

2.2. Система управления ракетой
Состав и назначение
В состав системы управления ракетой (СУР) входят блок формирования команд управления (БФКУ), блок управления (БУ), два нулевых привода ПГ-11 и один рулевой привод ПГ-10.
БЖУ - литой корпус из алюминия с армированными металлическими втулками, внутри которого находится датчик угла тангажа ДУТ и электронная схема, расположенная на двусторонних печатных платах. Корпус с двух сторон закрыт герметично металлическими крышками с резиновыми прокладками. БФКУ формирует траекторию ракеты в зависимости от начальных условий пуска и сигналов управления от ГСН (на ракетах МЛ и МП) или аппаратуры радиокомандного наведения (на ракете МР).
БУ - литой корпус из алюминиевого сплава, представляющий собой круглое основание с четырьмя бобышками для крепления к ракете. С одной стороны основания установлены чувствительные элементы (два датчика линейных ускорений (ДЛУ), три датчика угловых ускорений (ДУУ) и датчик угла крена (ДУК) с другой стороны - две односторонних печатных платы, предназначенных для преобразования и усиления мощности сигналов, идущих на рулевые приводы. Основание БУ с двух сторон закрыто металлическими колпаками с резиновыми уплотнительными кольцами.
В корпусах БЖУ и БУ предусмотрены отверстия, чтобы регулировать подстроечные резисторы электронных схем. Для герметизации блоков отверстия закрыты резиновыми заглушками.
Рулевые приводы ПГ-11 предназначены для поворота рулей ракеты по I и II каналам. Эти каналы предназначены для стабилизации и управления ракетой по курсу и тангажу. В основу управления каналами положена статическая двухконтурная система стабилизации с использованием сигналов датчиков ДУУ и ДЛУ.

Конструкция рулевых приводов ПГ-11 и ПГ-10 рассмотрена в разд. 2.2, с. 17.
Система управления ракетой обеспечивает;
стабилизацию ракеты относительно центра масс по трем осям связанной с ракетой системы координат;
управление ракетой на траектории по сигналам наведения;
безопасность старта ракеты с самолета-носителя и окончание переходных процессов от стартовых возмущений к началу управления по сигналам наведения;
выполнение ракетой маневра "вертикальная горка" для увеличения угла подхода ракеты к цели;
программное ограничение перегрузки ракеты.
Чувствительные элементы
Датчик угла крена ДУК (тангажа ДУТ) предназначен для измерения соответствующих углов при полете ракеты. Он представляет собой трехстепенной свободный гироскоп, к внешней рамке 2 которого прикреплен потенциометр 3 (рис. 2.1). При повороте ракеты вместе с корпусом датчика относительно оси ОХ1 на угол крена ось гироскопа ОУГ сохраняет свое положение в инерционном пространстве, а плоскость внешней рамки 2 остается перпендикулярной оси вращения ротора I. Таким образом щетка токосъемника 4, установленная на корпусе датчика, повернется относительно потенциометра 3 на угол равный углу крена ракеты.
Питание потенциометра 3 осуществляется через коллекторные кольца 5. Для обеспечения определенного взаимного положения рамок гироскопа перед началом работы предусмотрен механизм арретирования 6, приводимый в действие штоком электромагнита 7.
Датчик линейных ускорений ДЛУ выдает сигнал, пропорциональный перегрузке. Кинематическая схема датчика приведена на рис. 2.2. Чувствительным элементом ДЛУ является масса I, не сбалансированная относительно оси подвеса XX . На массе закреплен рычаг 2 с шариком поводковой передачи, входящим в паз поводка 3. Поводок через пластинчатые пружины 4 соединен с корпусом, на котором закреплен потенциометр 6. На поводке установлен щеточный контакт 5 для снятия сигнала. Датчик имеет арретирующее устройство, предотвращающее перемещение щетки по потенциометру.
Датчик угловых ускорений ДУУ предназначен для измерения углового ускорения ракеты относительно какой-либо ее оси. Кинематическая схема ДУУ приведена на рис. 2.3. Чувствительным элементом ДУУ является двухстепенной гироскоп I, связанный через поводковую передачу 6 с индуктором. Индуктор выполняет функции узла съема сигнала, демпфера и узла силовой обратной связи. Индуктор представляет собой электромагнитную систему и состоит из пермаллоевого магнитопровода 4 с двумя встроенными в него постоянными магнитами 3, пермаллоевого ротора 5 и двух сигнальных катушек 2.

Рис. 2.3.Кинематическая схема датчика углового ускорения
В среднем положении рамку гироскопа удерживает магнитная пружина, создаваемая потоками подмагничивания (образованы постоянными магнитами), которые, замыкаясь, через концевые части ротора, устанавливают его в положение максимальной проводимости, т.е. в среднем положении. При вращении ракеты вокруг оси ZZ возникает гироскопический момент, отклоняющий рамку гироскопа и ротор индуктора

Рулевой привод
Рулевой привод в каждом канале СУР выполнен в виде единого рулевого агрегата и состоит из газового распределителя г силового цилиндра. Привод ПГ-11 отличается от привода ПГ-10 лишь тяговым усилием на штоке.
Газовый распределитель состоит из газового тракта и электромагнитной системы (рис. 2.4). Газовый тракт включает в себя входной фланец 4, ниппель 3, сопло I, закрепленное на оси ротора 2, и приемник 9, через отверстия которого газ попадает в полости силового цилиндра.
Электромагнитная система конструктивным исполнением корпуса 5 отделена от газового тракта и состоит из двух постоянных магнитов, магнитопровода 6 и ротора 7, размещенного во внутренних окнах двух катушек 8.
Силовой цилиндр - полый цилиндр 10 из алюминиевого сплава, внутри которого перемещается поршень 15, закрепленный на трубке 14. Внутри трубки шарнирно поворачивается штанга 13. Цилиндр с одной стороны закрыт крышкой 16, на которой расположены выключатель 18 и потенциометр 21. Электрическая часть закрыта кожухом 19. Выключатель выполнен из бронзового стержня с посеребренной рабочей поверхностью, заармированный в пресс-материал.
Для съема электрического сигнала служат контактные пластины 20, закрепленные на токосъемнике 17. Уплотнение всех подвижных соединений в силовом цилиндре создается резиновыми манжетами II. На конце штанги, выходящей из цилиндра, установлена вилка 12. Выход электрических цепей оформлен жгутом (на рис. 2.4 не показано). Корпус силового цилиндра крепят неподвижно на плате ракеты с помощью резьбового соединения.
Сжатый воздух под давлением 1,4 МПа, выходящий из струйной трубки I, распределяется между двумя входными отверстиями приемника 9. Области перекрытия выходного отверстия струйной трубки с входными отверстиями каналов цилиндра образуют входные дроссели S11 и S12 , а незатененные струйной трубкой площади приемных окон - выходные дроссели S21 и S22. Рассмотрим работу привода, функциональная схема которого приведена на рис. 2.5.
При отсутствии электрического сигнала с усилителя мощности (УМ) магнитный поток, создаваемый обмотками катушек 13, равен нулю. Создаваемые постоянными магнитами 2 потоки подмагничивания, замыкаясь, через концевые части ротора I устанавливают его в положение максимальной проводимости, т.е. в среднее положение ((р)=0). Другими словами, ротор удерживается в среднем положении магнитной пружиной, создаваемой постоянными магнитами. Струйная трубка 4 жестко закреплена на оси 3 ротора, поэтому угол поворота струйной трубки тоже равен нулю ((тр)=0). В этом случае равны площади входных дросселей (S11 = S12 ) и площади выходных дросселей (S21 и S22). Следовательно, через входные дроссели в полости I и II цилиндра поступают в единицу времени одинаковые количества сжатого воздуха, а через выходные дроссели из этих полостей выходят в единицу времени одинаковые количества сжатого воздуха. Поэтому давления воздуха p1 и р2 в полостях равны (р1=p2). На поршень 8, разделяющий цилиндр, действуют с противоположных сторон одинаковые силы давления воздуха, поэтому поршень неподвижен.
При наличии сигнала с усилителя мощности u(оу)0 в катушках 13 создаются магнитные потоки, направленные в одну сторону, так как они подключены параллельно. Магнитные потоки складываются с магнитными потоками постоянных магнитов 2 в одной части зазора и вычитаются в другой. В результате создается электромагнитный момент, под действием которого ротор начинает поворачиваться. При равенстве момента, создаваемого катушками ротора, моменту сопротивления магнитной пружины, поворот ротора прекратится. Угол поворота ротора будет пропорционален управляющему сигналу u(оу).
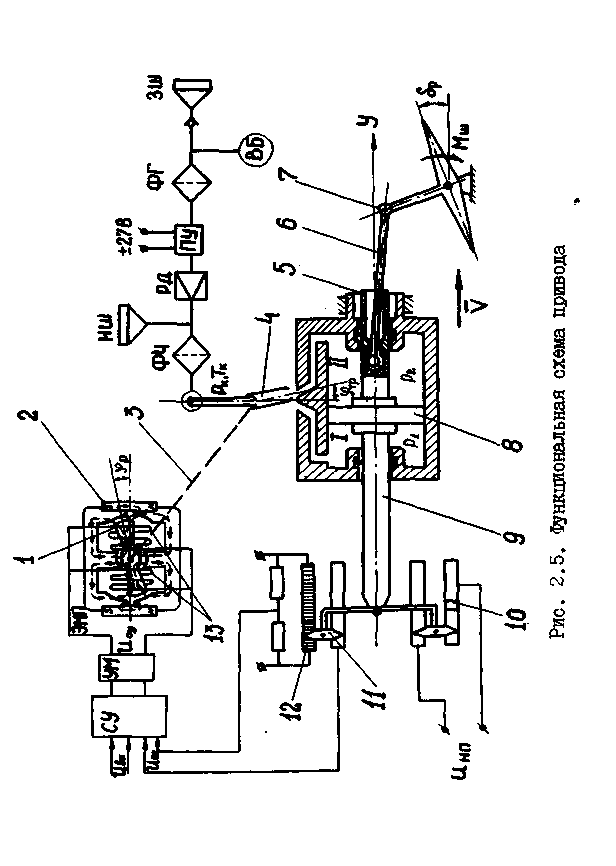
Перемещение поршня через трубку 5, штангу 6, вилку 7 вызывает отклонение рулей (ПГ-11) или элеронов (ПГ-10). Движение штока 9 приводит к размыканию цепи выключателя 10, сигнализирующего о нейтральном положении руля (U(нп)), а также к движению токосъемника II по потенциометру 12. Сигнал с потенциометра u(ос) ос подается на вход суммирующего усилителя (СУ) в полярности противоположной к входному. Шток будет перемещаться, пока сигнал с потенциометра не скомпенсирует входной сигнал (u(ос)= u(вх)). В этом случае выходной сигнал с усилителя мощности становится равным нулю (u(оу) = 0). Ротор электромеханического преобразователя вместе со струйной трубкой возвращаются в нейтральное положение ((р)=(тр)= 0). Давление в полостях цилиндра выравнивается (р1=р2) и поршень останавливается. Перемещение руля будет пропорциональным управляющему сигналу u(вх), подаваемому из системы управления ракетой.
При наличии шарнирного момента (Мш 0), что имеет место при отклонении руля в реальном полете ракеты, привод работает так же, как описано выше. Однако в этом случае в процессе движения поршня от среднего положения на него будет действовать сила сопротивления, пропорциональная шарнирному моменту руля. Следовательно, поршень остановится тогда, когда сила, развиваемая поршнем за счет разности давлений р1-р2 полостях цилиндра, станет равной силе сопротивления, создаваемой шарнирным моментом на руле. Ротор и струйная трубка установятся от нейтрального положения под углом , пропорциональным сигналу с усилителя мощности u(оу)=u(вх)-u(ос)