

Вектора
Информационный текст
Вектор как единое, фундаментальное понятие в физике и математике
При изучении школьных курсов физики и математики встречаются с различными трактовками понятия вектора, например такими:
вектор как направленный отрезок;
вектор как класс эквивалентных направленных отрезков;
вектор как параллельный перенос [2; 14].
Во всех этих подходах уделяется внимание лишь геометрическому подходу к векторному исчислению, рассматриваются действия над "геометрическими" векторами, что приводит к не правильному пониманию существа понятия вектора.
Рассматривается возможность формирования общего понятия вектора с тем, чтобы содержание этого понятия включало в явном виде те физические и математические его интерпретации, с которыми придется иметь дело при дальнейшем образовании.
Для формирования такого общего представления мы использовали понятие вектора как элемента векторного пространства. Понятие векторного пространства является одним из фундаментальных понятий современных математики и физики. Например, трехмерное векторное пространство является объектом изучения аналитической геометрии, векторное пространство произвольной размерности изучается в линейной алгебре. Понятие бесконечномерного векторного пространства играет фундаментальную роль в современном анализе, а конечномерные векторные пространства широко используются в теории функций многих переменных.
Векторный аппарат широко используется в физике. Он применяется, в классической и релятивистской механике, теории поля. Понятие бесконечномерного векторного пространства играет фундаментальную роль в квантовой механике. Вводя неевклидову метрику, то есть существование таких векторов, квадрат которых меньше нуля, приходим к понятию псевдоевклидова пространства Минковского, которое применяется в специальной теории относительности Эйнштейна. Если рассматривать ненулевой вектор, квадрат которого равен нулю, то придём к понятию полуевклидова пространства, которое связано с классической механикой Ньютона [123; 131].
Таким образом, понятие векторного пространства широко применяется как в математике, так и в физике. Причем в приложениях векторного аппарата в различных областях науки используются различные интерпретации векторного пространства.
Целесообразно обобщить знания о различных примерах векторов, которые использовались в физике.
Известно, что в физике рассматриваются различные виды векторов:
Свободные - такие векторы, которые можно переносить в любую точку пространства параллельно самим себе. Примерами таких векторов являются; вектор скорости поступательного движения тела, вектор ускорения, вектор момента силы, вектор магнитной индукции постоянного магнитного поля.
Скользящие – такие векторы, которые можно переносить только по линии их действия. Их примерами являются: вектор силы, приложенной к абсолютно твёрдому телу, вектор углового ускорения.
Связанные - такие векторы, которые связаны с определённой точкой своего приложения. Например: вектор мгновенной скорости точки, вектор напряженности неоднородных электрических и магнитных полей.
Актуализируя знания учащихся о векторах скорости поступательного движения, ускорения, мгновенной скорости, силы, приложенной к абсолютно твердому телу, выделяем их общие свойства. В данном случае нас будут интересовать свойства сложения этих векторов и умножения на число. Особое внимание следует уделить свойствам сложения векторов: переместительному; сочетательному, существованию нулевого и противоположного вектора; и умножения вектора на число: сочетательному, двум распределительным, умножению на единицу.
В процессе решения
задач замечают, что все известные
векторы из курса физики обладают
одинаковыми свойствами сложения и
умножения на число. Целесообразно
объединить выделенные свойства в
таблицу. Рассмотрим на примере сил,
приложенных к абсолютно твёрдому телу.
![]() и
и
![]() .
Для определения равнодействующей
силы
.
Для определения равнодействующей
силы
![]()
1. Сложение: + = |
2. Умножение на число: k = . |
Переместительное свойство: + = + . |
Псиное распределительное свойство:
(k+n) •
|
Сочетательное свойство: +( + ) = ( + )+ . |
Второе распределительное свойство: k• ( + ) = k• +k• . |
Существование нулевой силы
+ = |
Сочетательное свойство: (к • n) • =к • (n • ). |
Существование для любой силы ей противоположной + (- ) = . |
Умножение на единицу: 1 • = . |
, , силы, приложенные к абсолютно твердому телу, к, n - числа. |
|
Проиллюстрировать сложение векторов и умножение вектора на число можно на следующих физических примерах.
П ример
1. Тело
движется по наклонной плоскости под
действием силы тяжести, трение отсутствует
(рис.1). Результирующая сил m
ример
1. Тело
движется по наклонной плоскости под
действием силы тяжести, трение отсутствует
(рис.1). Результирующая сил m![]() и
и
![]() ,
действующих на тело, равна
= m
+
.
Направление ускорения совпадает с
направлением силы
.
,
действующих на тело, равна
= m
+
.
Направление ускорения совпадает с
направлением силы
.
Пример 2.
В физике различают умножение вектора
на число и скалярную величину. В
первом случае получается вектор того
же смысла, во втором - новый вектор.
Например, в случае умножения вектора
скорости
![]() ,
на число 4 получаем вектор скорости
4
.
В случае умножения вектора скорости
на скалярную величину массу m,
получаем новую физическую векторную
величину - импульс
,
на число 4 получаем вектор скорости
4
.
В случае умножения вектора скорости
на скалярную величину массу m,
получаем новую физическую векторную
величину - импульс
![]() .
.
Пример 3. К телу в точке А приложена сила . Требуется найти момент данной силы , вращающей тело относительно данной точки О.
Решение.
Модуль момента силы
![]() равен произведению модуля силы на длину
плеча: |
|
= |
|
равен произведению модуля силы на длину
плеча: |
|
= |
|![]() h,
где h
- кратчайшее расстояние от центра
вращения до линии действия силы, т.е.
модуль этого вектора |
|
равен удвоенной площади треугольника
ОАВ или произведению модуля силы
на расстояние h от центра О до линии
действия силы, т. е. |
|
= Fh.
h,
где h
- кратчайшее расстояние от центра
вращения до линии действия силы, т.е.
модуль этого вектора |
|
равен удвоенной площади треугольника
ОАВ или произведению модуля силы
на расстояние h от центра О до линии
действия силы, т. е. |
|
= Fh.
Расстояние h называют также плечом силы.
Из рисунка
непосредственно видно, что h = |![]() |sin
|sin![]() .
.
Следовательно, | | = | || |sin .
Поэтому
=
![]() ,
,
П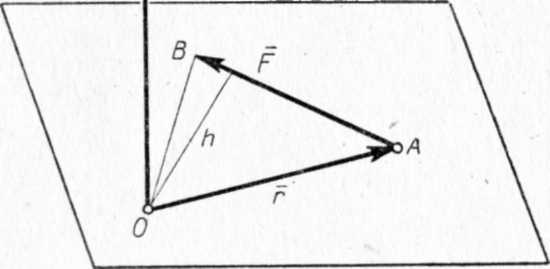 оэтому
в механике принято понятие момента силы
относительного центра следующим образом.
Если сила
(рис.) приложена к материальной точке
А, то моментом силы относительно центра
О называется вектор, приложенный к
центру О, определяемый формулой
оэтому
в механике принято понятие момента силы
относительного центра следующим образом.
Если сила
(рис.) приложена к материальной точке
А, то моментом силы относительно центра
О называется вектор, приложенный к
центру О, определяемый формулой
= ,
где
=
![]() — радиус-вектор точки приложения силы
.
— радиус-вектор точки приложения силы
.
Если сила измеряется в кГ, а плечо в м, то размерность вектора будет кГ• м, т. е. момент силы измеряется в килограммометрах.
Полученная формула одновременно с величиной момента силы позволяет укатать направление оси вращения и направление вращения самого тела. В этом ещё раз проявляется необходимость введения математического понятия векторного произведения в курсе физики.
Ещё одним примером использования векторного произведения в физике является определение вектора момента импульса тела относительно точки, в частности, момента импульса планеты.
Пример 4.  Возможны
два случая: шар катится ни часовой
стрелке и против часовой стрелки.
Возможны
два случая: шар катится ни часовой
стрелке и против часовой стрелки.
В первом случае,
определяя направление угловых скоростей
по правилу правого винтa, имеем:
![]() ,
где
,
где
![]()
вектор полной угловой скорости.
Во втором случае
 аналогично:
.
аналогично:
.
Следовательно,
![]() ,
так как в обоих случаях векторы
,
так как в обоих случаях векторы![]() перпендикулярны.
перпендикулярны.
![]() =3,75с
=3,75с![]() ,
,
![]() =
2с
,
=
2с
,
![]() =
4,75с
,
Угол наклона полной угловой скорости
к горизонту в первом и во втором случае
одинаков и находится из векторного
треугольника (рис.7 и рис.8). sin
=
4,75с
,
Угол наклона полной угловой скорости
к горизонту в первом и во втором случае
одинаков и находится из векторного
треугольника (рис.7 и рис.8). sin![]() =
=
![]() = 0.471,
= 0.471,
![]() 72
72![]() .
.
На наш взгляд, рассмотрение векторного пространства, как общего понятия физики и математики целесообразно закончить рассмотрением понятия векторного или силового поля, как физической интерпретации математического понятия векторного пространства. При таком подходе с каждой точкой поля связывается вектор силы соответствующей природы. При попадании материальной точки в определенную точку поля действует данная сила.
В школьном курсе примеры векторных полей, например гравитационное и электростатическое, изучаются в разных классах и разных разделах, поэтому у учащихся не формируется понятие родственности данных полей. В связи с этим целесообразно рассмотреть все силовые поля, изученные к данному моменту на уроках физики (гравитационное, электростатическое, магнитное, электромагнитное), в едином блоке силовых полей, что позволит глубже раскрыть свойства из этих полей.
Сначала сравниваются гравитационное и электростатическое поля. Результат сопоставления основных характеристик и свойств этих полей оформляется в виде таблицы
Основные характеристики |
Гравитационное поле |
Электростатическое поле |
Носители |
Материальные тела |
Заряженные тела |
Сила |
=
G |
=
k |
Напряженность |
|
= |
Потенциал |
=
|
=
|
Интересно рассмотреть с учащимися связь напряженности и потенциала как однородного поля (напряженность одинакова во всех точках), и неоднородного.
Физические понятия как основа решения геометрических задач
Интересным в этом плане является знакомство с применением физических понятий к решению геометрических задач.
Подобный путь решения чисто математических проблем имел место на протяжении всей истории развития науки математики. Ещё до нашей эры великий древнегреческий мыслитель Архимед обнаружил возможность доказывать новые математические факты "механическим" методом с использованием принципа рычага. В частности, этим способом им была установлена теорема о том, что: Три медианы треугольника пересекаются в одной точке и делятся ею в отношении 2:1. При доказательстве используются следующие вопросы:
материальная точка;
центр масс двух материальных точек:
центр масс системы материальных точек;
свойства центра масс;
теорема Архимеда о медианах треугольника.
Теорема Архимеда
Три медианы тpeугольника имеют общую точку, и каждая из медиан делится этой точкой в отношении 2: 1, считая от вершины.
Доказательство (предложенное Архимедом).
Пусть AВC - данный
треугольник. AM, CP, ВК - его медианы
(рис.11). Поместим в вершины треугольника
равные массы, например, по 1грамму.
Получившаяся система трёх материальных
точек 1A, 1В, 1С имеет однозначно определённый
центр масс в некоторой точке О
(существование и единственности центра
масс). В силу свойства о перегруппировке
центров масс положение центра масс не
изменится, если массы материальных
точек 1B и 1С перенести в их центр масс,
то есть, согласно правилу рычага, в
точку М. Но тогда точка О окажется центром
масс лишь двух материальных точек 2М и
1А. Значит. О![]() [АМ]. Аналогично убеждаемся в том. что
О
[ВК] и O
[CP].
Таким образом все медианы имеют общую
точку О. Кроме того, по правилу рычага
имеем 2
ОМ=1
ОА,
или OA :ОМ = 2:1. Теорема доказана.
[АМ]. Аналогично убеждаемся в том. что
О
[ВК] и O
[CP].
Таким образом все медианы имеют общую
точку О. Кроме того, по правилу рычага
имеем 2
ОМ=1
ОА,
или OA :ОМ = 2:1. Теорема доказана.
Разумеется, для того, чтобы получать математически строгие решения геометрических задач, все сформулированные положения, апеллирующие к понятиям механики, должны быть математически обоснованы.
Пример 1. Сила = {1; 3; 2} приложена в точке В (3; 4; 5). Найти момент силы относительно точки А (1; 2; 3).
Пример 2. Момент сил, действующих на диполь. Момент сил, действующих на диполь (рис. 1.16, б) в однородном внешнем электрическом поле, определяется в физике, электротехнике с помощью векторного произведения следующим образом:
![]() =
=
![]() ,
|
|
= |
||
|sin
,
,
|
|
= |
||
|sin
,
 где
= q
где
= q![]() — вектор электрического момента диполя,
вектор
=
— вектор электрического момента диполя,
вектор
=
![]() направлен от отрицательного к
положительному заряду диполя,
— вектор напряженности электрического
поля. Этот момент можно записать и иначе,
в соответствии с его механическим
смыслом, как момент пары сил
направлен от отрицательного к
положительному заряду диполя,
— вектор напряженности электрического
поля. Этот момент можно записать и иначе,
в соответствии с его механическим
смыслом, как момент пары сил
![]() и
и
![]() взаимодействия точечных зарядов q
взаимодействия точечных зарядов q![]() и q
и q![]() с внешним электрическим полем
=
с внешним электрическим полем
=
![]() ,
где к = 1,2.
,
где к = 1,2.
Вектор
направлен к точке приложения силы
= q![]() ,
где q
— заряд со своим знаком.
,
где q
— заряд со своим знаком.
Сила, действующая на проводник с током в магнитном поле.
Эта сила равна
![]() = I(
= I(
![]() )
или
)
или
![]() =
/c
=
/c![]() ,
,
где с —
электродинамическая постоянная,
![]() — вектор силы тока, протекающего в
проводнике,
— вектор напряженности магнитного
поля, в котором движется проводник,
— сила, действующая на проводник длиной
— вектор силы тока, протекающего в
проводнике,
— вектор напряженности магнитного
поля, в котором движется проводник,
— сила, действующая на проводник длиной
![]() (направление вектора
совпадает с направлением тока),
—
сила, действующая на проводник единичной
длины (рис. 1.17).
(направление вектора
совпадает с направлением тока),
—
сила, действующая на проводник единичной
длины (рис. 1.17).
Некоторые характеристики электромагнитных полей. В процессе исследования закономерностей распространения электромагнитных волн в однородной изотропной среде можно с помощью векторного произведения определить такие векторные величины, как скорость распространения волны: = , где
и
- векторы напряженностей соответственно
электрического и магнитного полей;
вектор плотности потока энергии,
переносимой полем (вектор Пойнтинга):
=
![]() (
)
=
,
(
)
=
,
где с — скорость распространения электромагнитных волн в пустоте (рис. 1.18, б). Формула справедлива в смешанной или гауссовой системе единиц.
Скорость
произвольной точки вращающегося тела.
Если тело вращается относительно
неподвижной точки О (рис. 1.19),то в любой
момент времени вектор
угловой скорости вращения совпадает
по направлению с мгновенной осью вращения
и,
проходящей через неподвижную точку
О. В этом случае линейную скорость
произвольной точки М тела, расположенной
вне оси и,
можно определить с помощью векторного
произведения векторов
и
![]() :
:
![]() =
,
|
|=
|
|
|
|sin
.
=
,
|
|=
|
|
|
|sin
.
Г ироскопические
эффекты.
Гироскопом называется осесимметричное
твердое тело, вращающееся относительно
своей единственной неподвижной точки
О, расположенной на оси симметрии (рис.
1.20, а). Вращательное движение относительно
неподвижной точки можно представить в
виде суммы трех независимых друг от
друга движений-вращений относительно
трех пересекающихся в неподвижной точке
осей. Гироскоп, обладающий этими тремя
движениями (тремя степенями свободы),
называется т р е х с т е п е н н ы м или
свобод н ы м. Он обладает замечательным
свойством: если момент М
всех внешних сил, действующих на его
ротор, относительно неподвижной точки
О равен нулю, то гироскоп сохраняет в
пространстве положение оси собственного
вращения (оси симметрии, или собственной
оси).
ироскопические
эффекты.
Гироскопом называется осесимметричное
твердое тело, вращающееся относительно
своей единственной неподвижной точки
О, расположенной на оси симметрии (рис.
1.20, а). Вращательное движение относительно
неподвижной точки можно представить в
виде суммы трех независимых друг от
друга движений-вращений относительно
трех пересекающихся в неподвижной точке
осей. Гироскоп, обладающий этими тремя
движениями (тремя степенями свободы),
называется т р е х с т е п е н н ы м или
свобод н ы м. Он обладает замечательным
свойством: если момент М
всех внешних сил, действующих на его
ротор, относительно неподвижной точки
О равен нулю, то гироскоп сохраняет в
пространстве положение оси собственного
вращения (оси симметрии, или собственной
оси).
Попытка внешними силами возбудить вынужденное движение (прецессию) собственной оси гироскопа ведет к появлению так называемого гироскопического момента, который определяется через векторное произведение угловых скоростей собственного и вынужденного движений:
![]() = I
= I![]() (
).
(
).
Здесь I — момент инерции ротора гироскопа относительно собственной оси Oz.
Под воздействием
момента внешней возмущающей силы ось
гироскопа поворачивается, стремясь
совпасть с направлением вектора момента
внешних сил. При этом точка А приложения
силы движется (рис. 1.20, б) не в направлении
действия силы, а в направлении вектора
момента
![]() (
)
этой силы относительно неподвижной
точки О.
(
)
этой силы относительно неподвижной
точки О.
Е сли
же прецессия гироскопа ограничена или
невозможна, то пара сил, соответствующая
гироскопическому моменту, обусловливает
дополнительные нагрузки на опоры ротора
гироскопа
сли
же прецессия гироскопа ограничена или
невозможна, то пара сил, соответствующая
гироскопическому моменту, обусловливает
дополнительные нагрузки на опоры ротора
гироскопа
N
=
![]() =
=
![]() sin
sin![]()
где — угол между векторами и (рис. 1.21). С этими дополнительными нагрузками нельзя не считаться, так как в ряде случаев они могут преобладать над всеми остальными.
Благодаря своему свойству сохранять положение оси в пространстве гироскоп имеет весьма многочисленные технические применения.
Кроме того, очень важно, что гироскопическим эффектом обладают не только собственно гироскопы, но и все вообще быстро вращающиеся твердые тела, например роторы машин, приборов, аппаратов и других подвижных систем.
Изучение основных проблем, связанных с движением гироскопических систем, является предметом специальной науки — теории гироскопов. Эта наука в качестве математического аппарата широко использует простое и кратное (двойное) векторные произведения. Рассмотрим конкретные примеры.