

1.2. Системы наведения ракет
Лазерная полуактивная система наведения
На самолете устанавливается лазерная станция подсвета цели (ЛСПЦ), основным элементом которой является оптический квантовый генератор. Летчик, выполняя прицеливание, наводит подвижную марку (перекрестие) оптико-прицельной системы (ОПС) на цель и удерживает ее на ней в течение всего времени атаки. С помощью следящей системы целеуказание от визирного устройства ОПС передается одновременно на подвижное зеркало ЛСПЦ, направляя лазерный луч на цель, и на ЛГСН ракеты, подвешенной на этом же самолете, для поворота координатора на цель. После захвата ЛГСН сигнала, отраженного от цели, производится пуск ракеты. Ракета наводится на пятно лазерного луча, при этом осуществляется программный маневр в вертикальной плоскости (вертикальная горка (ВГ)). По решению летчика маневр ВГ может быть отключен перед пуском ракеты.
Типовая траектория ракеты в вертикальной плоскости показана на рис. 1.2. Она формируется законом управления, который для повышения боевой эффективности обеспечивает подход ракеты к цели под углами свыше 15° к горизонту. Траектория имеет четыре характерных участка.

Рис. 1.2. Типовая траектория ракет МЛ, МП
После отделения ракеты в течение секунды осуществляется отработка стартовых возмущений и стабилизация ракеты относительно центра масс. Траектория полета ракеты имеет характер, близкий к прямолинейному (участок I).
В момент t (упр) (участок II) в систему управления ракетой подается сигнал (в.зад) = -27°, которым создается вертикальный маневр-кабрирование. При выполнении условия
tзадt
где задt определяется путем интегрирования постоянного сигнала угловой скорости визирования (в.зад)=const в системе управления снимается сигнал (в.зад)=-27° и ракета переходит в режим разворота на пикирование (участок III). Длительность участка III около 2 с.
При достижении условия (в) = -1° (участок IV) включается режим ближнего самонаведения (t(бс)). который продолжается до встречи ракеты с целью. Управление ракетой на этом участке осуществляется по сигналам головки самонаведения: угловой скорости линии- визирования и угла пеленга цели.
Следует отметить, что хотя ручной или полуавтоматический подсвет цели должен продолжаться до конца наведения ракет, носитель имеет возможность маневрировать в пределах углов отклонения системы целеуказания, чтобы уменьшить вероятность его поражения средствами ПВО атакуемого объекта.
Радиолокационная пассивная система наведения
Пассивная радиолокационная ГСН ракеты захватывает излучение РЛС на подвеске в диапазоне частот, заданном перед вылетом по предварительным данным радиоразведки. Поиск по углу осуществляется либо обзорным режимом работы пассивной РГС - прокачкой подвижной антенны в заданном диапазоне углов по тангажу и курсу, либо расширением поля зрения пассивной РГС с неподвижной антенной (что менее эффективно). После обнаружения и захвата цели пеленг передается в вычислитель носителя, где определяется дальность до цели. Когда текущая дальность станет меньше баллистической дальности полета ракеты при данных условиях полета носителя (введенных в вычислитель высоты и скорости полета), дается разрешение на пуск ракеты.
После пуска самолет-носитель может совершать маневр ухода от цели, а ракета автономно наводится на цель. При этом осуществляется программный маневр ракеты в вертикальной плоскости ("горка"), увеличивающий дальность полета и повышающий эффективность поражения цели из-за увеличения углов подхода (13... 60°). Типовая траектория полета ракеты в вертикальной плоскости такая же, как и у ракеты МЛ (рис. 1.2). Отличие лишь в длительности второго участка, так как при пуске с больших дальностей угловая скорость линии визирования (в.) мала и угол t растет медленно, поэтому» если условие (I.I) не выполняется в течение 9 с, то угол t принимается постоянным и равным минус 27°. Дальность пуска при этом достигает 30...40 км.
Радиокомандная система наведения
Наведение ракеты на цель производится по методу трех точек. При этом методе ракета постоянно удерживается на линии носитель-цель, тем самым выполняется равенство углов визирования цели и ракеты. Существуют две системы радиокомандного наведения; ручная и полуавтоматическая [3]. Наиболее простая - ручная - не требует для наведения прицельно-визирных устройств.
В состав системы входят рукоятка управления и передатчик команд (на носителе), приемник команд и автопилот (на ракете). На одноместном самолете команды формирует летчик, пользуясь книппелем - кнопкой на рукоятке управления самолетом. Кнопка имеет две степени свободы: летчик может перемещать ее вверх-вниз и вправо-влево. Перемещение кнопки фиксируется потенциометрами или тензодатчиками, сигнал которых и является первичной командой. Выработанная команда поступает в передатчик, где она фильтруется, зашифровывается и в виде кода передается через направленную антенну на ракету. Приемник ракеты принимает команды, дешифрует их и подает на вход автопилота, с помощью которого команды отрабатываются ракетой. Задача оператора (летчика) - передавать команды управления на ракету, удерживающие ее на линии самолет-цель. Это достигается, если оператор видит ракету все время совмещенной с целью. Чтобы оператор без затруднений мог видеть удаляющуюся ракету и ее реакцию на управление, на ней устанавливают трассер, который воспламеняется после старта и ярко горит, обеспечивая хорошую видимость ракеты на всей траектории ее полета.
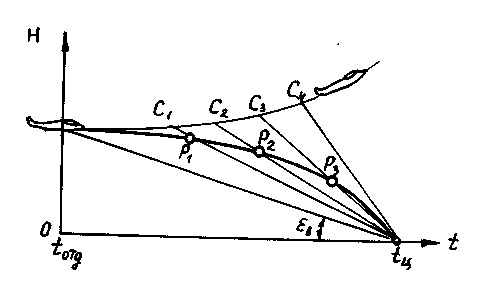
Рис. 1.3. Типовая траектория МР: С1, С2 ,С3,С4 - траектория самолета;
p1, p2, р3 - траектория ракеты
После пуска ракеты в процессе ее наведения самолет может пикировать на цель следом за ракетой, продолжать горизонтальный полет или маневрировать таким образом, чтобы оператор не терял из поля зрения ракету и цель, а ракета, находящаяся на линии визирования цели, не выходила за пределы диаграммы направленности передатчика радиокоманд. Типовая траектория ракеты в вертикальной плоскости показана на рис. 1.3.