

§2. Методи реалізації кінематичного аналізу
Графічний метод;
Графоаналітичний;
Аналітичний.
I. Метод |
достоїнства: |
оперативність, наочність, простота; |
|
недоліки: |
низька точність, дискретність. |
|
|
|
III. Метод |
достоїнства: |
будь-яка точність, майже сплошність; |
|
недолік: |
складність реалізації. |
§3. Метод планів (графічний)
Методом планів будують плани положень механізмів у залежності від зміни координати початкової ланки, потім будуються плани швидкостей, (можна прискорень).
Існує 2 методи: засічок (годить для механізмів II кл) і метод геометричних місць (для механізмів III кл., тобто більш складних).
|
Механізм ІІ кл. (використовують метод засічок) |
Рис. 7. Метод засічок.
Особливі точки – це крайні точки ланок, тобто габаритні, а також центри мас (S2).
loa - фактична довжина, потрібно перетворити в зображувану (м переводимо мм), звідси масштабний коефіцієнт довжин;
![]()
|
Рис. 8. Метод геометричних місць. |
§4. Плани швидкостей
|
(Обертання навколо полюса - А).
|
б) |
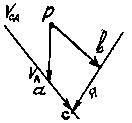
Визначення швидкості для будь-якої точки (С) кінематичного ланцюга, якщо відомі швидкості двох точок (А, В). VC - ?
|
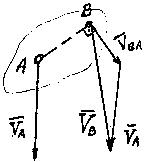
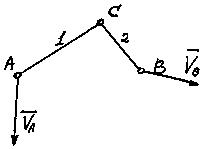
Рис. 9. Визначення швидкостей:
![]() -
будь-якої точки тіла; б) – сумісної точки
двох ланок.
-
будь-якої точки тіла; б) – сумісної точки
двох ланок.
Визначення
![]() - графічно. Будуємо план швидкостей.
- графічно. Будуємо план швидкостей.
Абсолютні швидкості виходять завжди з полюса.
З
рівняння (1) графічно зобразимо
, виразимо
![]() - масштабний коефіцієнт швидкості:
- масштабний коефіцієнт швидкості:
![]() , де pa
, де pa![]()
|
Лінія дії VСАСА проходить через обрану точку „ ”,. яка є кінцем вектора Р
Рв
|
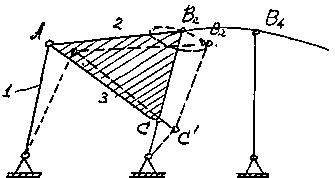
Приклад (для практичної роботи):
|
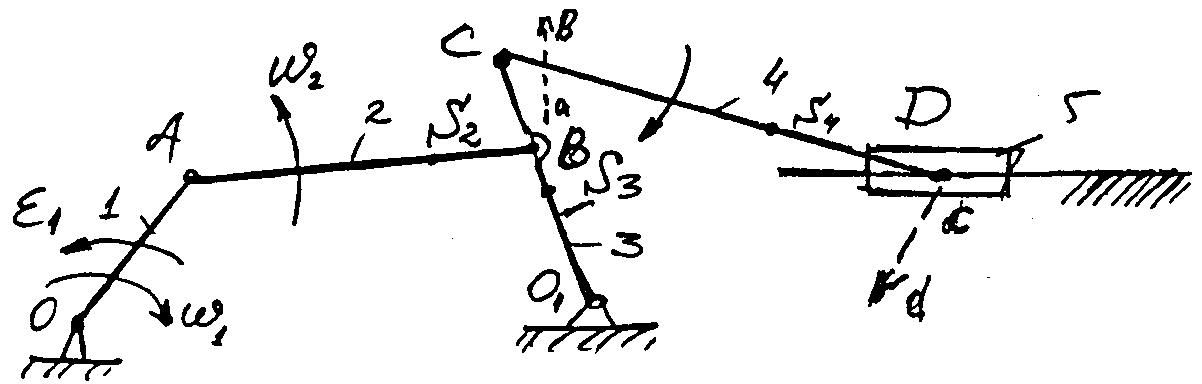
Рис. 10. Вихідний механізм.
Ланка 1 – початкова, задана 1.
План швидкостей дозволить намалювати картину лінійних швидкостей (будується без розрахунків).
Вибираємо (!) Р – полюс плану швидкостей.
Записуємо векторні рівняння швидкостей.
![]() (у
напрямку )
(у
напрямку )
![]() (у складі
ланки 2)
(у складі
ланки 2)
![]() (у складі
ланки 3) – для точки В.
(у складі
ланки 3) – для точки В.
Точка С: з подобія трикутників О1ВВ’ та О1СС’ (див. рис.).
|
умова:
Центри мас з пропорції:
|
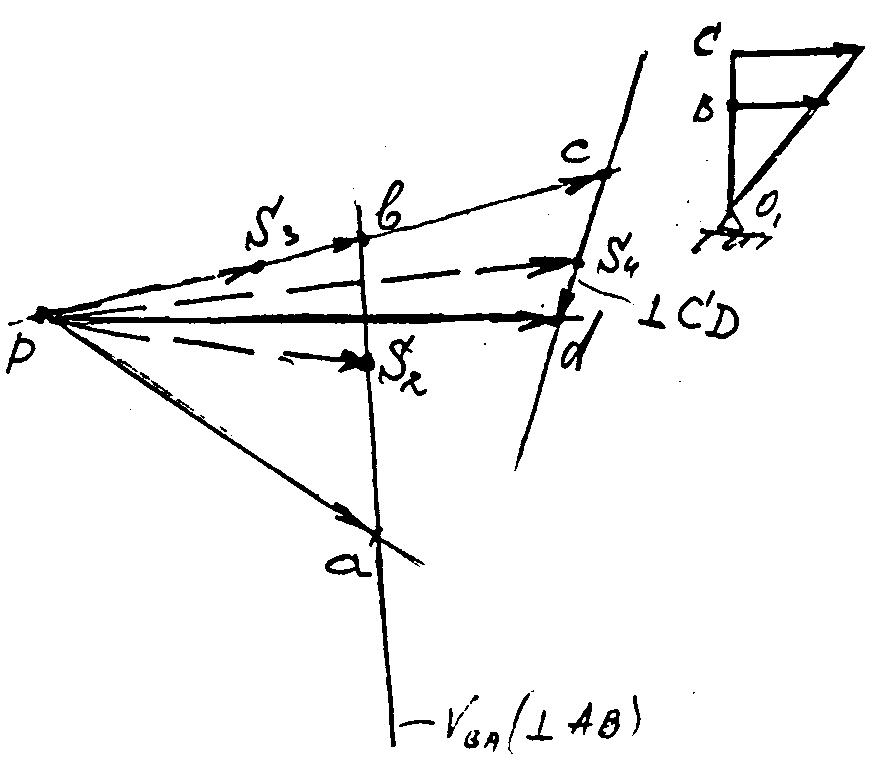
Рис. 11. План швидкостей.
2, 3, 4 - ? Для визначення
![]()
Напрямок визначається по швидкості на плані.
Кінетостатика §1. Силові фактори, що діють у машинах і механізмах п.1.Класифікація і їхня характеристика
Класифікація силових факторів (сила і момент пари сил):
рушійні сили і моменти ...;
корисного опору сили і моменти;
сили тяжіння;
сили шкідливого опору (тертя);
сили і моменти пар сил інерції;
реакції в кінематичних парах.
Цикл – шлях, час чи кут між 2 повтореннями кінематичних параметрів.
Позначення:
Рр – рушійна сила;
Мр - рушійний момент.
|
ДВЗ двотактний
За
цикл
|
б) |
|
Рис. 12. Рушійні силові фактори: - ДВЗ, б – електродвигун. |
|
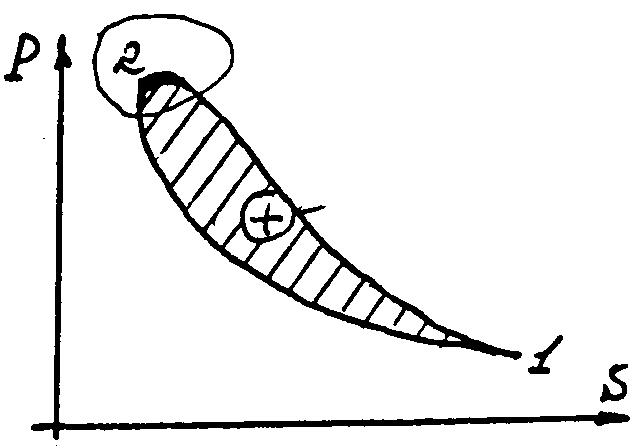
горение
расширение
сжатие Рис. 13. Індикаторна діаграма ДВЗ.
|
|

Робота рушійної сили позитивна якщо сила і вектор швидкості спрямований в одну сторону по однієї чи лінії кут між ними гострий.
|
Момент рушійних сил спрямований по напрямку обертання вала.
п.2. Сила корисного опору
Сила корисного опору виникає при підйомі вантажу, сили різання.
Рпс- сила корисного опору;
Мпс- момент пари сил корисного опору.
Рпс і Мпс роблять негативну роботу: А<0
![]()
![]() (У
компресорі робота за цикл <0).
(У
компресорі робота за цикл <0).
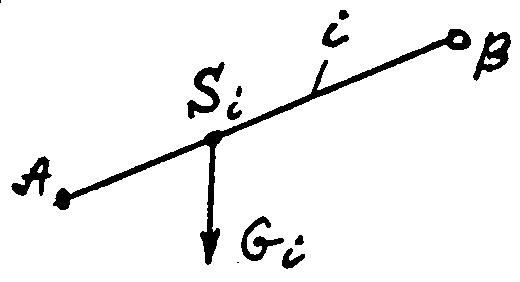
п.3. Сила тяжіння
Gi – сила тяжіння.
Gi =mig ;де i – індекс (№ ланки кінематичного ланцюга)
|
Робота сил тяжіння за цикл =0 АG=0 |
п.4. Сили тертя (шкідливі)
Виникають за рахунок відносного зсуву ланок, а також при впливі навколишнього середовища.
Сили тертя завжди протилежні чиненому руху, завжди роблять негативну роботу, викликаючи необоротні втрати.
п.5. Сила інерції
FUi і MUi – сили і моменти пар сил інерції, виникають у нерівномірному русі ланки.
Напрямок сили протилежно прискоренню центра мас.
Напрямок моменту пара сил інерції протилежно кутовому прискоренню ланки в обертальному русі.
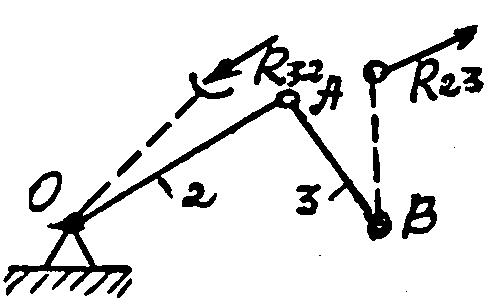
п.6. Реакції в кінематичних парах
Rij – реакція в кінематичних парах.
|
R32 – (3) – ланка, що впливає (2) – ланка, на яку впливає 3. Зв’язок: Rij=-Rji |
Рис. 14. Реакції в КП. |
|
§2. Визначення сил інерції і моментів пар сил інерції
Можливі 4 ситуації:
а) Ланка рухається прямолінійно (Viconst)
![]() si
– прискорення центра мас.
si
– прискорення центра мас.
|
|
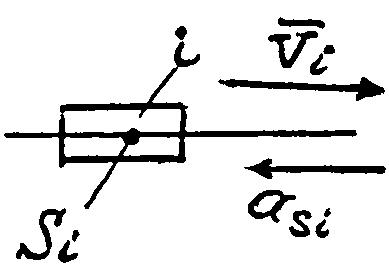
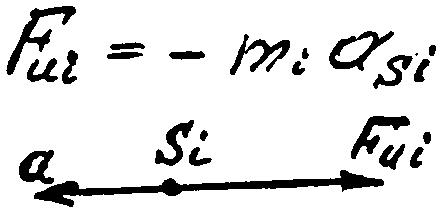
Рис. 15. Прискорення і сила інерції.
б) Обертальний рух ланки, ось проходить через центр мас.
Кінетостатичне дослідження плоских важільних механізмів
Кінетостатика враховує сили і моменти пар сил інерції в доповненні до статики (без обліку сил тертя чи з обліком їх).
Ціль дослідження кінетостатики: визначення реакцій у кінематичних парах; визначення сили, що врівноважує Рур чи моменту Мур на кривошипі.
Метод: |
1) Досліджується схема в заданому положенні. |
|
2) Схему розчленувати на гр. Ассура. |
|
3) До кожної гр. Ассура прикласти всі діючі силові фактори. |
|
4) До кожної гр. Ассура записати векторне рівняння сил і вирішити його методом плану сил (багатокутника сил). |
Кожен багатокутник дозволяє визначити сили реакції у парах.
Пари, що розриваються, повинні бути замінені еквівалентними реакціями.
Дослідження ведеться з найбільш віддаленої ланки від початкового механізму.