

2. Теоретична частина
2.1. Теорія механізмів і машин §1. Визначення і класифікація
Теорія механізмів і машин (ТММ) – наука, що займається аналізом і синтезом механізмів і машин.
Синтез – створення механізму чи машини по заданих умовах.
Аналіз – дослідження руху існуючого механізму (машини).
(А) Механізм – пристрій, призначений для полегшення праці людини.
Машина – пристрій для перетворення:
енергії;
матеріалів;
інформації;
для транспортування.
(Б) Механізм призначений для перетворення руху.
П.1. Умовна класифікація механізмів
Власне механізми, що перетворюють рух:
а) Обертальний в поступальний і навпаки (кривошипно-повзунний механізм.);
б) Обертальний в качательний;
в) обертальний рівномірний в обертальний нерівномірний, а також рух із зупинками.
Механізми в який перетвориться кутова чи швидкість і швидкість і напрямок обертального руху:
а) Зубчасті передачі (редуктори, мультиплікатори).
б) Валопроводи (суднові чи турбіна-насос).
Не відносимо гідро і пневмо передачі.
П.2. Класифікація машин
Енергетичні – перетворення будь-якого виду енергії в механічну і навпаки(дизель, електрогенератор,...).
Технологічні – для перетворення матеріалів і речовин (форма, якість, вага, геометрія). Це верстати, преси, і т.п.
Інформаційні – (крім ЕОМ) для обробки і перетворення інформації (інтегратори, арифмометри механічні).
Транспортні – транспортування матеріалів і людей (ліфти, транспортери і т.п.).
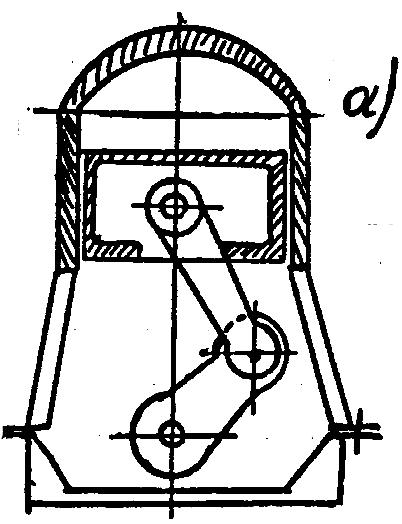
П.3. Зображення машин і механізмів
Схема – відображення механізму чи машини на площині.
Поділяються на:
конструктивні;
структурні.
кінематичні.
|
|
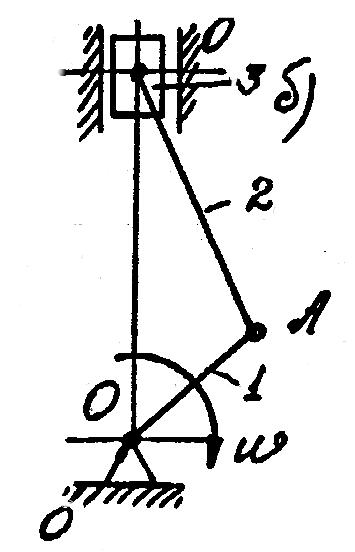
Структурна схема 1 - кривошип 2 - шатун 3 - повзун 0 - стойка |
Рис. 1. Схеми.
|
б - кінематична схема – та ж структурна, але виконана в масштабі. |
|
Ланка – у процесі роботи не змінює геометричних розмірів (шатун, повзун).
Ланки рухливо з'єднані одна з одною і утворюють визначену систему, називану кінематичним ланцюгом.
Механізм – кінематичний ланцюг, у якого хоча б одна ланка нерухома.
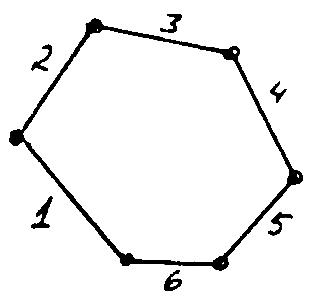
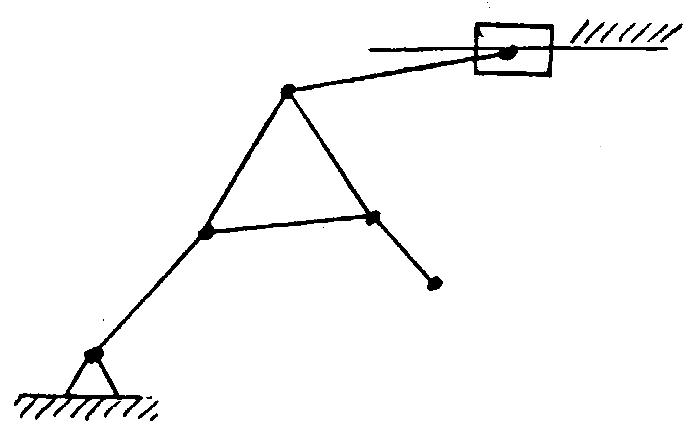
П.4. Класифікація механічних ланцюгів
1. Просторові і плоскі.
2. Прості і складні.
3. Відкриті і замкнуті.
|
|
Рис. 2. Ланцюги: |
|
|
б - плоский, складний, незамкнений. |
 б)
б)
Нерухома ланка називається стійкою.
Розглядаємо тільки плоскі механізми.
З'єднання 2х ланок називається кінематичною парою.
Вільне тіло в просторі має 6 ступенів волі: 3 обертальних і 3 поступальних.
Професор Ассур (1914 р.) розробив класифікацію КП і механізмів.
По Ассуру клас кінематичної пари визначається по кількості віднятих ступенів рухливості (зв'язків!)
Приклади КП.
Сфера на площині
|
КП-І – кінематична пара І класу. (5 ступенів рухливості) |
Циліндр на площині
|
КП-ІІ – Виключені – рухи по осі Z, перекидання навколо OY. |
|
КП-ІІІ – Виключені – рухи по осі OZ, та обертання навколо OX і OY. |
|
КП-ІІІ – виключені рухи по осях (сферичний шарнір). |
|
КП-IV – виключені 4 ступені волі |
|
КП-V – тільки обертальний рух. |
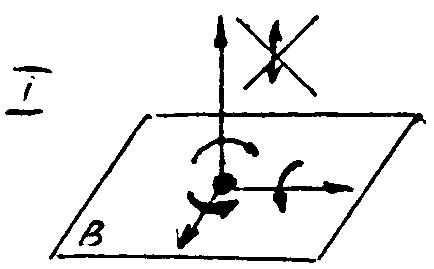
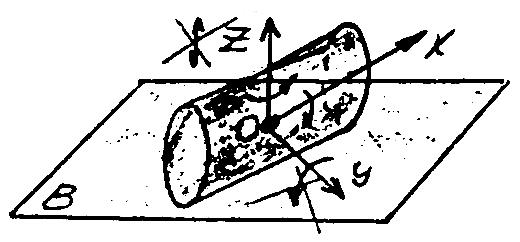
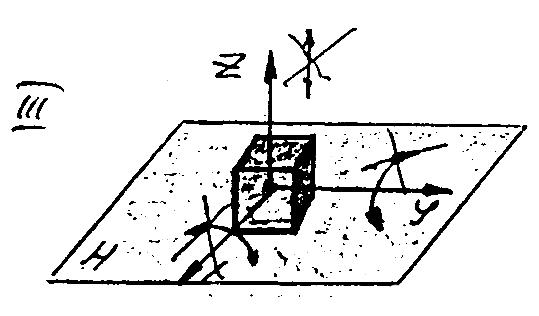
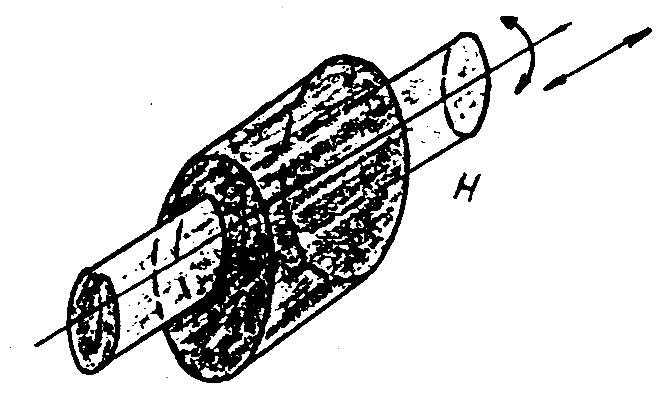
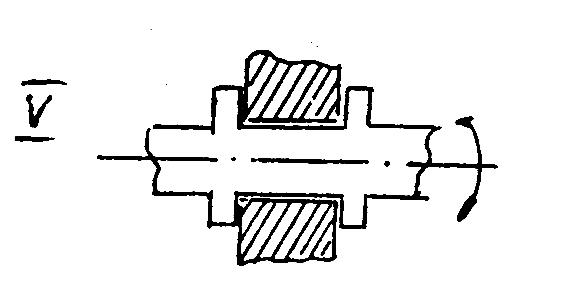
Рис. 3. Кінематичні пари.
До кінематичних пар застосовують поняття вища і нижча пара.
Вища пара – коли контакт відбувається в точці або по лінії (контакт ланок), у противному випадку нижча.
Приклади: вища кінематична пара – шестерні, кулачкові механізми, нижча – підшипники ковзання.