

1.1.2. Структурный анализ рычажных механизмов
Структура, т. е. строение механизмов, имеет очень большое значение как при синтезе механизма, помогая наиболее рационально сконструировать его для осуществления требуемого движения выходного звена, так и при анализе механизмов для выбора соответствующих методов исследования.
Одной из распространенных классификаций плоских рычажных механизмов с парами пятого класса является структурная классификация Ассура-Артоболевского, в основу которой положены структурные особенности отдельных групп механизмов, определяющие методы кинематического и силового расчета механизмов. Согласно этой классификации механизмы объединяют в классы. Механизм первого класса состоит из входного звена: кривошипа (или ползуна) и стойки, соединенных кинематической парой пятого класса (рис. 1.5). Степень подвижности механизма первого класса W = 1. Это механизмы роторных приборов (гироскопов, электродвигателей и генераторов), поршневых машин и др. Механизмы более высоких классов образуют последовательным присоединением к начальному механизму кинематических цепей, не изменяющих степень подвижности исходного механизма, т. е. имеющих степень подвижности, равную нулю.
Кинематическая цепь, которая, будучи присоединенной свободными элементами пар к стойке, обладает нулевой степенью подвижности, называется структурной группой Ассура. Условие существования группы:
W = 3n – 2p5 = 0,
откуда p5 = 3n / 2. (1.4)
Так как число звеньев n и число кинематических пар p5 могут быть только целыми, то условию (1.4) удовлетворяют кинематические цепи, состоящие из четного числа звеньев и кратному трем числа кинематических пар. Простейшая из них имеет два звена и три кинематические пары.
Структурные группы подразделяют на классы и порядки. Группа II класса состоит из двух звеньев и трех кинематических пар. Свободные элементы звеньев (поводки) предназначены для присоединения группы к другим звеньям механизма. Звенья этой группы могут образовывать с другими звеньями механизма вращательные или поступательные пары. На рис. 1.6 показано 5 видов (модификация) групп II класса 2-го порядка, получаемых путем замены вращательных пар (В) на поступательные (П).
Структурные группы более высоких классов получают путем добавления к простой группе двух звеньев и трех кинематических пар (рис. 1.7).
Порядок группы определяется числом свободных элементов (поводков), которыми группа может быть присоединена к другим звеньям.
|
|
Рис. 1.5. Механизмы первого класса |
Рис. 1.6. Структурные группы II класса 2-го порядка |

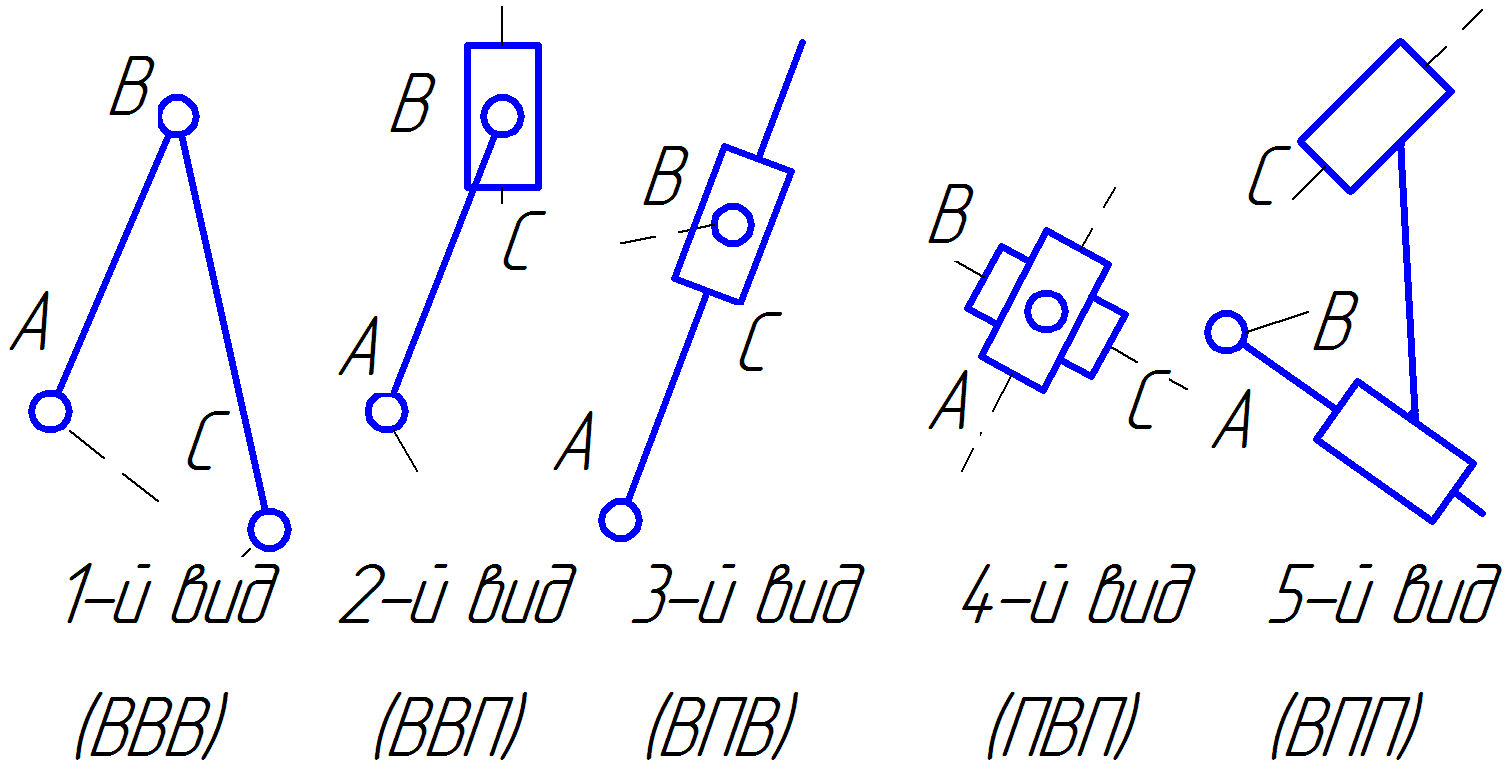

Рис. 1.7. Структурные группы 3-го и 4-го классов
Класс и порядок механизма в целом определяется классом и порядком наиболее сложной структурной группы, входящей в него.
Контрольные вопросы
1. Что такое машина?
2. В чем отличие машины от прибора?
3. Что называется звеном?
4. В чем отличие звена от детали?
5. Что называется кинематической парой?
6. По каким признакам классифицируют кинематические пары?
7. В чем состоит отличие механизма от кинематической цепи?
8. Как определить степень подвижности кинематической цепи?
9. Что называется структурной группой Ассура?
10. Что такое пассивные связи и лишние степени свободы?