

1.2.2 Расчет магнитной системы указателя
Расчет магнитной цепи с постоянными магнитами указателя сводится к определению величины индукции в рабочем зазоре и к нахождению размеров и материала магнита, требуемого для создания в рабочем зазоре магнитной индукции заданной величины и удовлетворяющего условиям оптимального его использования.
Форму и размеры магнита определяют из конструктивных соображений и заданных технических требований, предъявляемых к проектируемому прибору. При выполнении расчета считаем, что магнитным сопротивлением участков главной цепи магнитопровода, содержащих железо, можно пренебречь и что магнит намагничивается до установки его в систему. После выбора конструктивной схемы магнитной системы (приложение В) основная задача расчета заключается в определении Индукции в рабочем зазоре. Эта задача сводится к отысканию прямой возврата и точки состояния магнита на кривой размагничивания B=f(H), соответствующей нейтральной зоне магнита. Прямая возврата характеризуется средним значением коэффициента магнитного возврата ρ=tgα (смотри таблицу 3.3). Расчет магнитной системы указателя смотри в главе 2.
1.2.3 Расчет электромеханических параметров
(подвижной системы, указателя)
1. Определяем длину одного витка рамки из соотношения
lB = 2(A+B) м,
где А — длина рамки;
В — ширина рамки. Для термометров типа ТЦТ-9 ширина рамки В — 2r (рисунок 1.4, 1.5)
Соотношение А/В обычно берется в пределах 1,3 1,5.
2. Определяем число витков рамки
ω
=

где
 - сопротивление рамки гальванометра,
Ом;
- сопротивление рамки гальванометра,
Ом;
 -
длина одного витка, м;
-
длина одного витка, м;
γ - удельный вес материала (для алюминия γ = 2,646·104 Н/м3, для меди γ = 8,72·104 Н/м3);
ρ - удельное сопротивление материала рамки, Ом·м;
λ - показатель степени для веса подвижной системы на кернах 1,5 1,33 (в приборах с весом подвижной части менее 10-2 Н его принимают равным 1 [7]);
Q2 — балластный вес подвижной системы, Н
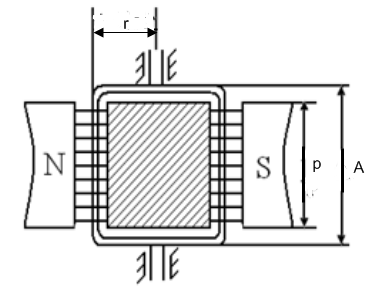
Рисунок 1.4- Принципиальная кинематическая схема измерительного механизма типа ТЦТ-9.
Балластный вес может изменяться от (3 0,45)·10-3 Н причем меньшее его значение соответствует меньшему показателю степени.
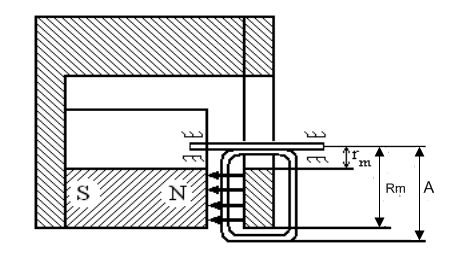
Рисунок 1.5-Принципиальная кинематическая схема измерительного механизма указателя типа ТВГ-1.
3. Определяем длину провода рамки
L=lBw м
4. Определяем сечение провода рамки
q=ρ м2
м2
5. Определяем поперечное сечение стороны рамки
S= м2
м2
где w — число витков рамки;
km - коэффициент заполнения, равный 0,7 0,8.
Величина площади поперечного сечения стороны рамки ограничивается при прочих равных условиях размером воздушного зазора, который берут равным (2 3)·10-3 м, а толщина рамки в пределах одного миллиметра; ширина ее поперечного сечения (2 3)·10-3 м.
6.Определяем активный вес рамки
Q1=
γ
ρ
7. Определяем вес подвижной системы
Q=Q1+Q2=2λQ1=
так как
Q2=(2λ-1)Q1
8. Определяем вращающий момент.
Для гальванометров с активной стороны рамки lp, параллельной оси вращения подвижной системы — указатель типа ТЦТ-9 (рисунок 1.4)
Mвр=2rlpwBBI Н·м,
где 2r — неактивная сторона рамки, м;
lp — активная часть рамки, м;
BB— магнитная индукция в воздушном зазоре, Тл;
I — ток в рамке, А.
Для гальванометра с активной стороной рамки, перпендикулярной к оси вращения подвижной системы, — указатель типа ТВГ-1 (рисунок 1.5)
 Н·м,
Н·м,
где Rm — внешний радиус кольца магнита, намагниченного по образующей, м;
rm— внутренний радиус кольца магнита, м.
9. Определение размеров противодействующей пружины (смотри главу 3).
10. Определение коэффициента добротности (смотри главу 2).
11. Оценка успокоения подвижной системы (смотри главу 3). Вычисляем величину полного критического сопротивления прибора из соотношения
 Ом.
Ом.
где m — коэффициент электромеханической связи;
 ;
;
 ;
;
с — коэффициент упругости пружины, Н·м/рад;
JC
— момент
инерции подвижной системы, кг·м2.
Момент инерции подвижной системы равен
сумме моментов инерции рамки —
 стрелки —
стрелки — и противовеса —
и противовеса —
 .
Моменты инерции подсчитываются по
формулам, приведенным в приложении 4 и
в главе 3.
.
Моменты инерции подсчитываются по
формулам, приведенным в приложении 4 и
в главе 3.
Производим оценку успокоения прибора.
Критерием оценки успокоения прибора служит соотношение между сопротивлением RG0+RBH и критическим сопротивлением Rk прибора.
Для обеспечения оптимального успокоения необходимо чтобы β было немного больше единицы. Степень успокоения прибора β равна
β=
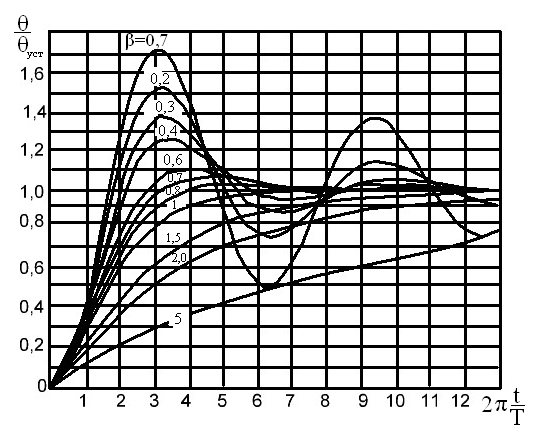
Рисунок 1.6 Универсальные кривые переходного процесса в системе второго порядка при единичной входной возмущающей функции
По величине β (рисунок 1.6) находим характер переходного процесса подвижной системы.
Определяем время успокоения подвижной системы:
ty≈
0,75 T0
для β<1
T0
для β<1
ty≈ T0 для β=1
ty≈ 1,5β T0 для β>1
где Т0 — период собственных колебаний подвижной системы определяется по формуле
Т0=2π сек.
сек.