

2. Измерение крутящего момента
Требования к точности измерения крутящего момента в зависимости от поставленной задачи. Точность по ГОСТ 14846-81. Средства измерения (СИ) с упругими силоизмерителями реактивного момента с электрическими выходными сигналами. Область применения. Тензометрические преобразователи с балочными упругими элементами. Типы упругих элементов? Мостовая схема включения: назначение. Динамические свойства СИ с упругими преобразователями. Частота собственных колебаний силоизмерительной системы. В каких случаях такие СИ могут быть использованы для измерения переменного Мк? Что необходимо учитывать при использовании данного СИ при измерении крутящего момента в процессе разгона двигателя? Задача № 7.
3. Индицирование двс. Основные сведения
Блок-схема индицирования (для одноцикловых индикаторов): основные элементы и их назначение (общий случай). Условие соответствия динамических характеристик датчика требованиям динамичности исследуемого процесса. В чём заключается получение требований для оценки динамичности исследуемого процесса? Как соотносятся частотный спектр исследуемой закономерности с частотой собственных колебаний механической системы датчика? От чего (каких конструктивных особенностей) зависит частота собственных колебаний механической системы датчика? Как экспериментально определяется частота собственных колебаний датчиков?
Задача №15.
№ 2
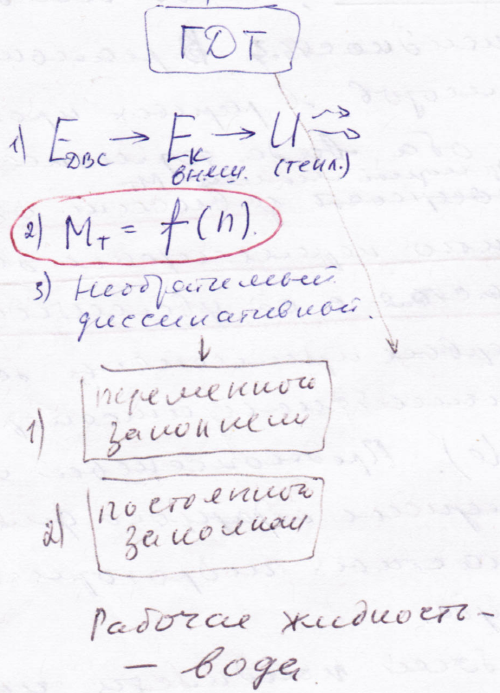
1. Гидродинамические тормоза (гдт).
Основные требования, предъявляемые к тормозам и требования, предъявляемые к ним в связи с автоматизацией испытаний. Параметры, характеризующие тормоз в качестве нагружающего устройства.
Поглощение механической мощности в ГДТ.
ГДТ – тормоза, в которых поглощение мощности происходит в результате гидродинамической работы, затрачиваемой на перемещение жидкости, либо вследствие трения ротора о жидкость.
Составляющие тормозного момента (Мт) ГДТ.(2).
Разгон жидкости колесом ГДТ происходит по 2м причинам: в результате воздействия лопаток РК и лопаток статора на рабочую жидкость; в результате увлечения силами трения жидкости, омывающей ротор. Поглощаемый тормозной момент Мт зависит от скорости взаимного перемещения деталей ротора, возрастая с её увеличением.
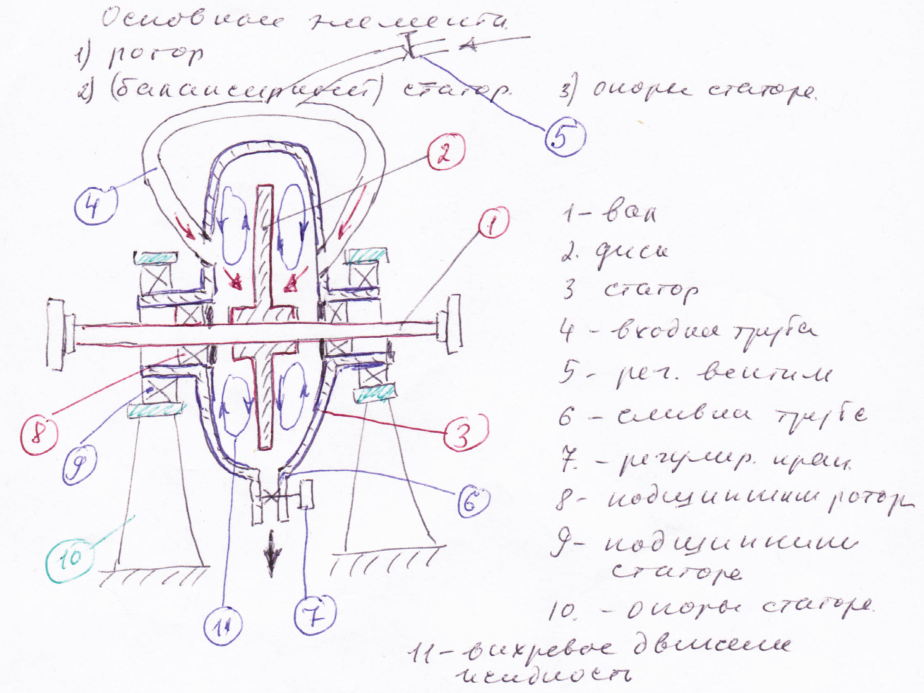
Рабочий процесс ГДТ.
Действие ГДТ основано на сопротивлении жидкости перемещению, вращающемуся в ней ротора. При вращении ротора жидкость, заполняющая полость ГДТ начинает двигаться от центра (подвод жидкости осуществляется к центру) к периферии под действием центробежных сил. Увлекаясь во вращение рабочим колесом ГДТ, жидкость совершает движение вдоль межлопаточных каналов (если на рабочем колесе имеются лопатки); одновременно она вращается относительно оси ГДТ.
Превращение энергии в ГДТ.
В ГДТ механическая энергия ДВС преобразуется в кинетическую энергию жидкости, которая в конечном счёте превращается в тепло в результате трения и гидродинамических потерь. ГДТ относят к тормозам диссипативного типа: рассеиваемая ими мощность уносится водой или рассеивается воздухом и полезно не может быть использована.
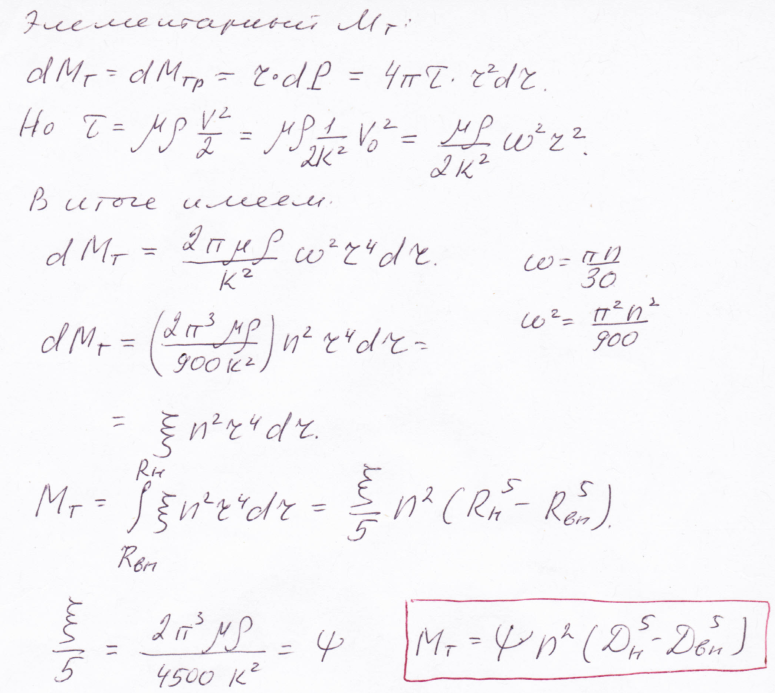
Места подвода и отвода рабочей жидкости в дисковых ГДТ. Момент трения на примере дискового ГДТ с гладким ротором (вывод формулы). Коэффициент энергоёмкости.
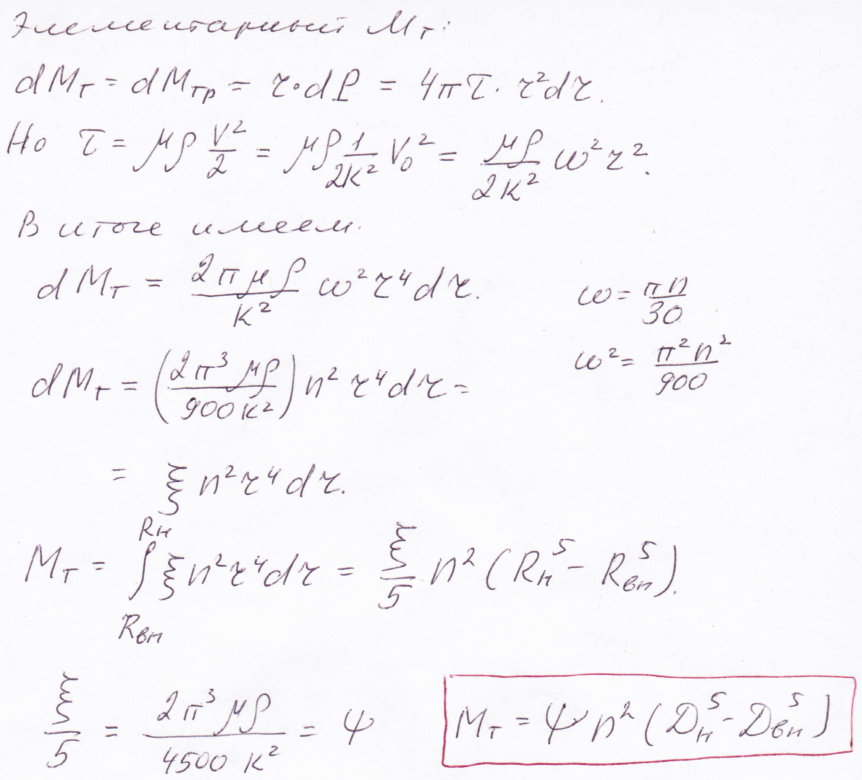

[К] кВт/(мин-3м5).
Повышение энергоёмкости дисковых ГДТ.
Увеличения энергоёмкости можно добиться изменением формы диска ГДТ. Необходимо увеличивать турбулентность движения жидкости, увеличивать трение жидкости, и увеличивать гидродинамическую работу.
В ГДТ с гладким ротором К = 0,15…0,20 кВт/(мин-3м5).

В ГДТ с перфорированным ротором (сотовые ГДТ) К = 1,5…1,8 кВт/(мин-3м5).
В штифтовых ГДТ К = 4,5…10 кВт/(мин-3м5).
Преимущества и недостатки ГДТ с гладким ротором. Область применения.

Преимущества: 1. n = 500…60000 мин-1; 2. простота конструкции; 3. минимальная склонность к кавитации. Недостатки: 1. низкий коэффициент энергоёмкости k = 0,15…0,20 кВт/(мин-3м5). Область применения: ТК, Турбины.
Задача №1.
2. Измерение крутящего момента (Мк). Динамометрические муфты
Область применения. Типы динамометрических муфт в зависимости от основных физических величин, изменяющихся при закручивании вала (2). Как разделяются торсионные динамометры в зависимости от способа измерения угла закручивания вала (4)? Требования к динамометрическим муфтам. Что необходимо учитывать при использовании динамометрических муфт при измерении крутящего момента в процессе разгона двигателя (покажите, как это реализовать практически)?
3. Индицирование ДВС. Требования к динамическим характеристикам датчиков
Условие соответствия динамических характеристик датчика требованиям динамичности исследуемого процесса (амплитудно- и фазочастотные характеристики датчиков и их сравнение с характеристиками исследуемого процесса). В чём заключается получение требований для оценки динамичности исследуемого процесса? Газодинамическая инерционность датчика: её составляющие (3). Факторы, влияющие на отдельные её составляющие газодинамической инерционности. Способы её уменьшения. Задача №16.
№ 3
1. Гидродинамические тормоза (ГДТ). Лопастные и камерные ГДТ
ГДТ – тормоза, в которых поглощение мощности происходит в результате гидродинамической работы, затрачиваемой на перемещение жидкости. В ГДТ механическая энергия ДВС преобразуется в кинетическую энергию жидкости, которая в конечном счёте превращается в тепло в результате трения и гидродинамических потерь.
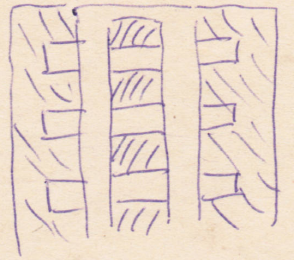
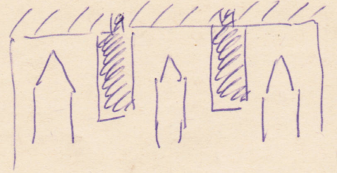
Лопастные ГДТ. Создание гидродинамической работы.
К
внутренней поверхности статора
прикрепляются несколько радиально
расположенных лопастей. Аналогичные
лопасти сделаны и на роторе. Наиболее
технологически простыми являются
плоские лопатки.
 .
.
Благодаря этому все лопатки не могут одновременно устанавливаться друг против друга (может только одна пара лопаток). Это обеспечивает уменьшение пульсаций. Такая конструкция позволяет увеличить гидродинамическую работу.
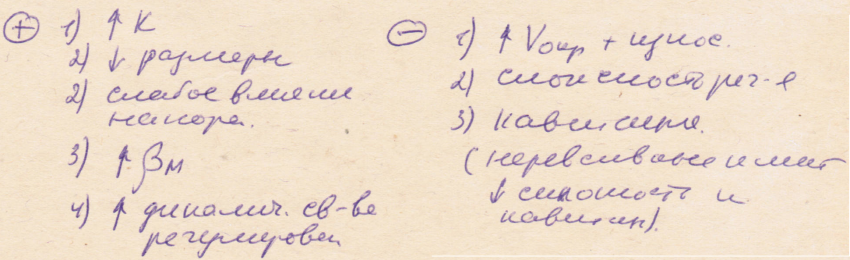
Преимущества: высокий K; небольшие габариты; слабое влияние насоре. Недостатки: низкий βN; высокая склонность к кавитации; низкая α (скоростного диапазона); низкая Vокр.
Момент циркуляции (Мц).
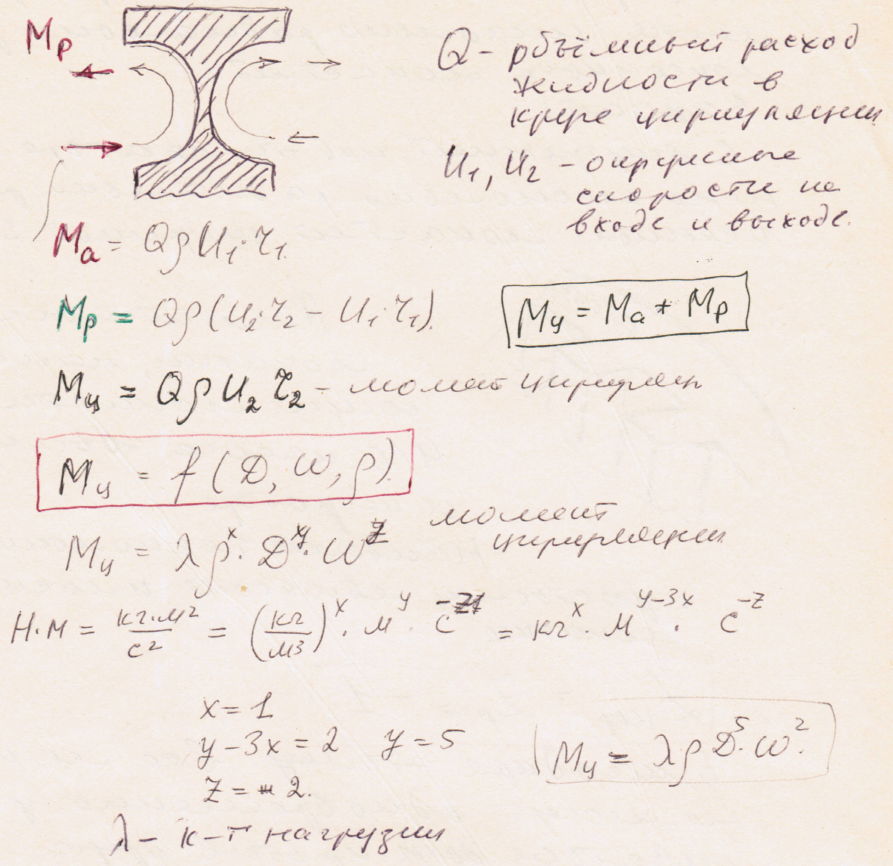
Вывод выражения для МТ исходя из метода размерностей.
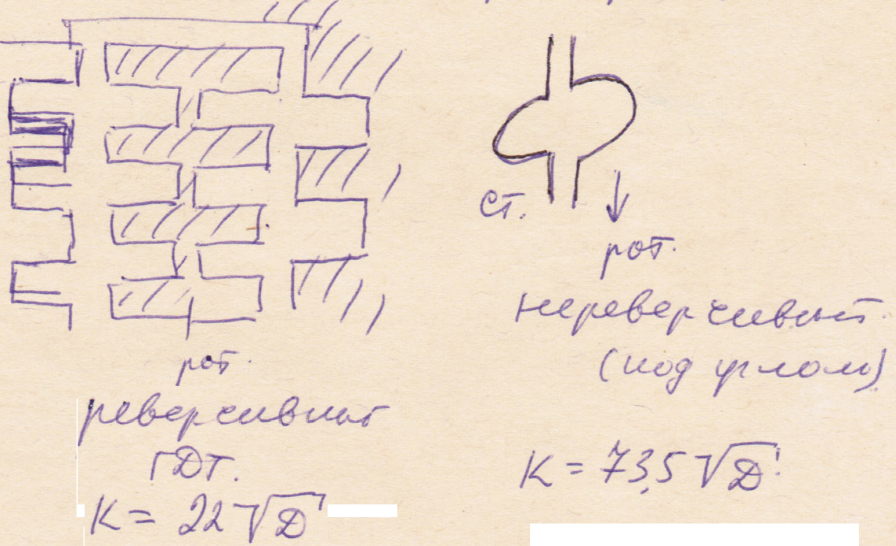
Снижение неравномерности тормозного момента в этих ГДТ. Места подвода и отвода рабочей жидкости в камерных ГДТ; преимущества и недостатки. Реверсивные и нереверсивные ГДТ.
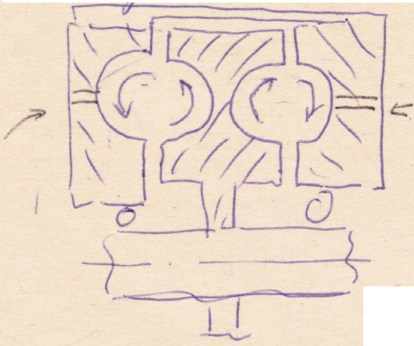
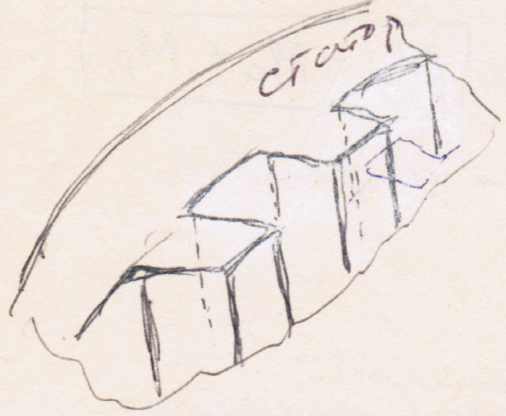
В статоре и роторе выполнены карманы полуэллиптического сечения. Жидкость преобретает энергию в роторе, а отдаёт в статоре. Для уменьшения пульсаций число ячеек в статоре на 1..2 меньше числа ячеек ротора Zст = Zрот – (1…2). Вода подаётся внутрь ячеек , а затем при вращении захватывается ими и подаётся к периферии , далее в неподвижные ячейки. При этом вода непрерывно перерезается кромками лопастей.
Камерные ГДТ с “разрезным” ротором, их преимущества.
В таких ГДТ периферийная часть ротора «отделена» от его части, связанной со ступицей, и применяется в виде стационарной (неподвижной) направляющей к статору. Это позволяет увеличить частоту вращения n и измеряемую мощность N при достаточно низкой скорости воды.
Ограничение диаметра ротора ГДТ.
Уменьшение диаметра ГДТ приводит к проблеме отвода теплоты. Увеличение диаметра ротора ГДТ приводит к увеличению окружной скорости Vокр и к уменьшению давления, т.е. к увеличению кавитации.
Ограничения энергоёмкости ГДТ (причины).
Задача №2.
2. Измерение крутящего момента (Мк). Динамометрические муфты
Тензодинамометры: принцип действия, мера (измеряемая величина, формула), размещение тензорезисторов на валу, схема включения. Влияющие факторы. Какие геометрические размеры мерного участка вала влияют на чувствительность тензодинамометров? Преимущества и недостатки. Индуктивные динамометры: принцип действия, мера (измеряемая величина, формула), размещение индуктивных преобразователей на валу, схема включения. Влияющие факторы. Каким образом и какие геометрические размеры мерного участка вала влияют на чувствительность индуктивных динамометров? Преимущества и недостатки.
3. Индицирование ДВС. Регистрация сигналов давления
Блок-схема дискретной регистрации сигналов давления. Выбор угла дискретизации. Чем определяется выбор частоты дискретизации или угла дискретизации? Время регистрации и его связь с частотой дискретизации. Как определить целесообразный угол дискретизации для четырёхтактного цикла, если известны частота вращения и время преобразования АЦП? Как определить частоту опроса АЦП для четырёхтактного цикла, если известны частота вращения (например, 6000 мин1) и угол дискретизации? Задача №20.
№ 4
1. Гидродинамические тормоза (ГДТ). Регулирование ГДТ.
ГДТ – тормоза, в которых поглощение мощности происходит в результате гидродинамической работы, затрачиваемой на перемещение жидкости. В ГДТ механическая энергия ДВС преобразуется в кинетическую энергию жидкости, которая в конечном счёте превращается в тепло в результате трения и гидродинамических потерь.
Внешняя скоростная характеристика ГДТ.
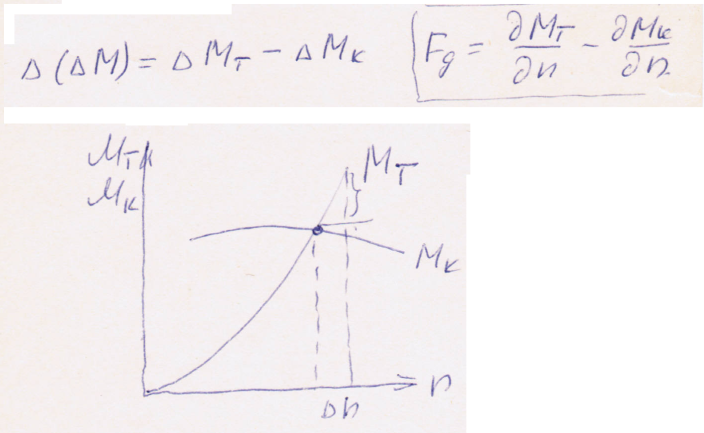
ГДТ имеют жесткую ВСХ: при небольшом отклонении n MT значительно изменяется (по закону квадратичной параболы), что приводит к сильному дисбалансу моментов ДВС и ГДТ. Т.о. система ДВС–ГДТ обладает значительным самовыравниванием и работает очень устойчиво, теоретически не требуя специальных средств управления.
Однако ГДТ работает в широком диапазоне скоростных и нагрузочных режимов. Возникает необходимость изменять энергоёмкость ГДТ в соответствии с изменением мощности ДВС. И в этом случае свойство самовыравнивания может оказаться недостаточным. Регулированием ГДТ называется изменение его энергоёмкости в соответствии с изменением мощности испытуемого ДВС.
Требования к процессу регулирования.
1. Обеспечение необходимого диапазона регулирования. Это выражается в плавном изменении поглощаемой мощности при данной частоте вращения при сохранении устойчивости режима и его стабильности. 2. Высокие динамические свойства регулирования, т.е. минимальное время отклика (в виде изменения мощности) по отношению к моменту перемещения органа управления.
Способы регулирования ГДТ.
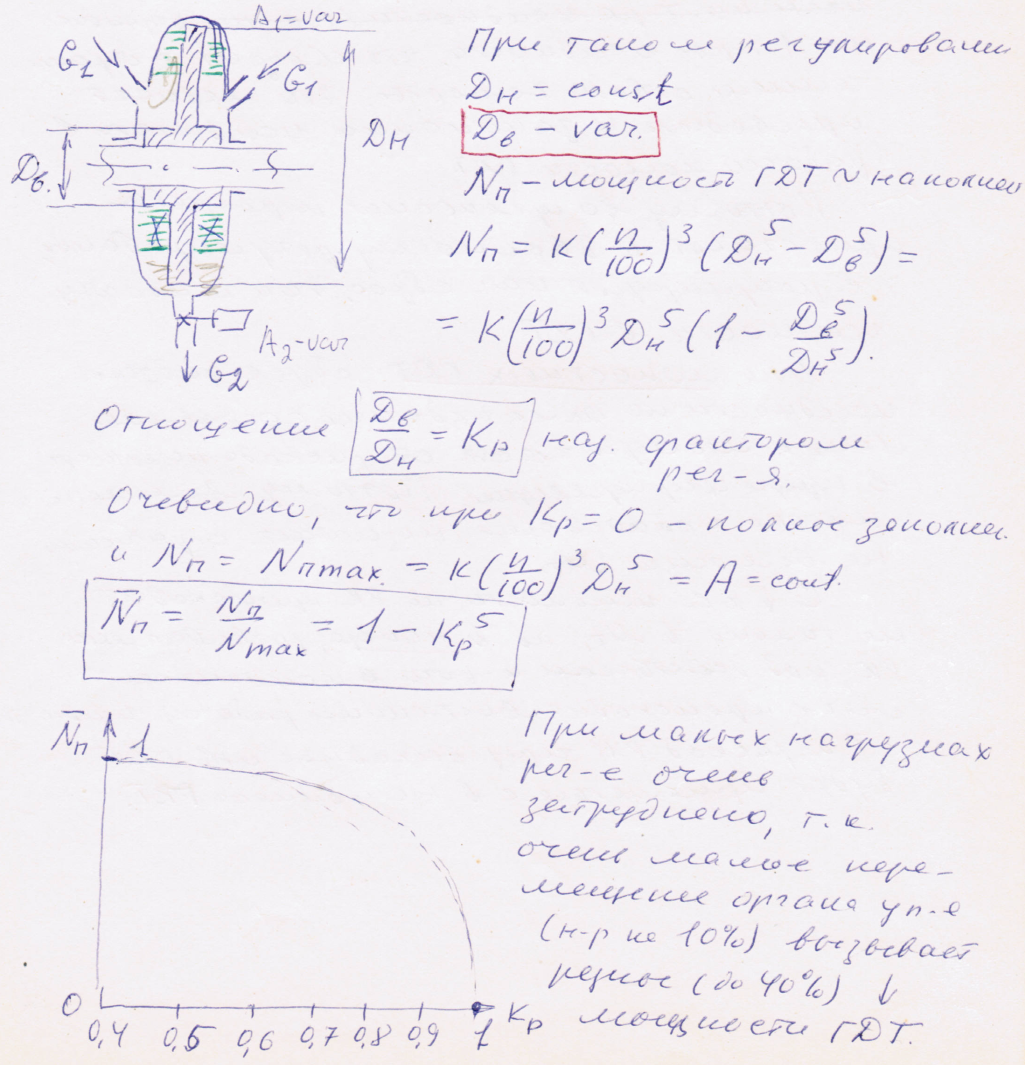
1. Изменение заполнения рабочей полости жидкостью. 2. Изменение формы проточной части ГДТ. Иногда используется смешанное регулирование. Способ регулирования существенно влияет на зависимость поглощаемой мощности ГДТ от перемещения органа управления. От него также завися и динамические свойства ГДТ. ГДТ, в которых используется 1й способ, называется ГДТ переменного наполнения. ГДТ, в котором используется 2й способ, называется ГДТ постоянного наполнения или ГДТ с шиберным регулированием.
Регулирование дисковых и камерных (особенности) ГДТ переменного заполнения и шиберных ГДТ постоянного заполнения.
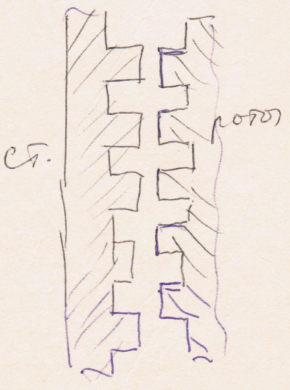
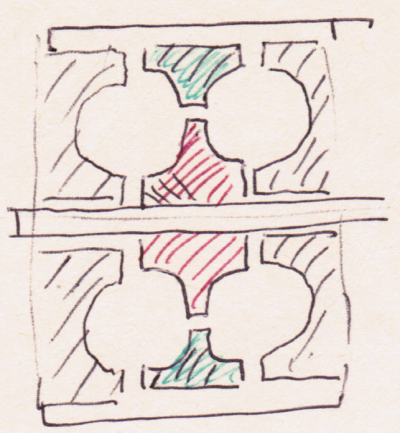
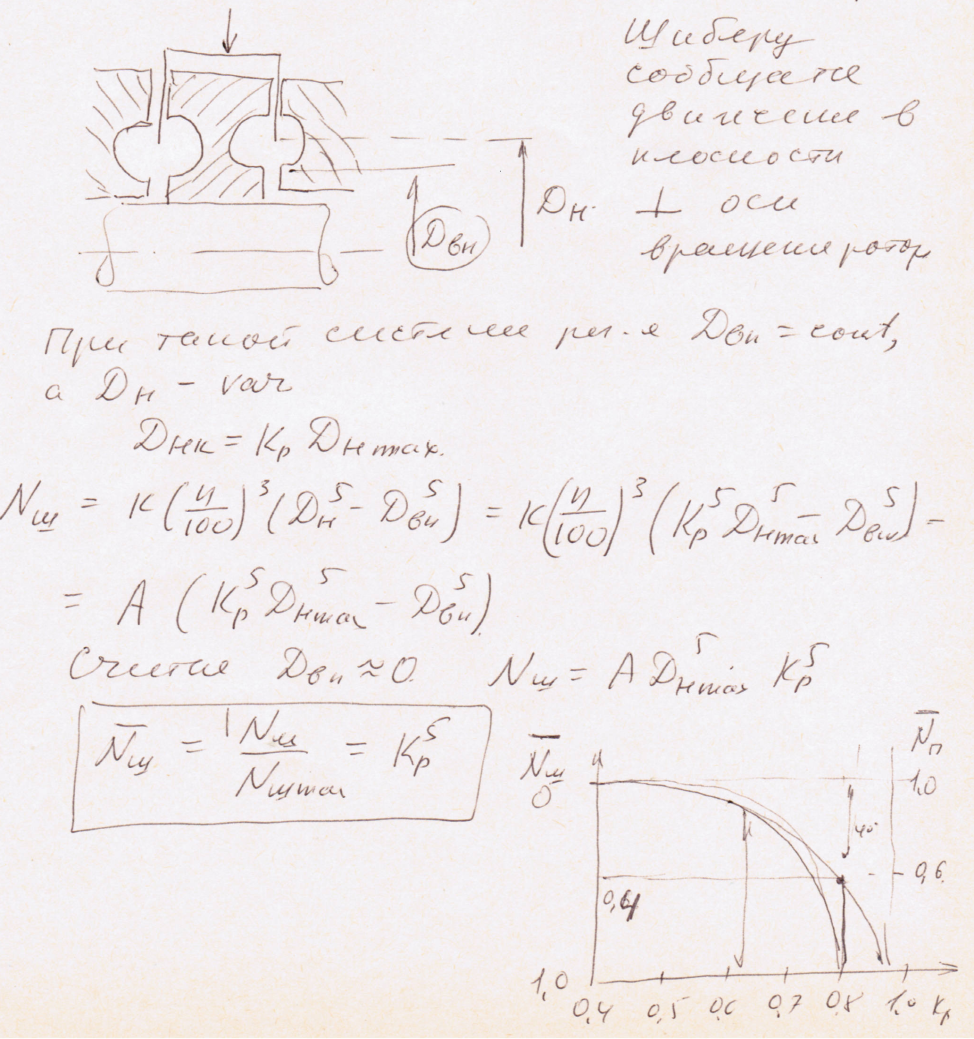
В дисковых ГДТ регулирование практически сводится к изменению толщины водяного кольца, формирующегося в статоре при вращении ротора. В ГДТ камерного типа регулирование достигается увеличением оттока воды из рабочих камер, что уменьшает массу воды, циркулирующей в них. Т.к. объём рабочих камер мал, то время перехода с одного режима на другой – значительно меньше. Для шиберных ГДТ характерно полное заполнение на всех рабочих режимах. Изменение активной поверхности ротора изменяют с помощью заслонок-шиберов, которыми посредством винтового механизма вводится в зазоры между рабочими поверхностями статора и ротора. Шиберы преграждают выход рабочей жидкости из рабочих колёс на статор.
Приближённый вывод зависимости поглощаемой мощности от фактора регулирования; Подвод и отвод рабочей жидкости? Диаграммы изменения во времени проходных сечений, расходов жидкости, количества циркулирующей жидкости и поглощаемой мощности.
На примере ГДТ с гладким ротором (диском).
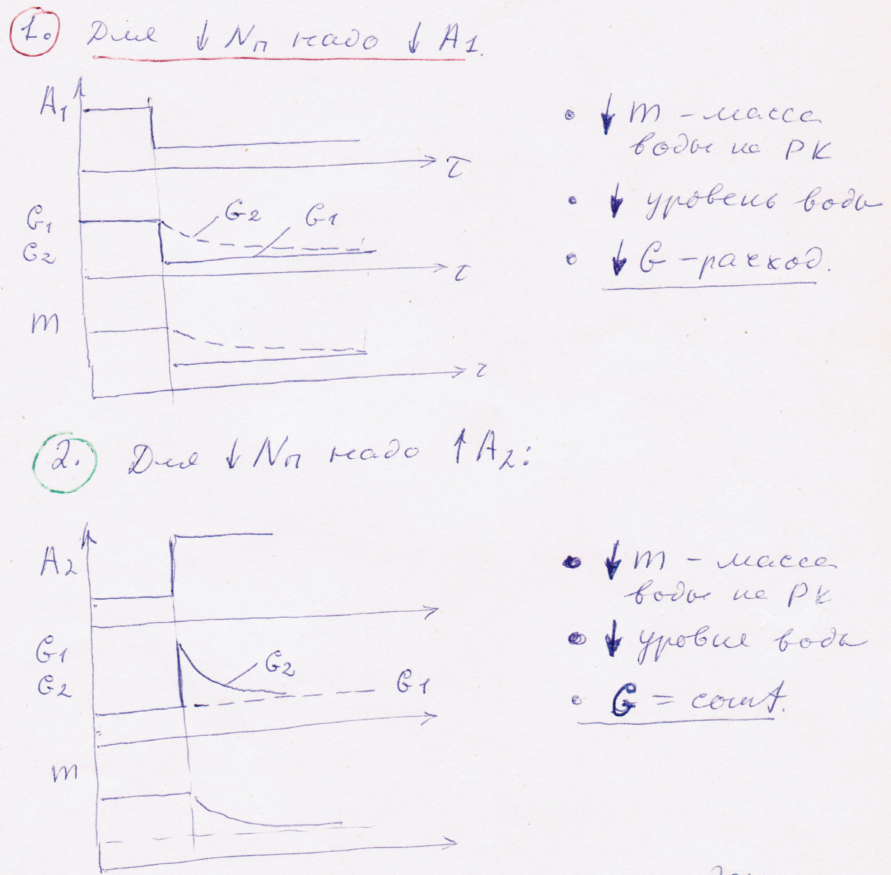
На примере шиберного ГДТ.
Особенности регулирования камерных ГДТ переменного заполнения. Преимущества камерных ГДТ по сравнению дисковыми ГДТ при таком способе регулирования. Расширение диапазона регулирования.
В ГДТ камерного типа регулирование достигается увеличением оттока воды из рабочих камер, что уменьшает массу воды, циркулирующей в них. Т.к. объём рабочих камер мал, то время перехода с одного режима на другой – значительно меньше. Для расширения диапазона таких ГДТ их выполняют сдвоенными. Подвод воды в них осуществляется в центре камеры в зоне минимальных давлений. В силу малого объёма рабочих камер такой процесс регулирования обладает высокими динамическими свойствами.
В ГДТ лопастного типа с принудительной подачей воды насосом (под давлением) основное регулирование достигается изменением положения регулирующего клапана. Частично также используется регулирование оттоком воды из РК для уменьшения температуры. Хотя на разных режимах рабочая полость ГДТ не всегда полностью заполняет объёмы ячеек, но все их поверхности всегда омываются потоками воды. Это обеспечивает: с одной стороны увеличивает высокий диапазон регулирования и большую его стабильность по сравнению с дисковыми ГДТ; с другой стороны из-за малого объёма ячеек динамические свойства также увеличиваются.
Задача №4.
2. Измерение крутящего момента (Мк). Динамометрические муфты
Фазометрические динамометры с индукционными преобразователями. Принципиальная схема включения с аналоговым выходом: основные элементы и их назначение. Временные диаграммы работы (принцип формирования выходного сигнала). Измеряемая величина (мера) (докажите, что измеряемая величина действительно прямо пропорциональна крутящему моменту). Источники погрешностей.
Особенности конструктивного исполнения. Реализация возможности градуировки при неподвижном вале или проведения измерений на малых частотах вращения. Преимущества и недостатки.
3. Индицирование ДВС. Пьезоматериалы
Что такое пьезоэлектрики? Кристалл кварца и его оси. Физическая природа пьезоэффекта. Продольный и поперечный пьезоэффект. От каких факторов зависит выходной сигнал продольного и поперечного пьезоэффектов? Как должны быть ориентированы грани пластин, вырезаемых из кристалла кварца? В чём преимущества кварца в качестве пьезоматериала (4-6)? Что относится к влияющим факторам пьезоматериалов? В каком диапазоне температур пьезокварц может применяться без охлаждения?
№ 5
1. Гидродинамические тормоза (ГДТ).
ГДТ – тормоза, в которых поглощение мощности происходит в результате гидродинамической работы, затрачиваемой на перемещение жидкости. В ГДТ механическая энергия ДВС преобразуется в кинетическую энергию жидкости, которая в конечном счёте превращается в тепло в результате трения и гидродинамических потерь.
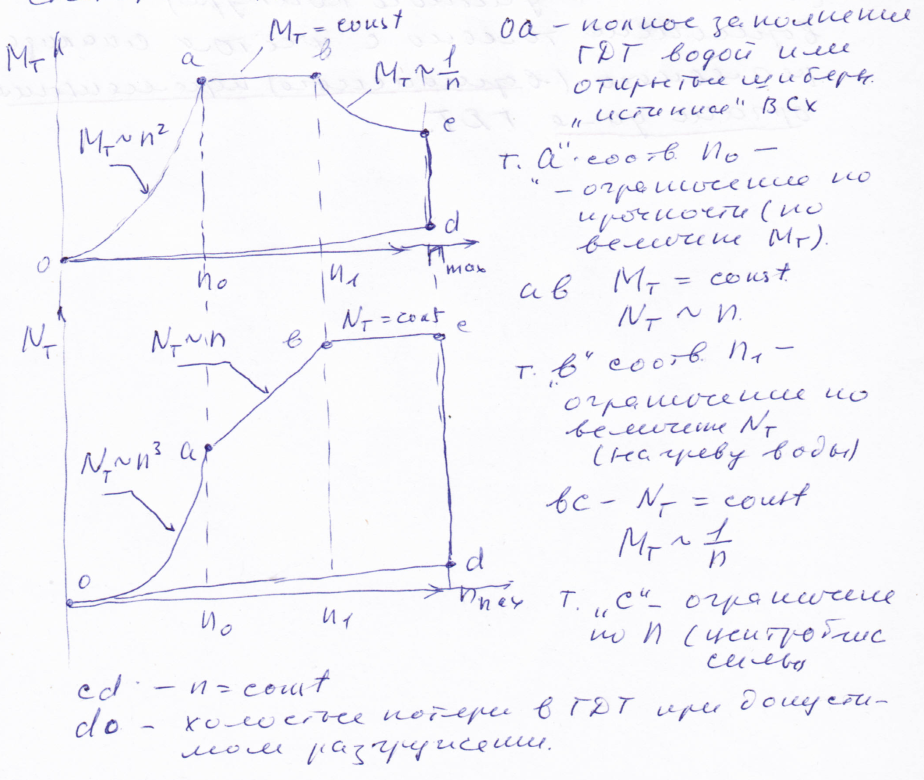
Внешняя скоростная характеристика (ВСХ) ГДТ с учётом ограничений.
Фактически ВСХ – зависимость NТ и МТ от n при полном или частичном ( с учётом ограничений) положения органа управления ГДТ. ВСХ позволяет судить о возможности применения ГДТ для торможения данного ДВС.
Относительный тормозной момент и относительная тормозная мощность в различных зонах ВСХ ГДТ.
Согласование характеристик ДВС и ГДТ с учётом возможных перемещений органа управления ГДТ (сравнение ГДТ переменного и постоянного заполнения).
Возможный диапазон поглощения мощности определяется замкнутым контуром, в пути которого должна располагаться ВСХ ДВС. Однако это условие является необходимым, но недостаточным для эффективного сопряжения ДВС и ГДТ. Частичные скоростные характеристики (ЧСХ) ГДТ лежат в пределах этого контура, что позволяет задавать различные и нагрузочные режимы ДВС. Но реальная оценка возможности регулирования ГДТ в указанных пределах возможна только с учётом анализа реального переменного органа регулирования ГДТ.
Задача №3.
Преимущества и недостатки ГДТ.
Преимущества: 1. относительная простота конструкции. 2. дешевизна изготовления и низкая стоимость эксплуатации. 3. высокая энергоёмкость (минимальные габаритные размеры при NT – idem по сравнению с другими типами тормозов). 4. высокая быстроходность. 5. нечувствительность к перегрузкам. 6. наименьший момент инерции ротора, т.е. уменьшение механической инерционности. Недостатки: 1. отсутствие рекуперации энергии. 2. необратимость. 3. ограниченный (низкий) диапазон регулирования (по сравнению с электрическими машинами). 4. сложность автоматизации. 5. невозможность разгружения до режима ХХ. 6. трудность изменения МТ по реакции статора.
Область применения.
ТК, Турбины.
2. Измерение крутящего момента (Мк). Динамометрические муфты
Фазометрические динамометры с индукционными преобразователями. Принципиальная схема включения с цифровым выходом: основные элементы и их назначение. Временные диаграммы работы (принцип формирования выходного сигнала). Измеряемая величина (мера) (докажите, что измеряемая величина действительно прямо пропорциональна крутящему моменту). Источники погрешностей.
Особенности конструктивного исполнения. Реализация возможности градуировки при неподвижном вале или проведения измерений на малых частотах вращения. Преимущества и недостатки.
3. Индицирование ДВС. Конструкция пьезокварцевого датчика
Элементарная схема и основные элементы. Нарушение линейности характеристики датчика и способ её устранения. Как это реализуется в современных датчиках? Температурная чувствительность датчика: причины её появления. Каким образом температурная чувствительность отражается на результатах измерения давления в цилиндре в различных частях рабочего цикла? На результатах измерения каких показателей это отражается? Какими конструктивными мероприятиями устраняется или существенно уменьшается влияние температуры в современных пьезокварцевых датчиках?
№ 6
1. Электрические тормоза на базе машин постоянного тока (МПТ)
Электрические тормоза представляют собой электрические машины в балансирном исполнении (как правило), вал которых соединён с валом испытуемого ДВС. Механическая энергия двигателя в таких тормозах преобразуется в электрическую.
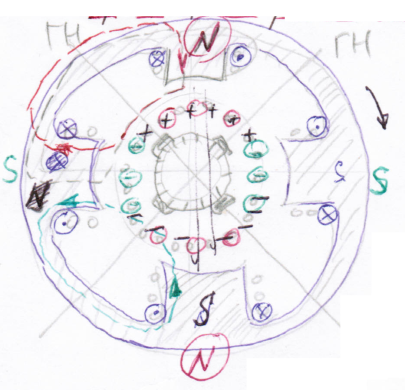
Основные элементы МПТ, их назначение.
![]()
На неподвижной части МПТ расположены полосы и обмотки возбуждения (ОВ). Обмотки соединены так, чтобы при прохождении по ним тока полосы приобретали чередующуюся полярность. На вращающейся части расположена обмотка, в которой индуцируется ЭДС. Поэтому вращающаяся часть называется якорем. От обмотки якоря идут ответвления к коллектору, который представляет собой цилиндрическое тело, состоящее из изолированных медных пластин. Обмотка имеет большое число секций, каждая из которых ответвляется и следующим друг за другом коллекторным пластинкам.
Электродвижущая сила (ЭДС) обмотки якоря.
При вращении якоря в проводниках его обмотки наводится ЭДС (точнее в проводниках, лежащих на внешней поверхности сердечника) e = B*l*V, [B] Тл (Тесла). В обмотке якоря наводится переменное ЭДС, т.к. каждый проводник проходит полосы разной полярности. Для выпрямления ЭДС используется коллектор, с которым соприкасаются щётки. Последние устанавливаются в тех местах, где ЭДС меняет направление, т.е. в середине межполюсного промежутка.
ЭДС обмотки якоря: 1. E = cE*n*Ф, где сЕ – конструктивная постоянная МПТ. 2. сЕ = Р*W/(60a), где Р – число нар полюсов, W – общее число активных проводников якоря, а – число параллельно работающих витков якоря, Ф – поток полюса якоря. 3. n = E/(cE*Ф).
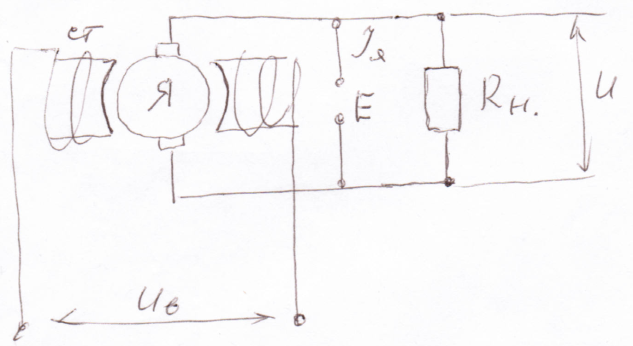
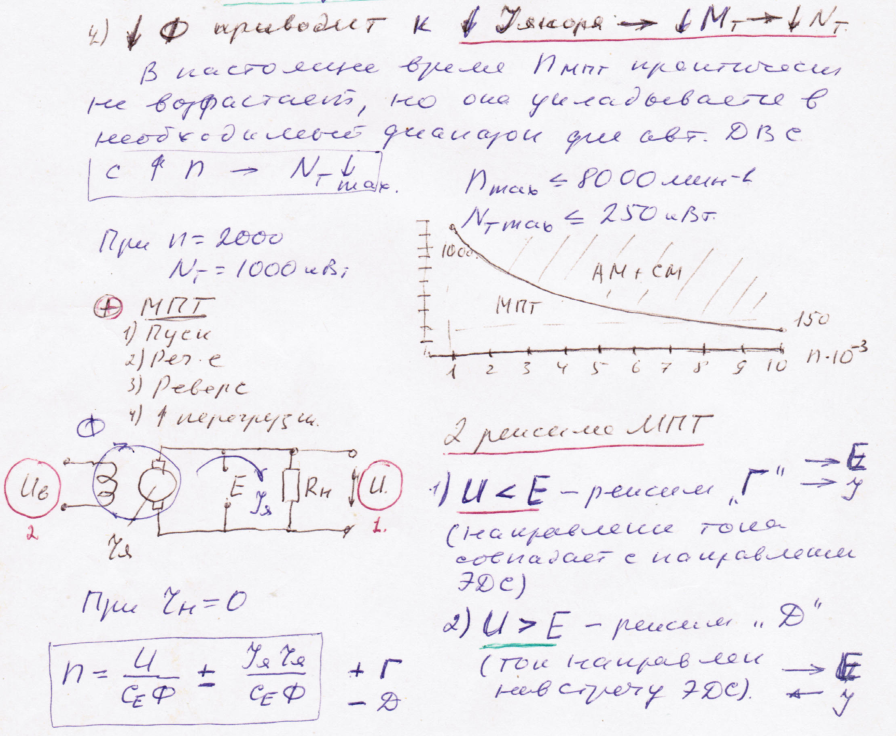
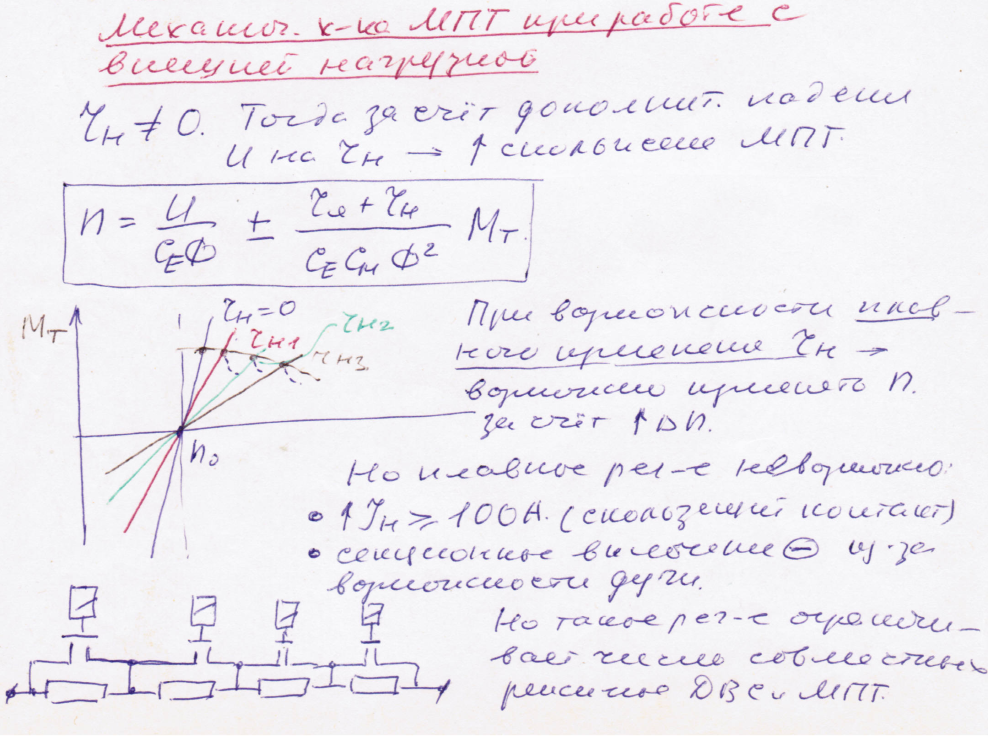
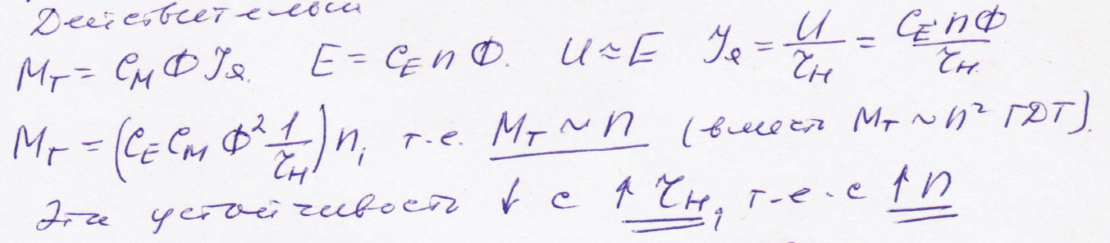
Быстроходность МПТ: влияющие факторы (3) и ограничения (3). Электромагнитный момент МПТ. «Скольжение» МПТ при изменении внешней нагрузки. МПТ в режиме генератора и в режиме двигателя: частота вращения и соотношение ЭДС и напряжения. Механическая характеристика МПТ при работе с внешней активной нагрузкой: возможности регулирования и практическая реализация.
Из выражения для Е следует: 1. для увеличения быстроходности машины, надо увеличить Е (увеличить разность напряжений между коллектором и щётками) (Е = 500В – граница… увеличение Е до 800В). 2. увеличение быстроходности за счёт уменьшения сЕ за счёт уменьшения Р, но увеличивается нагрузка на каждую щётку. 3. увеличение быстроходности за счёт уменьшения сЕ за счёт уменьшения U (число витков), но увеличиваются коммутационные явления между ламелями коллекторов.

Недостатки (3) и область возможного применения.
Выводы: 1. Необратимые потери энергии, её преобразование в тепло и рассеивание её в окружающую среду. 2. Более низкая, как правило, устойчивость режима по сравнению с ГДТ.
3. Неудобства при снятии НХ ДВС: любое изменение нагрузки приводит к значительным изменениям скоростного режима системы МПТ-ДВС. Это изменение тем больше, чем выше n, что требует перенастройки тормоза.
Область применения: 1. обкатка ДВС после ремонта; 2. приёмо-сдаточные испытания.
Задача № 6
2. Измерение частоты вращения. Цифровые измерительные системы 1-го рода
Цифровые измерительные системы 1-го рода (ЦИС-1). Функциональная схема, основные элементы и их назначение, способ задания интервала времени, рабочий процесс, принцип преобразования первичного счёта в численное значение угловой скорости, мера измеряемой величины. Условия работы с примыкающими и непримыкающими интервалами измерения (какие изменения необходимо внести в схему во втором случае?). Связь угловой скорости с числом импульсов счёта, числом кодовых меток и интервалом измерения; “цена” одного импульса (“кванта” скорости).
3. Индицирование ДВС. Градуировка пьезоэлектрических индикаторов
В каких случаях возможна статическая градуировка пьезодатчиков? В чём её недостатки? Каким образом осуществляется градуировка датчика непосредственно на двигателе? Какой датчик используется для этой цели? Способы нанесения нулевой линии индикаторной диаграммы (2). В каких случаях необходима динамическая градуировка пьезодатчиков? Как она проводится? Что ещё определяется по этой градуировке? Как определяется собственная частота индикаторов?
№ 7
1. Электрические тормоза на базе машин постоянного тока (МПТ)
Электрические тормоза представляют собой электрические машины в балансирном исполнении (как правило), вал которых соединён с валом испытуемого ДВС. Механическая энергия двигателя в таких тормозах преобразуется в электрическую.
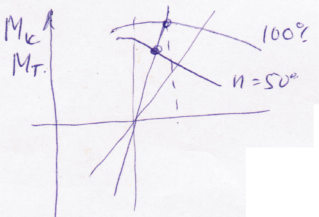
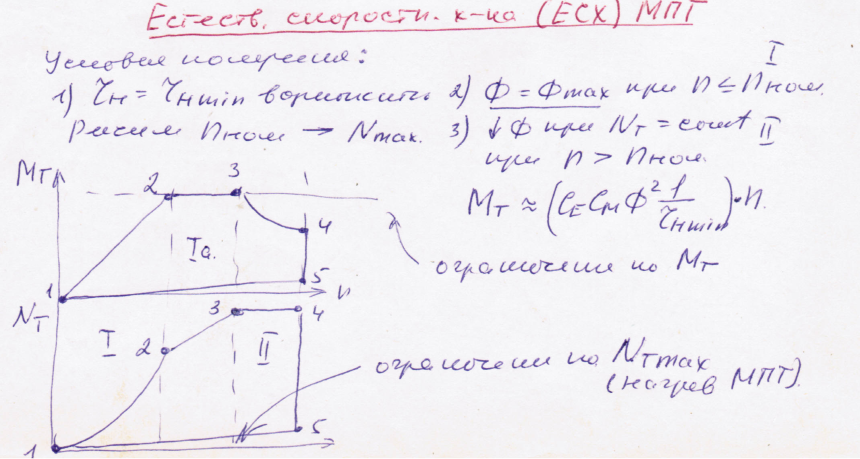
Естественная и внешняя скоростные характеристики (ЕСХ и ВСХ) МПТ: условия снятия, ограничения, зависимости тормозного момента (Мт) и поглощаемой мощности (Nт) от частоты вращения (n).
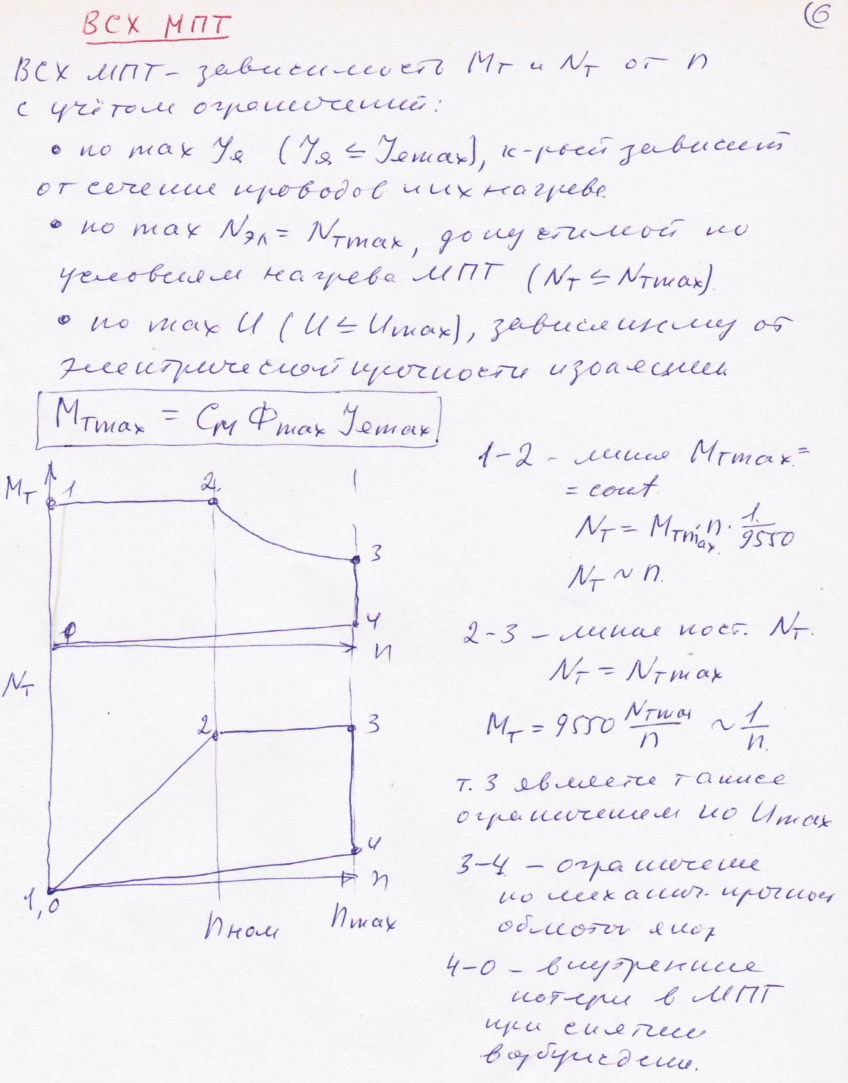
Сравните ЕСХ и ВСХ МПТ с точки зрения согласования характеристик ДВС и тормоза. В каком случае возможно получение ВСХ МПТ? Номинальная и максимальная частота вращения МПТ.
Зоны регулирования МПТ: Способ регулирования МПТ в каждой зоне? Одно- и двухзонные МПТ с точки зрения соответствия их характеристик характеристике ДВС и с точки зрения качества регулирования.
МПТ может регулироваться 2мя путями: 1. Изменением внешней нагрузки при max возбуждении (Ф = Фmax), что соответствует Мтmax, величина которого ограничивается max током якоря Iяmax.
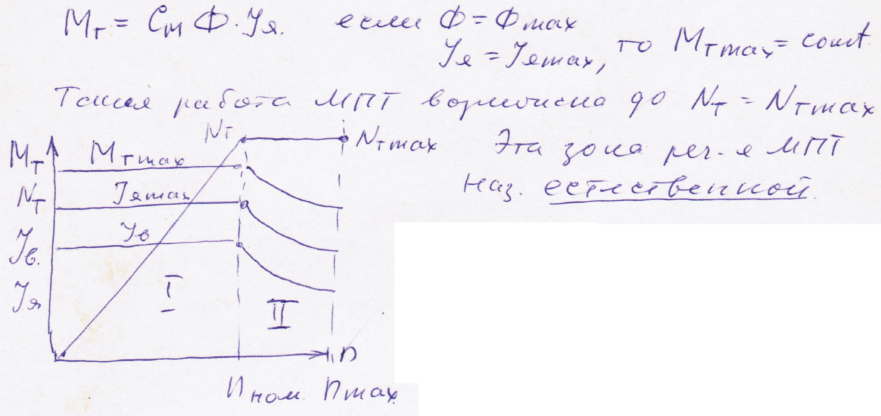
2. при n > nном регулирование возможно только при сохранение NTmax = const, что возможно с уменьшением MT за счёт уменьшения Ф (что достигается уменьшением тока возбуждения в ОВ). Эта зона регулирования называется искусственной, а МПТ, работающими по такой схеме, называется двухзонными (в отличие от однозонной, когда n < nном). Во 2й зоне ухудшается качество регулирования.
2. Измерение частоты вращения. Цифровые измерительные системы 1-го рода
Погрешности ЦИС-1 при измерении средней угловой скорости: источники погрешностей (3) и их выражения. Выражение для суммарной относительной погрешности измерения средней угловой скорости (ср) и её составляющих. Зависимость ср и её составляющих от средней угловой скорости (ср), числа штриховых меток (z) и заданного интервала измерения.(tи), числа штриховых меток (z), погрешности кодовых меток (0), погрешности задания интервала времени (tи).
3. Индицирование ДВС. Измерение заряда по величине напряжения
Ёмкость датчика. Вычисление величины заряда и вычисление величины напряжения. Чувствительность датчика по напряжению. Соединительный кабель и его влияние на величину выходного напряжения. Требования к соединительному кабелю (3-4). Измерительная цепь включения пьезодатчика. Её влияние на величину выходного сигнала. Задача №18.
№ 8
1. Электрические тормоза на базе машин постоянного тока (МПТ)
Электрические тормоза представляют собой электрические машины в балансирном исполнении (как правило), вал которых соединён с валом испытуемого ДВС. Механическая энергия двигателя в таких тормозах преобразуется в электрическую.
Система “генератор-двигатель” (система Г-Д). Принципиальная схема, основные элементы.
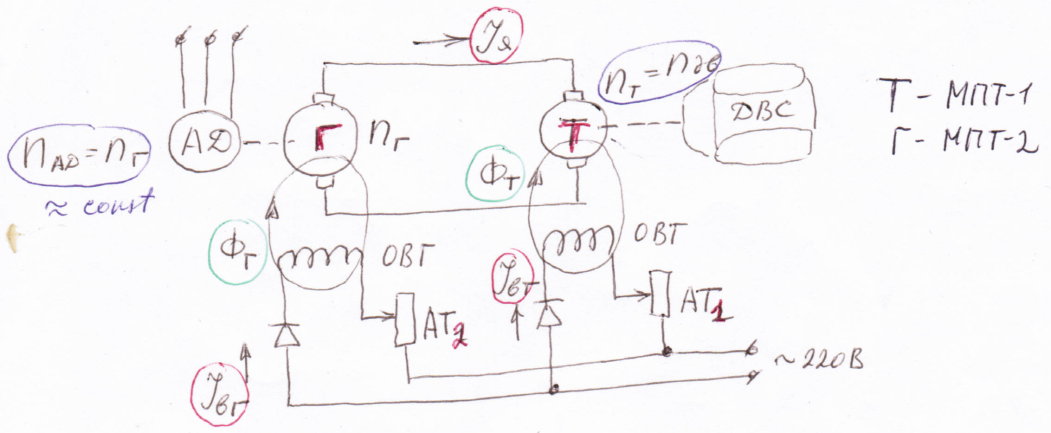
Эта схема включает 2 МПТ с независимым возбуждением. Одна из них (МПТ-1) жестко связана с КВ ДВС и условно названа тормозом Т. Тормоз электрически связан с машинным преобразователем энергии (умформер). Последняя состоит из МПТ-2, которая условно названа генератором Г, и асинхронного двигателя (АД), валы которых соединены друг с другом муфтой. Умформер (генератор, соединенный с АД) обеспечивает преобразование 3х фазного тока в постоянный и наоборот. Автотрансформаторы АТ-1 и АТ-2 предназначены для регулирования тока возбуждения в обмотках возбуждения генератора и тормоза (ОВГ и ОВТ). Практически это осуществляется одной рукояткой, связанной с АТ-1 и АТ-2 ОВГ и ОВТ, но последовательность управления этими АТ небезразлична.
Чем обеспечивается высокая жёсткость механической характеристики МПТ в системе Г-Д? Как происходит рекуперация энергии? КПД рекуперации? Зоны регулирования МПТ в системе Г-Д. Зависимость скольжения МПТ от скоростного режима в 1-й и во 2-й зонах регулирования. Зависимости тока генератора, напряжения якоря МПТ и тока возбуждения тормоза от частоты вращения в различных зонах регулирования по внешней скоростной характеристике (ВСХ) МПТ.
2. Измерение частоты вращения. Цифровые измерительные системы 1-го рода
Суммарная погрешность ЦИС-1 при измерении мгновенной угловой скорости (при разгоне). Выражение для суммарной относительной погрешности измерения мгновенной угловой скорости (), считая, что из погрешности средней скорости учитывается только погрешность квантования. Задача №9.
3. Индицирование ДВС. Регистрация сигналов давления
Техническая реализация дискретизации угла поворота коленчатого вала (на примере фотоэлектрического преобразователя фирмы Цейс или преобразователя типа ВЕ). Элементы схемы, их назначение, способ регистрации, диаграмма работы, принцип уменьшения шага дискретизации. Выбор угла дискретизации. Чем определяется выбор частоты дискретизации или угла дискретизации? Время регистрации и его связь с частотой дискретизации. Задача № 21.
№ 9
1. Электрические тормоза на базе машин постоянного тока (МПТ)
Электрические тормоза представляют собой электрические машины в балансирном исполнении (как правило), вал которых соединён с валом испытуемого ДВС. Механическая энергия двигателя в таких тормозах преобразуется в электрическую.
Система “генератор-двигатель” (система Г-Д). Принципиальная схема, основные элементы.
Эта схема включает 2 МПТ с независимым возбуждением. Одна из них (МПТ-1) жестко связана с КВ ДВС и условно названа тормозом Т. Тормоз электрически связан с машинным преобразователем энергии (умформер). Последняя состоит из МПТ-2, которая условно названа генератором Г, и асинхронного двигателя (АД), валы которых соединены друг с другом муфтой. Умформер (генератор, соединенный с АД) обеспечивает преобразование 3х фазного тока в постоянный и наоборот. Автотрансформаторы АТ-1 и АТ-2 предназначены для регулирования тока возбуждения в обмотках возбуждения генератора и тормоза (ОВГ и ОВТ). Практически это осуществляется одной рукояткой, связанной с АТ-1 и АТ-2 ОВГ и ОВТ, но последовательность управления этими АТ небезразлична.
Уравнение механической характеристики МПТ в составе системы Г-Д (вывод формулы). Анализ механических характеристик МПТ в составе системы Г-Д.
Причины отклонения действительных механических характеристик МПТ в составе системы Г-Д от расчётных.
Реальные МХ МПТ отличаются от расчётных и в общем случае являются нелинейными. На режиме ХХ ток в обмотке якоря практически отсутствует. Магнитный поток создаётся током, проходящим по ОВ. Магнитное поле симметрично относительно полюсов. Под нагрузкой по обмотке цепи якоря потечёт ток, который создаёт в магнитной системе МДС якоря. Воздействие поля якоря на поле возбуждения называется реакцией якоря. Если МПТ работает в режиме «Г» (при вращении по часовой стрелке), то в результате реакции якоря результирующее магнитное поле будет ослаблено под «набегающим» полюсом и усилено над «сбегающим».
Запуск ДВС с помощью МПТ в данной системе.
При запуске с помощью МПТ необходимо: создать max крутящий момент на тормозе, для чего необходимо создать максимальное возбуждение на ОВТ (Фт – max); обеспечить плавное трогание ДВС с места (плавное нарастание тока якоря), для чего следует создать минимальное напряжение на ОВГ. Т.о. проворачивание ДВС при запуске осуществляется увеличением напряжения на ОВГ и, следовательно, увеличением тока якоря и Мт.
Переход с одного скоростного режима на другой при снятии внешней скоростной характеристики ДВС.
Переход тормоза с режима проворачивания ДВС на режим его торможения (нагружения) происходит автоматически: достаточно включить подачу топлива (в дизелях) или зажигания (в ДсИЗ). Тогда тормоз (Т) переходит из двигательного режима в генераторный, а генератор (Г), наоборот, переходит в режим электродвигателя, вращая вал АМ.
Преимущества и недостатки МПТ в качестве нагружающих устройств ДВС.
Преимущества: 1. Возможность рекуперации энергии. 2. Возможность проворачивания ДВС. 3. Широкий диапазон регулирования по нагрузке. 4. Устойчивость и стабильность процесса управления МПТ. 5. Плавное и бесступенчатое регулирование. 6. Высокая «жёсткость» ЭМХ в режиме Г-Д, что позволяет снижать НХ ДВС практически не трогая органы управления тормозом. 7. Относительно небольшая мощность управления. 8.
Недостатки: 1. Высокая стоимость производства и эксплуатации (особенно системы Г-Д). 2. Ограниченный скоростной режим (n ≤ 8000 мин-1)/ 3. Резкое снижение максимальной мощности с увеличением скоростного режима. 4. Электромагнитная инерционность МПТ и практическая невозможность форсирования переходных процессов превышением номинального напряжения. Это ограничивает возможности использования МПТ в составе быстроходных САУ.