

Б) в плоской
W = 3n – 2p5 – p4. (1.3)
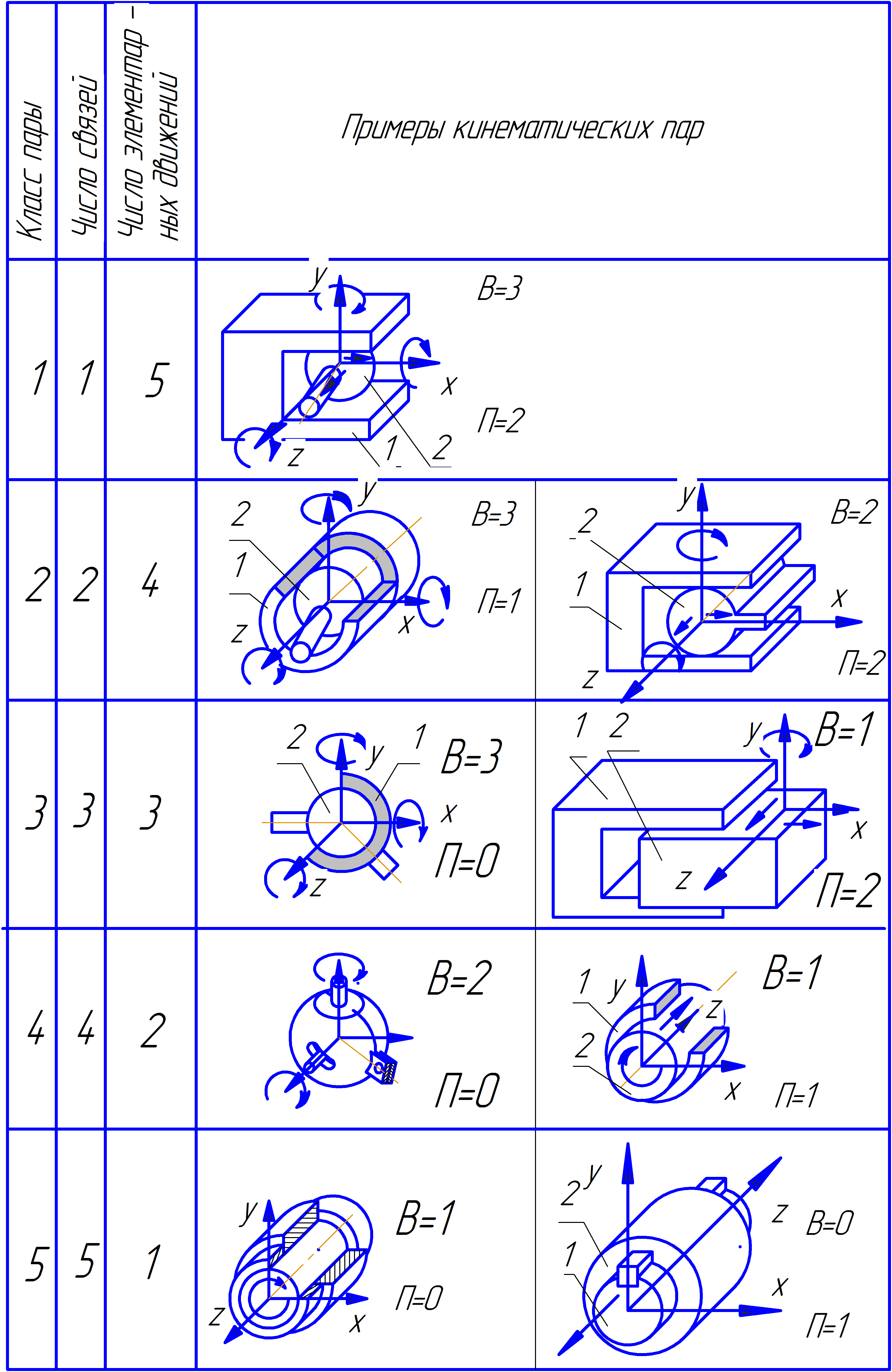
Рис. 1.1. Классификация кинематических пар
Если все независимые движения реализовать с помощью двигателей (входных звеньев), то все звенья цепи будут двигаться определенно: для выбранного момента времени можно определить положение, скорость и ускорение любого звена. Таким образом, координаты входных звеньев (линейные и угловые) определяют положение всех звеньев цепи.
Для практических целей необходимо получить закон движения выходных звеньев. Это реализуется с помощью механизма. Механизмом называют кинематическую цепь, у которой при заданном движении одного или нескольких звеньев относительно стойки остальные звенья совершают вполне определенные заданные движения. Степень подвижности W механизма равна количеству входных звеньев.
Если W = 0, то движение звеньев в такой системе невозможно и кинематическая цепь не может быть механизмом, а представляет жесткую систему – ферму.
В некоторых механизмах могут встретиться степени свободы и связи, которые не оказывают влияния на движение выходных звеньев механизма в целом, а определяют только характер движения отдельных его звеньев. Эти степени свободы называют лишними степенями свободы, а связи – пассивными связями. При структурном анализе схемы механизма лишние степени свободы и пассивные связи не учитываются.
Например, механизм двойного параллелограмма (рис. 1.2, а) имеет n = 4; р5 = 6; р4 = 0. Следовательно, W = 34-26 = 0, т.е. движение звеньев механизма невозможно. В действительности при ОА=ВС; АВ=ОС; DЕ=АВ – это механизм с одной степенью свободы. Если удалить звено 4 с кинематическими парами D и Е, то движение остальных звеньев не изменится.
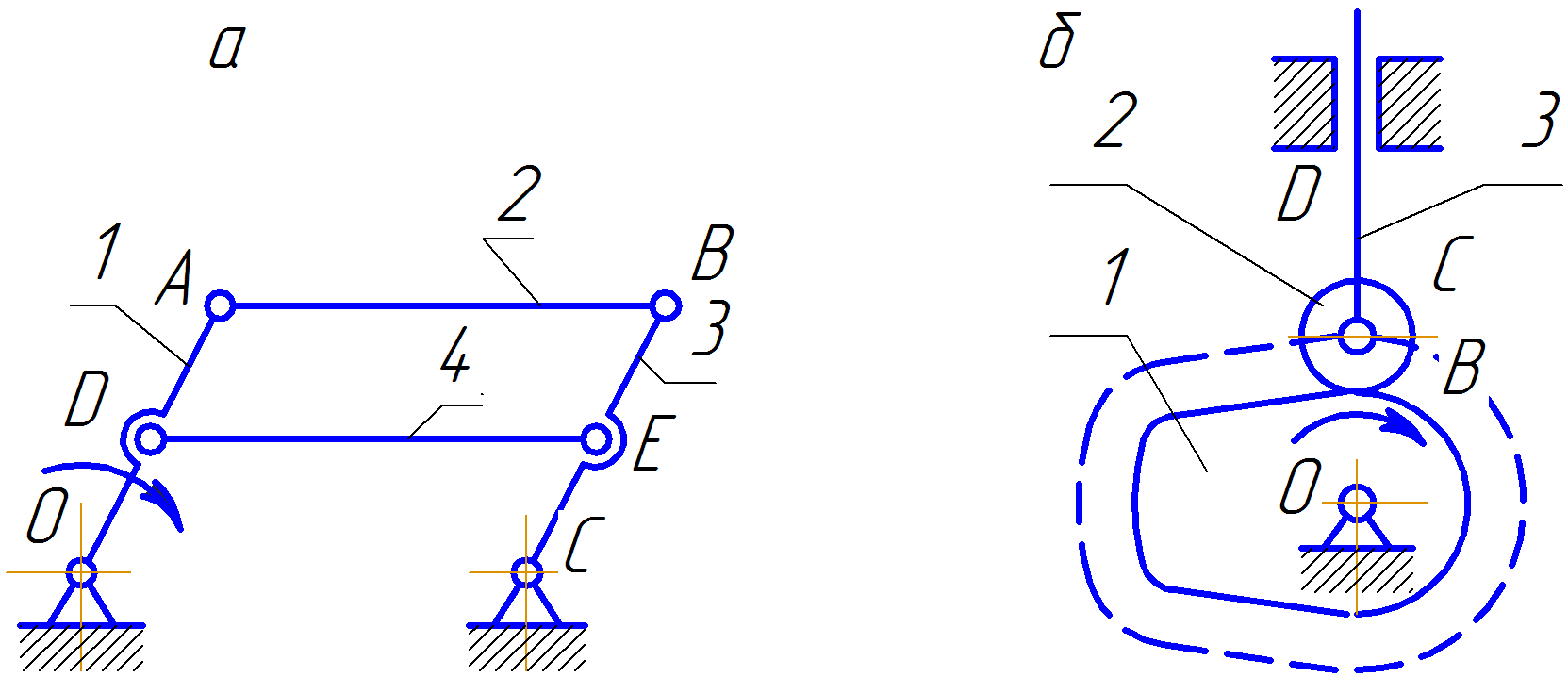
Рис. 1.2. Механизмы с пассивными связями и лишними степенями свободы
На рис. 1.2, б изображен кулачковый механизм, в котором толкатель 3 для уменьшения износа кулачка 1 снабжен круглым роликом 2. Степень подвижности W = 3 3 – 2 3 – 1 = 2. Работа механизма не изменится, если круглый ролик удалить, а профиль кулачка выполнить по эквидистанте (показана штриховой линией).
1.1.1. Классификация механизмов
С целью разработки общих методов проектирования и расчета механизмы классифицируют по разным принципам: характеру движения – плоские и пространственные; виду кинематических пар – механизмы с высшими и низшими парами; назначению; принципу передачи усилий – механизмы передачи движения за счет сил трения или зацепления; по конструктивным признакам – шарнирно-рычажные, кулачковые, фрикционные, зубчатые, червячные, механизмы с гибкой связью и др.
Рычажными называют механизмы с геометрическим замыканием звеньев, которые не содержат кинематических пар четвертого класса (рис. 1.3). Они могут передавать большие усилия и мощности по сравнению с другими механизмами в аналогичных условиях. Такие механизмы применяют в основном для преобразования вращательных или поступательных движений входных звеньев в качательное или возвратно-поступательное движение выходных звеньях.
В зависимости от характера движения и назначения звенья имеют определенные названия. Звено, совершающее полный оборот вокруг неподвижной оси – кривошип; плоскопараллельное движение имеет шатун; качательное – коромысло; поступательное – ползун; направляющая – неподвижное звено, образующее поступательную пару с ползуном; коромысло, служащее направляющей для ползуна (кулисного камня) – кулиса и др.
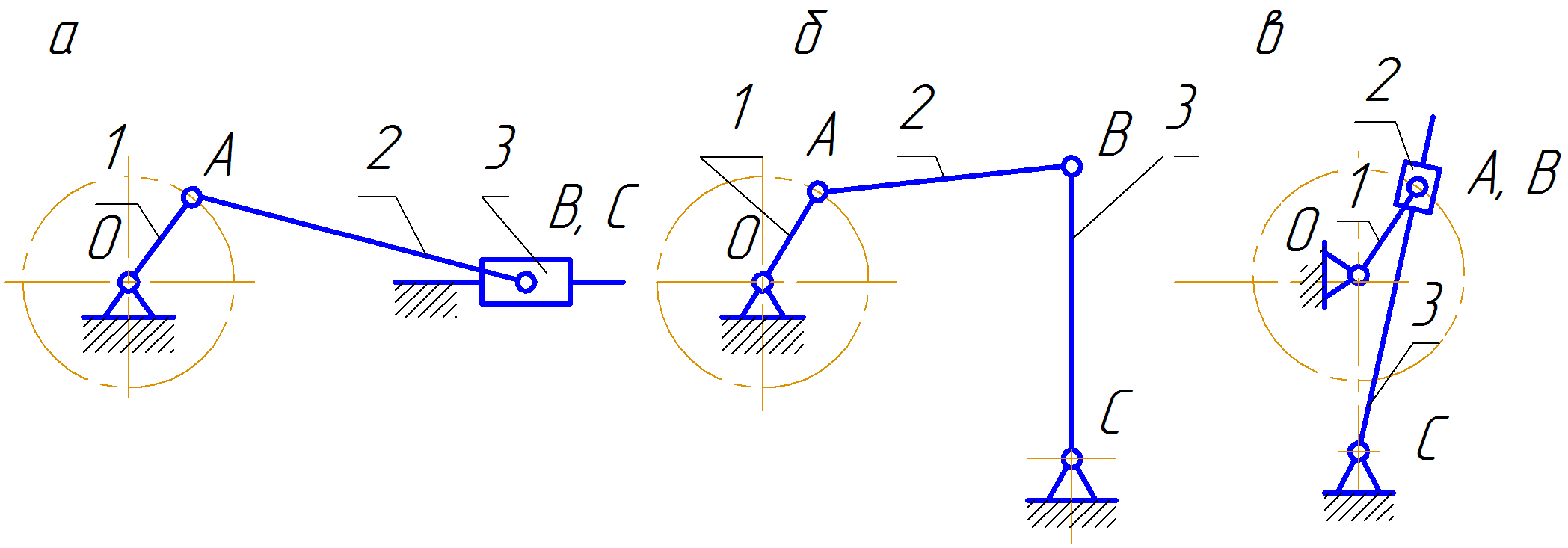
Рис. 1.3. Рычажные механизмы
Кулачковые механизмы (рис. 1.4, а, б и в) – механизмы с высшими кинематическими парами, которые образуются путем силового и геометрического замыкания его звеньев: кулачка и толкателя; кулачка и коромысла. Эти механизмы используются для преобразования вращательного движения входного звена в возвратно-поступательное или качательное движение выходного с остановками заданной продолжительности.
Фрикционные механизмы (рис. 1.4, г) служат для передачи движения за счет сил трения, возникающих в результате контакта звеньев. Фрикционный механизм может быть выполнен с гибкими звеньями. Его применяют для передачи вращения между валами при больших межосевых расстояниях при помощи гибкой связи: ремня.
Зубчатые механизмы (рис. 1.4, д и е) образованы с помощью зубчатых колес – дисков, с нарезанными на ободе зубьями. Передача нагрузки между колесами осуществляется за счет силового воздействия зубьев друг на друга – силового замыкания. Их конструкция позволяет передать движение между параллельными, пересекающимися и перекрещивающимися осями с постоянным или переменным отношением угловых скоростей. Меньшее из зубчатых колес называют шестерней.

Рис. 1.4. Механизмы с высшими кинематическими парами