

7.5. Порядок виконання роботи
Візуально оглянути лабораторну установку. Ознайомитися з призначенням кожного її елемента. Розробити ФСА автоматизації лабораторної установки.
Підключити блок БПІ-485 до СОМ-порта комп’ютера через відповідний кабель. У разі відсутності видимих ушкоджень за згодою викладача подати живлення на лабораторний стенд, ввімкнувши вимикач SA1.
На ПЕОМ запустити на виконання сконфігурований ОРС-сервер натиснувши в меню відповідну кнопку (Пуск\Програми\Microl\ModBus OPC Server\Конфігурація сервера). Через меню Файл даної програми виконати команду Зробити активним і у вікні, що відкриється, вибрати файл ОРС.ocf.
Крім того, необхідно запустити Редактор представлення даних СКАДА системи ТРЕЙС МОУД. В цій програмі відкрити файл проекту ОРС1.сtm. Повинні з’явитися вікна з мнемосхемою та графіками з параметрами технологічного процесу (рис. 7.5).
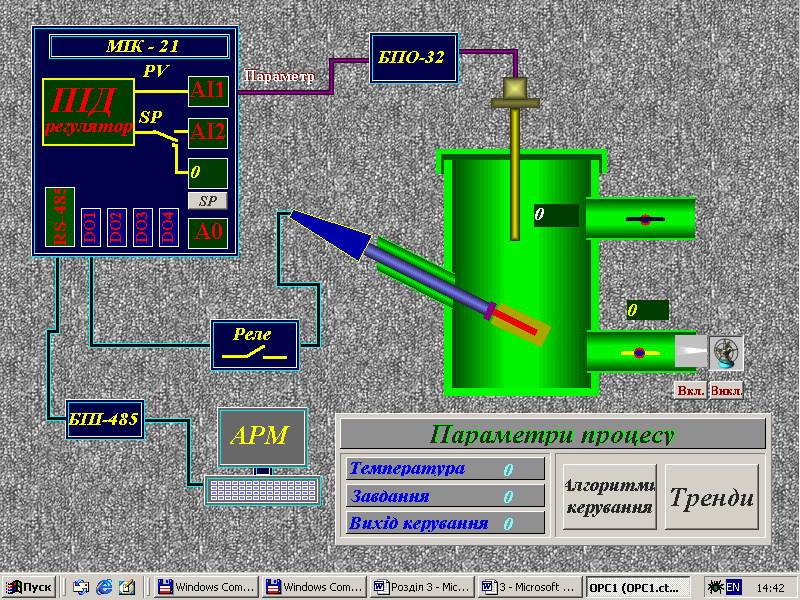

Рис. 7.5. Відеокадри дисплейних мнемосхем проекту АСУ ТП в ТРЕЙС МОУД
Запустивши програму
кнопкою
![]() ,
переконатися, що зв’язок з регулятором
встановився коректно. Про це свідчитиме
відсутність повідомлень про помилки
та правильність відображення значень
технологічних параметрів.
,
переконатися, що зв’язок з регулятором
встановився коректно. Про це свідчитиме
відсутність повідомлень про помилки
та правильність відображення значень
технологічних параметрів.
Перевести регулятор МІК-21 в ручний режим роботи, для чого натиснути на його передній панелі клавішу [Р/А] (індикатор РУ почне миготіти) та підтвердити дію натисканням клавіші [](індикатор РУ почне світитись, що свідчить про ручний режим роботи).
Переконатися, що система працює в усталеному режимі після чого стрибкоподібно змінити керуючий вплив регулятора. Зміну керуючого впливу можна проводити як з передньої панелі регулятора, так і у вікні СКАДА системи. На регуляторі потрібно клавішами [] [] встановити значення на 40-50 одиниць більшим (меншим) за попереднє.
В одному з графічних вікон ТРЕЙС МОУД потрібно спостерігати перехідний процес зміни температури в об’єкті керування до виходу його в усталений режим.
Користуючись отриманим графіком, записати в таблицю 7.1 значення температури та часу з певним кроком.
Таблиця 7.1
№ |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
t, с |
0 |
|
|
|
|
|
|
|
|
|
Т, C |
|
|
|
|
|
|
|
|
|
|
(T-T0)/Tmax-T0) |
|
|
|
|
|
|
|
|
|
|
За отриманими у п. 6 даними побудувати графік динамічної характеристики системи керування.
Зробити ідентифікацію об‘єкта керування:
виконати нормування перехідної характеристики до одиниці;
за кривою визначити параметри об’єкта керування - К0, Хуст, τd, T, R;
визначити передаточну функцію об’єкта керування;
побудувати перехідну характеристику розімкнутої системи, користуючись програмою SIAM або Matlab Simulink, порівняти її з експериментальною.
Наприклад, якщо об’єкт керування можна представити у вигляді 2-х ланок (аперіодичної та ланки запізнення), то схема у середовищі Matlab Simulink буде мати вигляд:
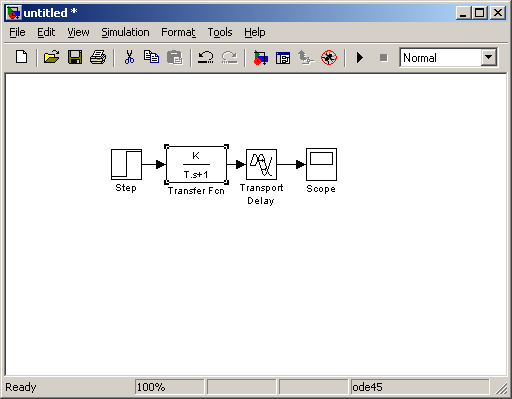
Рис. 7.6. Структурна схема розімкнутої АСР температури
Провести перевірку апроксимації перехідного процесу.
Перевірку апроксимації перехідних процесів проводимо з метою визначення точності апроксимації шляхом одержання перехідного процесу "зворотнім шляхом". Тобто за отриманими передаточними функціями одержуємо криву перехідного процесу і порівнюємо цю криву з експериментальною. В ідеальному випадку обидві криві повинні збігатися.
Для визначення перехідного процесу скористаємося програмою MatLab. Після введення у програму коефіцієнтів передаточної функції, одержимо графік y(t) реакції системи на одиничний ступінчатий вплив.
За результатами моделювання оформляємо табл. 7.2, у якій :
1-й стовпець – значення часу, с;
2-й стовпець – значення експериментальної кривої розгону, приведеної до безрозмірної форми;
Хнорм. – значення точок нормованої кривої, приведених у табл. 7.1;
3-й стовпець – значення функції y(t);
4-й стовпець – абсолютна похибка А, обчислена по формулі:
А = Хнорм.(t) - y(t);
5-й стовпець – абсолютне значення різниці квадратів Хнорм.(t) і y(t).
6-й стовпець – середньоквадратичне відхилення:
 .
.
На рис. 7.7 зображена експериментальна крива перехідного процесу і крива, отримана перетворенням передаточної функції об'єкта (за даними стовпців 1 – 3 табл. 7.2).
У 6-му стовпці записуємо середньоквадратичне відхилення для двох функцій, у даному прикладі СКВ = 0,007. Максимальна абсолютна похибка складає 2,4%.
Таблиця 7.2