

4. Цифровой тахометр, его достоинства и недостатки, анализ погрешностей
В
последнее время широкое распространение
получили тахометры с цифровой частью,
то есть цифровые тахометры. Они строятся
на основе тех же 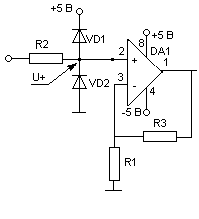
Рис. 11 . Нормирующий усилитель
датчиков, что и аналоговые. Добавляется только цифровая часть. Рассмотрим подробнее цифровую часть. (Принципиальная схема цифровой части представлена ниже)
Цифровая часть представляет собой нормирующий усилитель, генератор тактовых импульсов, АЦП, блок счета и индикации. Нормирующий усилитель как правило состоит из операционного усилителя и группы резисторов, включенных по определенной схеме, например как на рис. 11.
Он служит для усиления и нормирования аналогового сигнала, поступающего на вход цифровой части. Диоды представленные на схеме служат для ограничения сигнала в пределах от 0 до 5 В.
Генератор
тактовых импульсов (ГТИ) предназначен
для синхронизации и получения необходимой
частоты.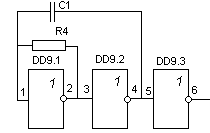
Рис. 12 Генератор тактовых импульсов.
ГТИ нетрудно реализовать используя интегральную микросхему К555ЛН1.
Частоту генерируемых импульсов можно найти по формуле
 (4.1)
(4.1)
где С1 – емкость конденсатора С1
R4 – сопротивление резистора R4
Зная fИМП и R4 можно определить емкость конденсатора С1.
Блок счета и индикации в зависимости от того, что требуется получить на выходе цифровой части, может присутствовать или отсутствовать. Если необходимо получить только код, то этот блок будет отсутствовать.
Реализовать АЦП достаточно просто, используя цифроаналоговый преобразователь (ЦАП) на однокристальной микросхеме К572ПА1, операционный усилитель К140УД9 и компаратор напряжения К554СА3.
Рассмотрим более подробно компаратор напряжения К554СА3. Компаратор осуществляет переключение выходного напряжения, когда изменяющийся выходной сигнал становится выше или ниже определенного уровня. Компаратор принадлежит к классу формирователей, предназначенных для перехода от аналоговых сигналов к цифровым. Поэтому оконечные каскады компараторов обычно конструируют таким образом, чтобы выходное напряжение соответствовало бы принятым логическим уровням распространенных цифровым микросхем. Компаратор напряжения К554СА3 может питаться как от +-15 В так и +-9 В и даже +-5 В связи с этим применение компаратора становится разнообразным.
ПНК последовательного счета строятся либо по классическому методу последовательно, либо с промежуточным преобразованием входного напряжения в какую либо другую аналоговую величину. Промежуточное преобразование снижает точность измерения тем не менее именно по этому методу строились, в основном цифровые измерители напряжения. Это объясняется тем, что ЦАП(преобразователь напряжение код) реализующие классический метод последовательного счета содержат формирователь ступенчатого эталонного напряжения, реализация которого на дискретных элементах приводила к большому объему оборудования по сравнению с другими типами ЦАП. Однако положение изменилось с развитием интегральной технологии и в настоящее время ЦАП исполняется в корпусе одной интегральной микросхемы
Измеренное напряжение высвечивается на индикаторах типа АЛС324Б предварительно пройдя через двоично-десятичные счетчики типа К155ИЕ2и дешифраторы КР514ИД2.
Анализ погрешностей:
В состав схемы цифрового выхода входит нормирующий усилитель (см рис. 11) который масштабирует выходное напряжение с термопары.
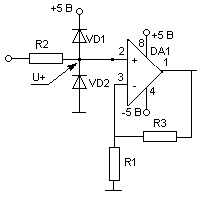
VD1, VD2 – схема защиты
Данная схема вносит в проектируемый прибор погрешность. Суммарная погрешность нормирующего усилителя складывается из погрешности напряжения смещения (Uсм), погрешности тока сдвига (Iсдв), погрешности обратного тока диодов (В схеме защиты используются диоды марки 1N914A с обратным током утечки IД ОБР.=25 нА. Рассмотрим худший случай, когда (IД ОБР.== 2*IД ОБР.) (Iд обр.), погрешности КООС (КООС), погрешности разброса параметров сопротивлений от номинального значения (R1 R2 MAX).
Оценка погрешности от напряжения смещения (Uсм)
Uсм= Uсм*Ку (4.2)
где Ку – коэффициент усиления (в нашем случае Ку=1)
Оценка погрешности от обратного тока диодов (Iд обр )
U+д= IД ОБР.*R2 (4.3)
Iд обр= U+д*Ку (4.4)
Оценка погрешности от КООС (КООС)
 ,
(4.5)
,
(4.5)
где Кд – коэффициент усиления дифференциального сигнала (Кд=1);КС – коэффициент усиления синфазного сигнала
КООС=UВХ СИН MAX*KC, (4.6)
где UВХ СИН MAX – синфазное максимальное входное напряжение.
Оценка погрешности от тока сдвига (Iсдв)
U+=IСДВ*R2 (4.7)

 (4.8)
(4.8)
Достоинства и недостатки цифрового тахометра.
К достоинствам можно отнести то, что на выходе получаем цифровой код, а не аналоговый. То есть уже не требуется дополнительных преобразований напряжение - код. Эту информацию непосредственно может использовать и БЦВМ, и оператор. Недостатки проявляются в дополнительных погрешностях. Помимо погрешностей самого датчика добавляются погрешности цифровой части (см выше). Кроме того, семисегментные индикаторы хуже воспринимаются, чем стрелочные.