

Порядок выполнения работы.
Получить у преподавателя задание на сборку схемы пуска.
Заполнить таблицу (см. п. 5.3.)
В соответствии с заданием и исходя из наличия аппаратуры на стенде составить принципиальную схему, реализующую данный способ пуска.
П р и м е ч а н и я.
Схема должна содержать следующие обязательные элементы:
минимальную защиту;
защиту от максимального тока якоря;
защиту от обрыва цепи возбуждения;
амперметр для контроля тока якоря электродвигателя.
Для торможения электродвигателя необходимо применять динамическое торможение.
Предъявить вычерченную схему преподавателю и после получения разрешения начать её сборку, руководствуясь следующими соображениями:
Сборку схемы необходимо производить в следующей последовательности: цепь возбуждения – цепь управления – силовая цепь.
При сборке цепи управления необходимо одновременно собирать не более одной параллельной ветви, проверяя под напряжением правильность сборки каждой параллельной ветви. Переходя таким образом от одной параллельной ветви к другой, собрать всю цепь управления.
Сборку цепи управления целесообразно начинать с ветвей, содержащих кнопочные посты управления.
Проверку тех ветвей, в которых содержаться контакты аппаратов, втягивающие катушки которых находятся в силовой цепи, необходимо производить путём искусственного замыкания или размыкания этих контактов.
К сборке силовой цепи необходимо приступить только в случае правильной работы цепи управления.
После окончания сборки схемы опробовать её и произвести настройку схемы таким образом, чтобы:
а) пусковой ток был ниже максимально допустимого;
б) бросок тока при выводе пускового сопротивления был равен пусковому току.
Величина максимально допустимого тока якоря задаётся преподавателем.
Снять зависимость tпуск = f(Rп), tторм = f(Rт) при условии выполнения п. 4.5.
Содержание отчёта.
Отчёт о лабораторной работе должен содержать:
Принципиальную схему, выполненную в соответствии с требованиями ЕСКД.
Графики зависимостей по п. 4.6.
Перечень аппаратуры, использованной в схеме, согласно табл. 4.1.
Анализ полученных результатов и выводы.
Таблица 4.1
|
Буквенно-цифровое обозначение |
Тип аппаратуры |
Контакты, шт. |
Номинальное напряжение катушки, В |
Номинальный ток, А |
|||
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вопросы для самопроверки.
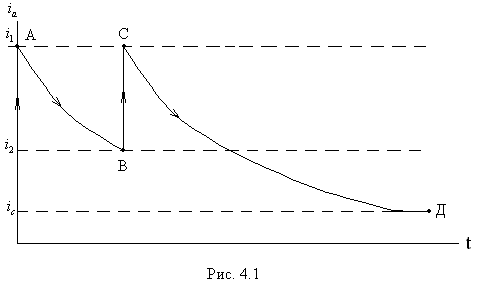
Как изменится пусковая диаграмма (положение точек А, В, С, Д), приведённая на рис. 4.1, если повторный автоматизированный пуск двигателя выполнить при изменившихся условиях? Принцип автоматизации пуска и характер изменения условий пуска (индекс 2) заданы таблицей вариантов 4.2.
Таблица 4.2
Принцип автоматизации |
Мс2>Mc1 |
Mc2<Mc1 |
Rп2>Rп1 |
Rп2<Rп1 |
Uс2>Uс1 |
Uc2<Uc1 |
Ф2>Ф1 |
Ф2<Ф1 |
f (t) |
1 |
4 |
7 |
10 |
13 |
16 |
19 |
22 |
f (Ea) |
2 |
5 |
8 |
11 |
14 |
17 |
20 |
23 |
f (Ia) |
3 |
6 |
9 |
12 |
15 |
18 |
21 |
24 |
В таблице:
f (t) – пуск в функции времени;
f (Ea) – пуск в функции ЭДС якоря;
f (Ia) – пуск в функции тока якоря;
Мс1 – статический момент нагрузки при первом пуске двигателя в соответствии с приведённой пусковой диаграммой;
Мс2 – статический момент при повторном пуске;
Rп1, Rп2 – пусковые сопротивления при первом и повторном пусках;
Uc1, Uc2 – напряжение сети при первом и повторном пуске;
Ф1, Ф2 – магнитный поток двигателя при первом и повторном пусках.
ЛАБОРАТОРНАЯ РАБОТА 5.
ИССЛЕДОВАНИЕ СИСТЕМЫ ГЕНЕРАТОР-ДЫИГАТЕЛЬ.
1. Ц е л и р а б о т ы:
Изучить свойства классической системы генератор – двигатель (Г-Д).
Изучить свойства системы Г-Д с отрицательной обратной связью по току главного контура.
Изучить свойства системы Г-Д с отрицательной обратной связью по току главного контура и бустерным возбуждением исполнительного двигателя.
2. Общая характеристика стенда.
Схема электрическая принципиальная исполнительного стенда представлена на рис. 5.1.
Схема содержит следующие элементы:
G1 – главный генератор;
G2 – возбудитель;
G3 – нагрузочный генератор;
G4 – тахогенератор;
М1 – исполнительный двигатель;
М2 – приводной двигатель возбудителя;
М3 – приводной двигатель главного генератора;
ПУ – пульт управления;
НОВ G2 – независимая обмотка возбуждения возбудителя;
ООСТ G2 – обмотка обратной связи по току возбудителя;
Q1 – выключатель обратной связи по току;
Q2 – переключатель возбуждения исполнительного двигателя;
ПУХС – регулятор нагрузки (пульт управления ходом судна);
КВ, КН – контакторы направления вращения;
РН – реле нулевой защиты;
РА1 – амперметр для измерения тока главной цепи (А);
РА2 – амперметр для измерения тока нагрузочного генератора (А);
PW – ваттметр (Вт*3);
PV1 – вольтметр для измерения напряжения главного генератора (В);
PV2 – вольтметр для измерения напряжения на ОВМ1 (В);
PV3 – вольтметр для измерения напряжения на ОВ1 (В);
Рn – тахометр (об/мин*10);
РС – реле скорости.
Цепь главного тока (главный контур) системы Г-Д образуется якорными обмотками исполнительного двигателя М1 и главного генератора. Кроме того, в главный контур включен амперметр РА1 и измерительный шунт RИ. Обмотка возбуждения ОВG1 главного генератора включена параллельно якорной обмотке возбудителя G2 через настоечное сопротивление R2 и реверсивный квадрат, образованный контактами контакторов направления КВ и КН.
Таким образом,

где IВГ1 – ток возбуждения генератора; ЕG2 – ЭДС возбудителя; Rа G2 – сопротивление якорной цепи возбудителя; RB G1 – сопротивление обмотки возбуждения.
Обмотка возбуждения ОВМ1 исполнительного двигателя через настроечное сопротивление R3 подключается к сети постоянного тока непосредственно (Q2 в положении «1») или через последовательно включенную якорную обмотку возбудителя (Q2 в положении «2»).
Таким образом, ток IВМ1 обмотки возбуждения исполнительного двигателя определяется следующим образом:
а) при переключении выключателя Q2 в положение «1»:

б) при переключении выключателя Q2 в положение «2»:

В случае (б) возбудитель G2 выступает по отношению к ОВМ1 в роли вольтдобавочной машины или бустера.
Возбудитель G2 имеет 2 обмотки возбуждения: независимую обмотку возбуждения НОВ G2 и обмотку обратной связи по току ООСТ G2, причём НОВ G2 подключена к выходу поста управления ПУ, а ООСТ G2 – к измерительному шунту RИ главного контура. Для двигательного режима работы главного двигателя обмотка ООСТ G2 включается таким образом, чтобы её намагничивающая сила была направлена встречно намагничивающей силе НОВ G2. Для того, чтобы это условие выпонялось для обоих направлений вращения исполнительного двигателя, ООСТ G2 включена через реверсивный квадрат, образованный контактами контакторов направления КВ и КН.
Для создания статического момента (момента сопротивления) на валу исполнительного двигателя М1 в схеме применяется нагрузочный генератор G3, вал которого жёстко соединён с валом исполнительного двигателя, а якорная обмотка закорочена через амперметр РА2. Ток возбуждения IВG3 генератора G3, а следовательно, и момент сопротивления, может изменяться путём изменения положения рукоятки ПУХС (пульт управления ходом судна).
Принципы работы различных вариантов схемы.
Классическая система Г-Д.
Для получения схемы классической системы Г-Д необходимо переключатель Q1 перевести в положение «Выкл.», что соответствует закорачиванию измерительного шунта RИ и, следовательно, выключению из работы цепи обратной связи по току главного контура. Переключатель Q2 необходимо перевести в положение «1», что соответствует подключению цепи возбуждения исполнительного двигателя непосредственно к сети. При этом регулировка угловой скорости исполнительного двигателя М1 осуществляется путём изменения (за счёт перевода рукоятки поста управления ПУ) напряжения на независимой обмотке возбуждения возбудителя G2, в результате чего изменяется ЭДС возбудителя, а следовательно, ток возбуждения, магнитный поток и ЭДС главного генератора.
Ток возбуждения исполнительного двигателя остаётся неизменным и определяется выражением (1). Следовательно, различным положениям поста управления соответствует семейство почти параллельных друг другу механических характеристик исполнительного двигателя (см. рис. 5.1), жёсткость которых определяется сопротивлением якорной цепи, действием реакции якоря главных машин и жёсткостью механической характеристики приводного двигателя генератора.
Реверс исполнительного двигателя производится путём перевода рукоятки поста управления ПУ из положения «Вперёд» в положение «Назад». При этом с помощью реверсивного квадрата изменяется направление тока возбуждения ОВ G1, а следовательно, изменяется полярность его ЭДС.
Система Г-Д с отрицательной обратной связью по току главной цепи.
Для получения указанной схемы необходимо перевести выключатель Q1 в положение «Вкл.», а переключатель Q2 – в положение «1». При этом в действие вводится цепь отрицательной обратной связи по току главного контура, которая осуществляется за счёт обмотки ООСТ G2 возбудителя. В такой схеме механические характеристики исполнительного двигателя (для двигательного режима) будут иметь резко выраженный характер («экскаваторный» вид) (см. рис. 5.3.), потому что на их жёсткость влияет, кроме факторов, упомянутых в п. 3.1, размагничивающее действие на возбудитель G2 обмотки ООСТ G2, намагничивающая сила которой направлена встречно намагничивающей силе НОВ G2. Так как цепь ООСТ G2 включена на падение напряжения на измерительном шунте RИ, то её намагничивающая сила прямо пропорциональна току главного контура.
Система Г-Д с отрицательной обратной связью по току и бустерным возбуждением исполнительного двигателя.
Для получения указанной схемы необходимо выключатель Q1 поставить в положение «Вкл.», а выключатель Q2 – в положение «2». Цепь возбуждения исполнительного двигателя подключается к сети постоянного тока через якорную обмотку возбудителя, и ток обмотки ОВМ1 определяется выражением (3). Механические характеристики исполнительного двигателя в такой схеме приобретают гиперболический вид (см. рис. 5.3.), т.к. с увеличением нагрузки на его валу за счёт действия обмотки ООСТ G2 происходит одновременное уменьшение тока возбуждения главного генератора и увеличение тока возбуждения исполнительного двигателя (см. выражения (1) и (3)).
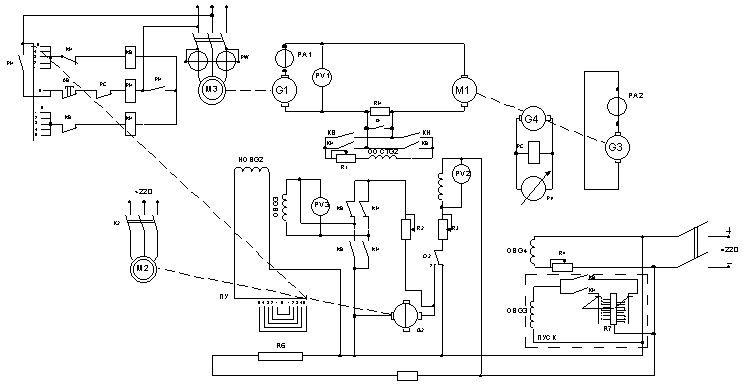
Рис. 5.1. Схема электрическая принципиальная лабораторного стенда.