

Контролери -серії
1. Загальні поняття
Клас та місце контролерів - серії серед інших контролерів MITSUBISHI Electric можна подати у вигляді, як на рис. 1.
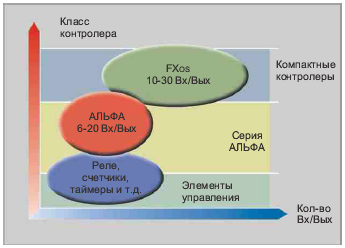
Рис. 1. Контролери -серії серед інших контролерів
Контролери -серії – це ряд контролерів, розроблених як компактний, універсальний виріб для вирішення нескладних завдань керування всюди, де необхідно гнучко вирішувати завдання автоматизації. Будь-який модуль -серії дає змогу контролювати стан давачів та своєчасно реагувати на зміну стану системи. Звіт про стан контролера на рідинно-кристалічному дисплеї дає можливість контролювати технологічний процес.
Особливості -серії:
наявність вбудованої клавіатури та дисплея для програмування і керування;
виходи з високою навантаженою здатністю;
компактність;
широкий набір базових функцій;
EEPROM;
годинник реального часу;
пакет програмування AL-PCS/WIN-E, що дає можливість керувати та програмувати за допомогою комп’ютера.
-серія запроектована для вирішення завдань автоматизації освітлення, системи вентиляції повітря, насосів, невеликих потоко-транспрортних систем, турнікетів, доступу, систем охорони, оранжерей тощо.
На рис. 2 зображено загальний вигляд типового модуля контролерів -серії.
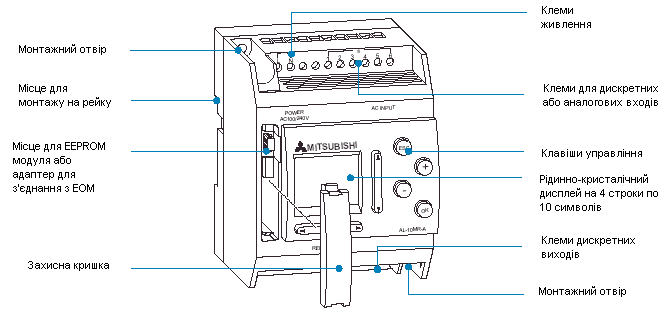
Рис. 2. Загальний вигляд контролерів -серії.
MITSUBISHI Electric випускає варіанти виконання контролерів -серії, наведені у табл.1, з таким маркуванням:
AL |
– |
10 (6/20) |
M |
R (T) |
– |
A (D) |
Назва серії |
|
Загальна кількість входів та виходів (напр. 10) |
Призначення модуля: М – головний модуль |
Тип виходу: R – релейний, Т – транзисторний |
|
Тип живлення контролера: А – ~100-240 В, D - =24 В |
Таблиця 1
Моделі контролерів -серії
Модель |
Напруга, В |
Варіант виконання |
|||
Входи |
Виходи |
||||
Тип |
Кількість |
Тип |
Кількість |
||
AL-6MR-A |
~100-240 |
~100-240 |
4 |
Реле |
2 |
AL-10MR-A |
6 |
Реле |
4 |
||
AL-10MR-D |
=24 |
=24 |
6 |
Реле |
4 |
AL-10MT-D |
6 |
Транзистор |
4 |
||
AL-20MR-A |
~100-240 |
~100-240 |
12 |
Реле |
8 |
AL-20MR-D |
=24 |
=24 |
12 |
Реле |
8 |
AL-20MT-D |
12 |
Транзистор |
8 |
||
Контролери -серії (=24 В) можуть підтримувати до восьми цифрових або аналогових входів (сигнал 0-10 В) з роздільною здатністю 8 біт. Процесор обробки аналогового сигналу має функцію контролю та вбудований тригер Шмідта.
Рідинно-кристалічний дисплей контролерів -серії має чотири рядки по 10 символів з можливістю контролю за ходом виконання програми, захист за паролем, індикацію функціональних блоків під час програмування.
Контролер -серії підключається до комп’ютера за допомогою спеціального кабеля (AL-232CAB) за інтерфейсом RS-232 та адаптера для з’єднання з ЕОМ.