

4. Парабола
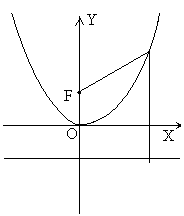
Параболой называется множество точек плоскости, одинаково удаленных от заданной прямой (директрисы) и заданной точки (фокуса)
П усть
точка F(
усть
точка F(![]() ,
0) – фокус. Прямая BD –
директриса параболы ;
,
0) – фокус. Прямая BD –
директриса параболы ;
М(х,у) – произвольная точка параболы, FD = Р >0 параметр параболы.
По
определению параболы МF
= МВ. Уравнение параболы с вершиной в
точке 0(0;0) и директрисой BD,
заданной уравнением х =
![]() ,
имеет канонический вид:
,
имеет канонический вид:
у2 = 2 ρх .
Замечание:
если положить х =
,
то y=![]() p,
то есть NF=p
(NF
OX).
Эксцентриситет параболы
= 1.
p,
то есть NF=p
(NF
OX).
Эксцентриситет параболы
= 1.
Другие виды параболы:
у
 2
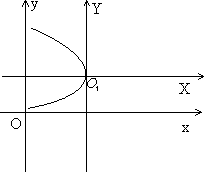
= - 2 ρх - парабола с осью симметрии OХ,
фокусом F(-
,
0) и директрисой x=
.
2
= - 2 ρх - парабола с осью симметрии OХ,
фокусом F(-
,
0) и директрисой x=
.
х
X
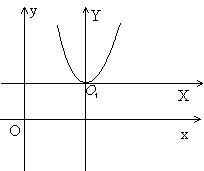
2 = 2 ρу- парабола с осью симметрии OY, фокусом F(0, ) и директрисой y= - .

х2 = -2 ρу- парабола с осью симметрии OY, фокусом F(0,- ) и директрисой y= .
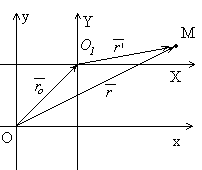
Преобразования координат.
1.Параллельный перенос.
Изменяется начало координат, а направление осей и масштаб остаются неизменны.
![]() ,
,
![]() ’{X,Y},
{x,
y},
=
1+
0,
тогда
’{X,Y},
{x,
y},
=
1+
0,
тогда
![]() или
или
![]()
- формулы преобразования координат при параллельном переносе осей координат
2.Поворот осей координат .
П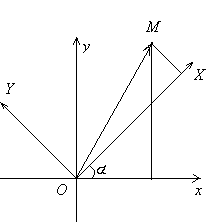 усть
М(х;у) в системе xoy, M(X,Y)
в системе XOY.
усть
М(х;у) в системе xoy, M(X,Y)
в системе XOY.
Тогда формулы перехода при повороте осей координат на угол
к системе хоу имеют вид:
![]() ,
,
а
к системе XOY:![]() .
.
Кривые 2-го порядка с осями симметрии, параллельными осям координат.
1.Эллипс.
У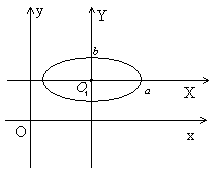 равнение
эллипса в системе XOY:
равнение
эллипса в системе XOY:
![]() .
.
Уравнение эллипса со смещенным в точку О1(m,n) центром:
![]() .
.
Возможны случаи вырождения эллипса в точку, например,
![]() -
точка O1 (m,n),
или мнимый эллипс:
-
точка O1 (m,n),
или мнимый эллипс:![]() .
.
2.Гипербала.
У равнение
гиперболы с центром в точке О1(m,n):
равнение
гиперболы с центром в точке О1(m,n):
![]() ,
(1).
,
(1).
Уравнение
гиперболы, вырожденной в свои асимптоты![]() ,
,
имеет
вид:
![]() .
.
Уравнение
гиперболы, сопряженной к данной:
![]() ,
(2).
,
(2).
3. Парабола.
Парабола с вершиной в точке О1(m,n), с осью симметрии параллельной ОХ, р>0.
|
Парабола с вершиной в точке О1(m,n), с осью симметрии параллельной ОХ.
|
Парабола с вершиной в точке О1(m,n), с осью симметрии параллельной ОY.
|
Парабола с вершиной в точке О1(m,n), с осью симметрии параллельной ОY.
|


Если сравнить уравнения кривых 2-го порядка с осями симметрии, параллельными осям координат с общим уравнением кривой второго порядка, то очевидно, всюду коэффициент с произведением координат отсутствует, т.е. а12 = 0 и
если кривая эллиптического типа, то а11 а22 >0
если кривая гиперболического типа, то а11 а22 <0
если кривая параболического типа (парабола или ее вырождения в пару параллельных прямых или пару слившихся прямых), то выполняется условие а11 а22 = 0.
Полярная система координат.
При решении многих задач аналитической геометрии оказывается более удобным определять положение точки на плоскости не прямоугольными декартовыми координатами, а так называемыми полярными координатами.
Система
полярных координат задается полюсом -
точкой О и полупрямой, исходящей из
полюса («луч»-![]() - полярная ось).
- полярная ось).
|
ОМ = ρ, МОρ =. Числа ρ и определяют положение точки М относительно системы координат, их называют полярными координатами точки М(ρ;).
|

Чтобы
установить взаимнооднозначное
соответствие между точками плоскости
и координатами этой точки, ограничим
изменение полярного угла
![]() промежутком -<
(или иным промежутком длины 2π). Значения
,
удовлетворяющие этому условию, называют
главными значениями. Назовем полярные
координаты ρ,
основными, если ρ ≥0, а
есть главное значение полярного угла,
т.е. если -<
.
промежутком -<
(или иным промежутком длины 2π). Значения
,
удовлетворяющие этому условию, называют
главными значениями. Назовем полярные
координаты ρ,
основными, если ρ ≥0, а
есть главное значение полярного угла,
т.е. если -<
.