерения и максимальный расход топлива. Определить значение времени измерения на режиме минимальной частоты вращения холостого хода, если расход топлива составляет 2 кг/ч.
3. Индицирование ДВС. Конструкция пьезокварцевого датчика
Элементарная схема и основные элементы. Нарушение линейности характеристики датчика и способ её устранения. Как это реализуется в современных датчиках? Температурная чувствительность датчика: причины её появления. Каким образом температурная чувствительность отражается на результатах измерения давления в цилиндре в различных частях рабочего цикла? На результатах измерения каких показателей это отражается? Какими конструктивными мероприятиями устраняется или существенно уменьшается влияние температуры в современных пьезокварцевых датчиках?
№ 17
1. см. бил. №6
2. Измерение расхода топлива
Тахометрические расходомеры и расходомеры с вращающимся шариком: основные элементы, принцип действия, мера расхода, метрологические свойства (основные достоинства (4-5)) и недостатки (2). Расходомеры с овальными шестернями (роторами): основные элементы, принцип действия, мера расхода, метрологические свойства, основной недостаток, способ повышения разрешающей способности и способ компенсации основного недостатка. Задача №11.
3. Индицирование ДВС. Градуировка пьезоэлектрических индикаторов
В каких случаях возможна статическая градуировка пьезодатчиков? В чём её недостатки? Каким образом осуществляется градуировка датчика непосредственно на двигателе? Какой датчик используется для этой цели? Способы нанесения нулевой линии индикаторной диаграммы (2). В каких случаях необходима динамическая градуировка пьезодатчиков? Как она проводится? Что ещё определяется по этой градуировке? Как определяется собственная частота индикаторов?
№ 18
1. см.бил. №7
2. Измерение массового расхода топлива. Расходомер фирмы AVL
Принципиальная схема, основные элементы и принцип работы. Принцип измерения: что задаётся и что является мерой расхода? Чем (каким датчиком) измеряется мера? В чём его преимущества и недостатки? Какие функции выполняет цепь управления? Режимы работы расходомера. Диаграмма работы. Основная погрешность. Может ли данная схема использоваться для непрерывного измерения расхода? Чем определяются динамические свойства данного расходомера?
3. Индицирование ДВС. Измерение заряда по величине напряжения
Ёмкость датчика. Вычисление величины заряда и вычисление величины напряжения. Чувствительность датчика по напряжению. Соединительный кабель и его влияние на величину выходного напряжения. Требования к соединительному кабелю (3-4). Измерительная цепь включения пьезодатчика. Её влияние на величину выходного сигнала. Задача №18.
№ 19
1. см. бил. №8
2. Измерение массового расхода топлива. Гидравлический мост
Схема, основные элементы, принцип работы. Что является мерой расхода? Какой преобразователь используется для измерения? Докажите, что данная мера прямо пропорциональна массовому расходу топлива для условия, когда циркуляционный объёмный расход меньше измеряемого объёмного расхода. Метрологические свойства. Источники погрешностей. Задача №14.
3. Индицирование ДВС. Регистрация сигналов давления
Техническая реализация дискретизации угла поворота коленчатого вала (на примере фотоэлектрического преобразователя фирмы Цейс или преобразователя типа ВЕ). Элементы схемы, их назначение, способ регистрации, диаграмма работы, принцип уменьшения шага дискретизации. Выбор угла дискретизации. Чем определяется выбор частоты дискретизации или угла дискретизации? Время регистрации и его связь с частотой дискретизации. Задача № 21.
№ 20
1. см. бил. №9
2. Измерение массового расхода топлива. Гравиметрические расходомеры
Основное преимущество. Основные элементы. Принцип работы. Что задаётся и что измеряется? Что является (или может являться) мерой расхода? Чем измеряется мера? Чем определяется начало измерения? Чем определяется (или может определяться) конец измерения? Режимы работы расходомера (3). Функции цепи управления в разных режимах. Диаграмма работы. Метрологические свойства. Оценка погрешности (выражение для суммарной относительной погрешности). Основные недостатки.
Задача №13.
3. Индицирование ДВС. Измерение заряда по величине напряжения
Стекание заряда. Постоянная времени датчика. От чего она зависит и на что влияет? Чем определяется выбор постоянной времени (верхний и нижний пределы)? Что даёт увеличение постоянной времени? Как реально можно увеличить постоянную времени? Какими техническими средствами это достигается? Чем ограничивается максимально возможная величина постоянной времени? Требования к соединительному кабелю (3-4). Натекание заряда на датчик: к чему это приводит? Способ устранения натекания заряда на датчик. Задача №19.