

4.2.2. Бесколлекторные двигатели постоянного тока
Бесколлекторные двигателя постоянного тока (БДПТ) с возбуждением от постоянных магнитов (Brush-less Direct Current Motor with Permanent Magnets) часто еще называют вентильными двигателями (ВД). При контроле и преобразовании координаты положения ИМ их принято называть сервоприводами постоянного тока.
Эта машина по своей конструкции ничем не отличается от классического синхронного двигателя с постоянными магнитами (СДПМ), изменен лишь принцип питания. Если СДПМ питается от источника переменного тока или напряжения, как правило, формируемого при помощи ШИМ, то ВД – трапециидальным напряжением, питающим соответствующие фазы двигателя, и переключаемым по мере поворота ротора.
Являются приводами ЭИМ с переменной скоростью. Функциональная схема электродвигателя приведена на рис. 4.7.
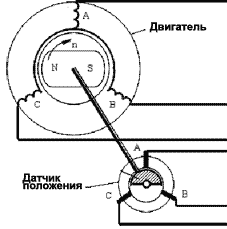
Рис. 4.7. Функциональная схема БДПТ
Представленный БДПТ состоит из статора с трехфазной обмоткой, соединенной в звезду, и возбужденного ротора в виде постоянного магнита, а также датчика положения ротора, выполненного в одном корпусе с двигателем. Датчик положения ротора выполнен с одним сигнальным элементом и тремя чувствительными элементами. Число чувствительных элементов равно числу обмоток статора. Датчик положения ротора предназначен для выработки сигналов управления моментами времени и последовательностью коммутации токов в обмотках статора.
Управление двигателем основано на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора. Данный тип двигателей был создан с целью улучшения свойств коллекторных электродвигателей постоянного тока.
Бесколлекторный двигатель объединяет в себе лучшие качества бесконтактных двигателей и двигателей постоянного тока.
Основными достоинства вентильных двигателей являются:
– высокие быстродействие и точность позиционирования;
– широкий диапазон изменения частоты вращения;
– большая перегрузочная способность по моменту;
– большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов;
– низкий перегрев электродвигателя при работе в режимах с возможными перегрузками;
– высокая надежность работы, поскольку отсутствует щеточный узел;
– большой ресурс электродвигателя ограничен, практически, только ресурсом подшипников;
– линейность регулировочной характеристики и меньший уровень электромагнитного шума по сравнению с коллекторными двигателями постоянного тока;
– применение в конструкции электродвигателя балансировочных колец потенциально может обеспечить стабильность работы при очень высоких скоростях вращения (десятки тысяч оборотов в мин).
– отсутствие искрообразующих элементов и, как следствие, высокая взрывобезопасность делают бесколлекторные идеальным силовым элементом в запорном оборудовании нефте- и газопроводов.
Бесколлекторные двигатели не имеют недостатков, присущих асинхронным двигателям (потребление реактивной мощности, потери в роторе) и синхронным двигателям (пульсация частоты вращения, выпадение из синхронизма). В отличие от шаговых двигателей БДПТ не требует сложных схем управления.
Как и у коллекторных двигателей, момент бесколлекторных двигателей прямо пропорционален току, а скорость зависит от напряжения питания и нагружающего момента.
СУИМ на основе БДПТ находят широкое применения в робототехнике, поскольку наличие встроенного датчика угла поворота позволяет создавать обратную связь по положению рабочих органов и делает бесколлекторный двигатель удобным при построении систем автоматического управления.
БДПТ на Российском рынке представлены несколькими сериями, в частности, сериями FL42BLS (питание напряжением ~24 В), FL57BL(S) (питание напряжением ~36 В), FL86BLS (питание напряжением ~48 В) мощностью от 26 до 660 Вт и скоростью вращения 3-4 тыс. об/мин. Серии FL57BL-JB и FL86BLS-JB имеют встроенный редуктор с коэффициентом редукции от 20 до 1333), некоторые серии имеют встроенные блоки управления (драйверы), формирующие управляющие сигналы «Разрешение», «Направление» и «Торможение».
БДПТ поставляются НПФ «Stepmotor», НПФ «Электропривод», НПО «Атом» и др.
В табл. 4.1, 4.2 приведены характеристики бесколлекторных электродвигателей двух серий – FL42BL и FL86BL
Внешний вид бесколлекторного электродвигателя FL86BLS58 приведен на рис. 4.8.

Рис. 4.8. Внешний вид БДПТ FL86BLS58
Характеристики бесколлекторных электродвигателей FL42BL Таблица 4.1.
Характеристики |
FL42BLS01 |
FL42BLS02 |
FL42BLS03 |
FL42BLS04 |
Напряжение питания, В |
24 |
|||
Максимальный потребляемый ток, А |
5,4 |
10,6 |
15,5 |
20 |
Мощность, на выходном валу, Вт |
26 |
52,5 |
77,5 |
105 |
Номинальная скорость, об/мин |
4000 |
|||
Номинальный крутящий момент, кг• см |
0,62 |
1,25 |
1,85 |
2,5 |
Максимальный крутящий момент, кг• см |
1,9 |
3,8 |
5,6 |
7,5 |
Сопротивление между линиями, Ом |
1,0 |
0,8 |
0,55 |
0,28 |
Индуктивность между линиями, мГн |
2,6 |
1,2 |
0,8 |
0,54 |
ЭДС обратной связи, В/1000об/мин |
3,66 |
3,72 |
3,76 |
3,94 |
Момент инерции ротора, г•см2 |
24 |
48 |
72 |
96 |
Длина L, мм |
41 |
61 |
81 |
100 |
Источник питания |
H150S24 |
H300S24 |
H1000S24 |
H1000S24 |
Характеристики бесколлекторных электродвигателей FL86BL Таблица 4.2.
Характеристики |
FL86BLS58 |
FL86BLS71 |
FL86BLS98 |
FL86BLS125 |
Напряжение питания, В |
48 |
|||
Максимальный потребляемый ток, А |
11 |
19 |
33 |
55 |
Мощность, на выходном валу, Вт |
110 |
220 |
440 |
660 |
Номинальная скорость, об/мин |
3000 |
|||
Номинальный крутящий момент, кг• см |
3,5 |
7,0 |
14,0 |
21,0 |
Максимальный крутящий момент, кг• см |
10,5 |
21,0 |
42,0 |
63,0 |
Сопротивление между линиями, Ом |
1,05 |
0,36 |
0,2 |
0,16 |
Индуктивность между линиями, мГн |
2,2 |
1,05 |
0,48 |
0,3 |
ЭДС обратной связи, В/1000об/мин |
10,5 |
11,5 |
13,5 |
11,5 |
Момент инерции ротора, г•см2 |
400 |
800 |
1600 |
2400 |
Длина L, мм |
58 |
71 |
98 |
125 |
Источник питания |
U500S48 |
H1000S48 |
|
|
Датчик положения ротора выполнен на основе датчиков Холла. В табл. 4.3 приведено назначение выводов кабеля БДПТ (см. рис. 4.8).
Назначение выводов кабеля Таблица 4.3.
Красный |
Вывод |
Питание датчика Холла |
Синий |
Холл A |
Фазы датчика Холла |
Зеленый |
Холл B |
|
Белый |
Холл C |
|
Черный |
GND |
Заземление датчика Холла |
Желтый |
Фаза U |
Фазы двигателя (обмотки статора соединены треугольником) |
Красный |
Фаза V |
|
Черный |
Фаза W |
При математическом описании БДПТ примем во внимание следующее:
– процессами коммутации фаз статора можно пренебречь, поскольку переключения осуществляются бесконтактными ключами;
– быстродействие БДПТ много выше, чем быстродействие ИМ (быстродействие изменения положения РО;
– быстродействие БДПТ много выше, чем быстродействие изменения технологических координат СУИМ (температуры, давления, расхода, уровня и др.);
– механическая характеристика двигателя жесткая, что позволяет считать изменение скорости вращения пропорциональным изменению действующего значения напряжения или частоты коммутации обмоток статора.
С учетом изложенного математическую модель привода можно рассматривать безынерционной пропорциональной, т.е. передаточная функция БДПТ имеет вид
![]() , (4.17)
, (4.17)
где – скорость вращения электродвигателя, рад/с;
![]() –
действующее значение напряжения питания
статора, В;
–
действующее значение напряжения питания
статора, В;
![]() – коэффициент передачи БДПТ, рад/В˖с.
– коэффициент передачи БДПТ, рад/В˖с.