

2.3.2 Определение зависимости величины магнитной индукции
в рабочем зазоре магнитоэлектрического логометра
с подвижными рамками
Основой для расчета служат два графика:
1) заданная характеристика шкалы указателя
 ;
;
2) зависимость отношения токов в рамках логометра от измеряемой величины
.
В результате совместного графического решения (рисунок 1.15) двух кривых
,
находится третья кривая

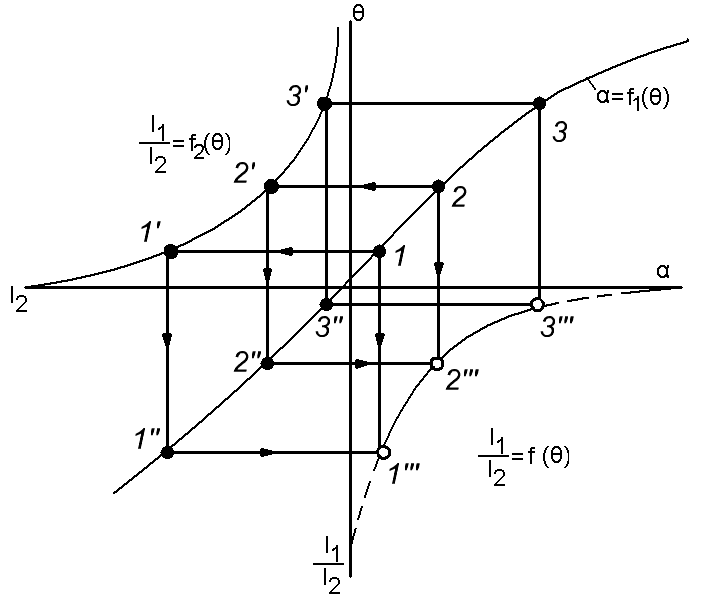
Рисунок 1.15- Определение зависимости угла поворота стрелки
логометра от измеряемой температуры.
Для удовлетворения заданной характеристики указателя по полученному графику =f(α) рассчитывают в относительных единицах необходимую магнитную индукцию в рабочем зазоре логометра по формуле
где
 — начальное значение индукции в
воздушном зазоре для первой рамки
логометра при угле отклонения подвижной
системы на угол
— начальное значение индукции в
воздушном зазоре для первой рамки
логометра при угле отклонения подвижной
системы на угол
 и условии, что стрелка подвижной системы
расположена в плоскости первой рамки,
принятое за единицу;
и условии, что стрелка подвижной системы
расположена в плоскости первой рамки,
принятое за единицу;
 — магнитная
индукция в зазоре для второй рамки при
отклонении подвижной системы на угол
кратный углу между рамками;
— магнитная
индукция в зазоре для второй рамки при
отклонении подвижной системы на угол
кратный углу между рамками;
 — соответственно
отношения
— соответственно
отношения
 и т. д. (находятся из графиков рисунок
1.15);
и т. д. (находятся из графиков рисунок
1.15);
для углов: α=0, α=γ, α=2γ и т. д.
Расчет значения магнитной индукции в относительных единицах по данной формуле ведется следующим образом:
при
α=0, k=0
 =1
=1
при
α=γ, k=1
 =
=
при
α=2γ, k=2
 =
=
при
α=3γ, k=3
=
при
α=nγ,
k=n
 =
=
В
результате расчета строим график
профиля магнитной индукции для углов
шкалы указателя
,
 ,
,
 и т. д (рисунок 1.16).
и т. д (рисунок 1.16).

Рисунок 1.16-Определение зависимости индукции в рабочем зазоре в зависимости от угла поворота подвижной части указателя.
Зная абсолютное значение максимальной индукции в рабочем зазоре, подсчитываем магнитную индукцию в любой точке шкалы указателя в соответствии с полученным графиком
 .
.
В
результате строим график
 (рисунок 1.17).
(рисунок 1.17).
Следует заметить, что полученным графиком лишь ориентировочно намечается конфигурация магнитного поля в рабочем зазоре магнитной системы логометра. Окончательная зависимость индукции от угла поворота подвижной системы может быть получена только опытным путем.
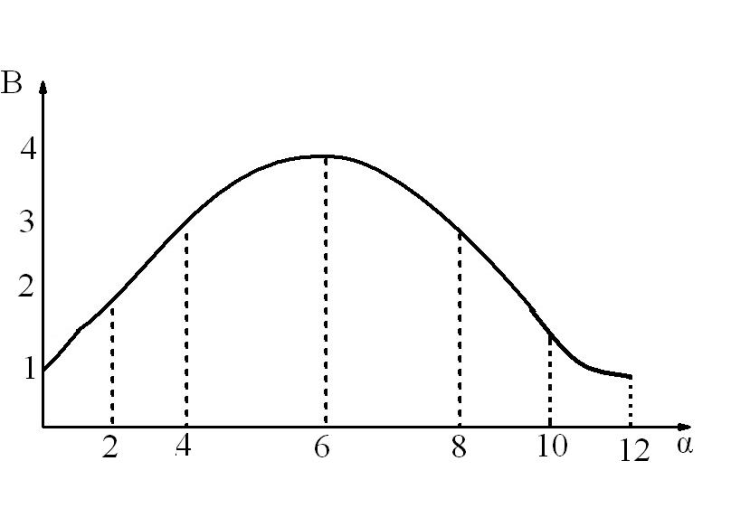
Рисунок 1.17- Зависимость индукции в зазоре от угла поворота.
Примечание.
Для указателей с переменной активной
длиной сторон рамок и постоянной
индукцией закон изменения их активных
длин определяется аналогично, полагая
в формулах
 и B0
текущую и начальную активную длину
рамок логометра.
и B0
текущую и начальную активную длину
рамок логометра.
Методику расчета магнитной системы смотри в главе 3.
2.3.3 Определение электромеханических параметров
подвижной системы магнитоэлектрического логометра
Эти параметры для логарифмов с подвижными рамками определяют по аналогии с магнитоэлектрическими милливольтметрами, методика расчета которых приведена при расчете указателя термоэлектрического термометра.
Величина удельного устанавливающего момента подвижной системы логометра определяется как разность наклона касательных к кривой моментов, соответственно первой и второй рамок в любой точке равновесия шкалы прибора.
 Н·м/рад.
Н·м/рад.
С учетом масштаба графика распределения магнитной индукции в рабочем зазоре (рисунок 1.17) выражение для удельного устанавливающего момента будет иметь вид
 Н·м/рад
Н·м/рад
или
при k=k1=k2=w2rlp
(рисунок 1.17); kтнв=w( )
)
 Н·м/рад,
Н·м/рад,
где
mB,
mα
— соответственно масштабы кривой
 по
по
осям
В
и
 (рисунок 1.17);
(рисунок 1.17);
I1,I2 - токи в рамках логометра для определенной температуры, а;
2rlp,Rm,rm - размеры рамки подвижной системы, м (рисунок 1.4, 1.5);
— число витков рамок логометра.

Рисунок 1.18- Принципиальная кинематическая схема
логометра со скрещенными рамками.
В
результате расчета строится график
 =f(α).
=f(α).
В случае синусоидального распределения магнитной индукции в зазоре (рисунок 1.18) устанавливающий момент вычисляется по формуле:
My=kBbI2 sinΔ Н·м,
sinΔ Н·м,
где Bb— максимальное значение индукции в рабочем зазоре, Тл;
I2— ток во второй рамке, соответствующий углу α, А;
α — угол отклонения первой рамки относительно начала отсчета углов (линии полюсов магнита) град;
δ — угол отклонения подвижной системы от положения равновесия, град;
 — угол
между рамками, град.
— угол
между рамками, град.