

3.2 Применение метода состояний для устройств и систем с резервированием
Рис.
4.7. Система с дублированием
Рис.8.
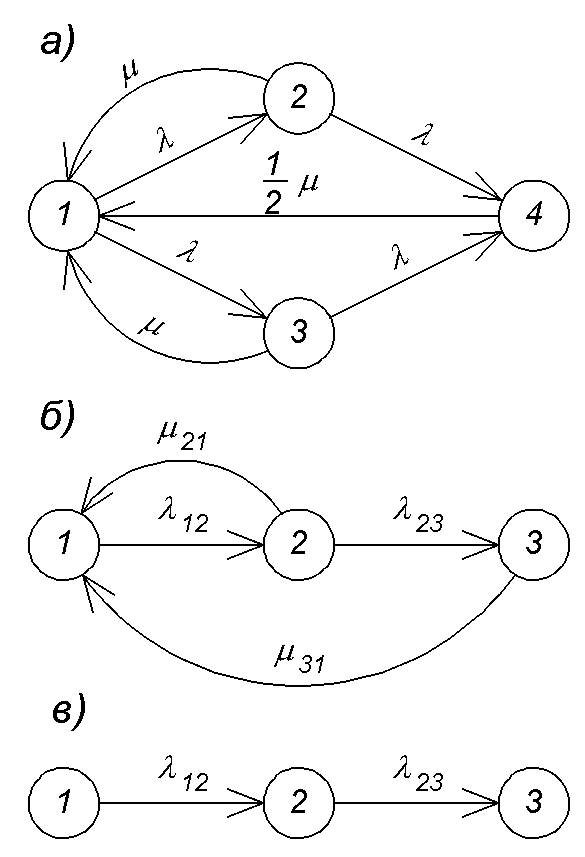
Графы систем с резервированием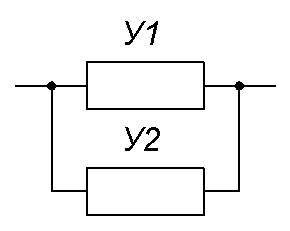
![]() ,
а интенсивность восстановления каждого
из них -
,
а интенсивность восстановления каждого
из них -
![]() .
Допустим, что при отказе любого из
устройств У1, У2, оно восстанавливается.
Если же до момента восстановления
отказавшего устройства отказывает и
другое устройство, то восстанавливаются
оба устройства и система в целом не
функционирует пока они не будут
восстановлены. С учетом сделанных
предположений рассматриваемой системе
отвечает граф состояний, изображенный
на рис.8, а.
В состоянии 1 работоспособны У1 и У2. В
состоянии 2 устройство У2 работоспособно,
а У1 восстанавливается. В состоянии 3 У1
работоспособно, а У2 восстанавливается.
В состоянии 4 восстанавливаются У1 и У2.
Учитывая симметричность, граф рис. 8, а
можно упростить. При этом состояния 2 и
3 объединяются в одно, отвечающее случаю,
когда отказало какое-либо одно из
устройств, а другое остается исправным.
Упрощенный граф состояний представлен
на рис..8, б
и ему отвечают, соответственно, следующие
интенсивности переходов из состояния
в состояние:
.
Допустим, что при отказе любого из
устройств У1, У2, оно восстанавливается.
Если же до момента восстановления
отказавшего устройства отказывает и
другое устройство, то восстанавливаются
оба устройства и система в целом не
функционирует пока они не будут
восстановлены. С учетом сделанных
предположений рассматриваемой системе
отвечает граф состояний, изображенный
на рис.8, а.
В состоянии 1 работоспособны У1 и У2. В
состоянии 2 устройство У2 работоспособно,
а У1 восстанавливается. В состоянии 3 У1
работоспособно, а У2 восстанавливается.
В состоянии 4 восстанавливаются У1 и У2.
Учитывая симметричность, граф рис. 8, а
можно упростить. При этом состояния 2 и
3 объединяются в одно, отвечающее случаю,
когда отказало какое-либо одно из
устройств, а другое остается исправным.
Упрощенный граф состояний представлен
на рис..8, б
и ему отвечают, соответственно, следующие
интенсивности переходов из состояния
в состояние:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
Здесь предполагается, что при восстановлении
двух отказавших ветвей интенсивность
восстановления падает в два раза по
сравнению с восстановлением только
одной ветви, т.к. число ремонтников
остается неизменным.
.
Здесь предполагается, что при восстановлении
двух отказавших ветвей интенсивность
восстановления падает в два раза по
сравнению с восстановлением только
одной ветви, т.к. число ремонтников
остается неизменным.
Опираясь на рассмотренную в п..3.1 методику, составляем систему уравнений для графа (рис.8, б):
 (.27)
(.27)
Для
решения системы определяем начальные
условия в виде
,
,
![]() ,
то есть считаем, что система исходно
абсолютна исправна. Так же как и в
п.4.3.2, решать систему (.27) будем с помощью
операторного метода, учитывая, что
,
то есть считаем, что система исходно
абсолютна исправна. Так же как и в
п.4.3.2, решать систему (.27) будем с помощью
операторного метода, учитывая, что
Представим.27) в операторной форме:
 .28)
.28)
Найдем определитель системы (.28):
 , .29)
, .29)
где
![]() – элемент матрицы на пересечении
-строки
и
-го
столбца,
– элемент матрицы на пересечении
-строки
и
-го
столбца,
![]() – алгебраическое дополнение. После
суммирования получим:
– алгебраическое дополнение. После
суммирования получим:
![]() 30)
30)
Аналогичным образом, заменяя поочередно столбцы определителя.29) столбцом свободных членов системы (.28), получим выражения определителей:
 , (.31)
, (.31)
 , .32)
, .32)
 . .33)
. .33)
Воспользовавшись формулой Крамера, находим решение системы.28):
![]() ,
,
![]() ,
,
![]() . 34)
. 34)
Далее, как и в п.3.1, с помощью таблицы обратных преобразований по Лапласу] от полученных изображений переходят к оригиналам.
Перейдем
от общего решения к одному важному для
практики случаю, соответствующему
системе с дублированием, но без
восстановления. Для такой системы
очевидно
![]() ,
,
![]() и граф на рис.8, б
трансформируется в граф на рис.8, в.
и граф на рис.8, б
трансформируется в граф на рис.8, в.
Определители принимают более простой вид:

а
определитель
![]() остается без изменения:
остается без изменения:
![]() .
Воспользовавшись.34) и принимая во
внимание, что
.
Воспользовавшись.34) и принимая во
внимание, что
![]() ,
,
![]() ,
получаем
,
получаем
![]() , (.35)
, (.35)
![]() , (.36)
, (.36)
![]() . .37)
. .37)
Переходим от изображений 35),.36), (.37) к оригиналам:
![]() , (.38)
, (.38)
![]() , (.39)
, (.39)
![]() . (.40)
. (.40)
Работоспособной системе отвечают состояния 1 и 2 графа рис..8, в. Следовательно, для данного случая вероятность безотказной работы системы с дублированием
![]() , (.41)
, (.41)
а вероятность отказа соответственно:
![]() . (.42)
. (.42)
Метод состояний может быть с успехом использован для оценки надежности сложных радиоэлектронных систем с учетом «надежности» человека-оператора. Такие системы относятся к классу человеко-машинных систем. В экстремальных ситуациях система может автоматически выполнять функции без оператора, а оператор может рассматриваться как многофункциональное резервное звено системы. На рис,9 изображен возможный граф, отображающий человеко-машинную систему. Состояние 1 графа отвечает исправной системе и работоспособному оператору. Из-за различного рода перегрузок (физических, психических и т.д.) оператор может на некоторое время утратить нормальную работоспособность, но система при этом останется исправной и будет выполнять свои функции нормально без оператора. Она даже может адаптироваться к условиям функционирования. Такой ситуации отвечает состояние 2 графа. Из этого состояния человеко-машинная система может вернуться (или не вернуться) в состояние 1 после исчезновения перегрузок. Если в системе произошел отказ, но его последствия могут быть скомпенсированы оператором (например, с помощью ручного управления, регулировки, подстройки), то в целом человеко-машинная система остается исправной и будет находиться в состоянии 3. Если имеется возможность, то через некоторое время с помощью оператора неисправность в системе может быть устранена и человеко-машинная система будет снова возвращена в состояние 1.
Рис.9.
Граф человеко-машинной системы
Оценка вероятности безотказной работы человеко-машинной системы может быть осуществлена с использованием метода состояний.