

10 Характеристика «вход-выход» ув и способ её линеаризации.
Характеристика «вход-выход» определяет зависимость среднего значения выпрямленной э.д.с. УВ от сигнала (напряжения) на входе его системы импульсно-фазового управления (СИФУ), т.е. Ed = f(uу). Рассмотрим такую характеристику применительно к УВ с СИФУ, в которой сигнал uу сравнивается с пилообразным опорным напряжением uп (Рис.10.1).
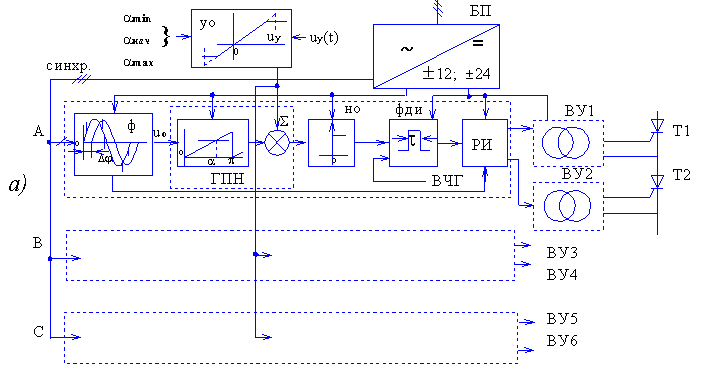
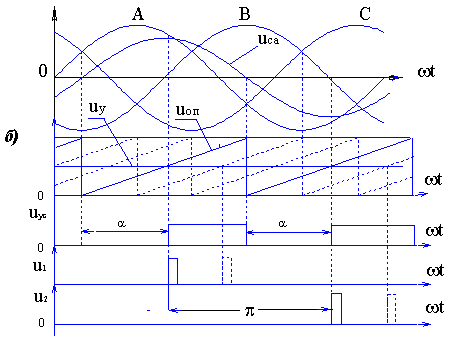
Рис.10.1. Функциональная схема системы импульсно-фазового управления m-фазным УВ (а) и диаграммы сигналов, поясняющие работу одного канала (б).
На схеме приняты обозначения: БП – блок питания; СУ – синхронизирующее устройство; Ф – фильтр ГПН – генератор пилообразного напряжения; НО – нуль-орган; ФДИ – формирователь длительности импуольсов; УО – управляющий орган; ВЧГ – высокочастотный генератор; РИ – распределитель импульсов; ВУ – выходное устройство; Т1, Т2 – тиристоры.
На Рис.10.1б показаны формы сигналов: Ucа – синхронизирующее напряжение первого канала СИФУ; Uп – пилообразное напряжение; Uуи – форма напряжения на входе ФДИ; Uу1, Uу2 – форма управляющих импульсов тиристоров анодной (Т1) и катодной (Т2) групп вентильного комплекта;
В момент равенства uу = uп вырабатывается импульс управления соответствующим тиристором. Начальный угол управления aнач при uу= 0 устанавливается напряжением смещения Uсм. Обычно aнач устанавливается таким, чтобы при uу=0 и отсутствии э.д.с. в цепи нагрузки (E = 0) величина выпрямленного тока Id равнялась нулю. С учётом зоны прерывистого тока, это достигается при aнач = p/2 + p/m.
Регулировочная характеристика СИФУ с таким значением aнач запишется в виде
p p p p p p
a = aнач - ¾ uу = ¾ + ¾ - ¾ uу = ¾ + ¾ - p uу* ,
Uпм 2 m Uпм 2 m
где Uпм – максимальное значение пилообразного напряжения, а uу*= uу/ Uпм.
Имея регулировочные характеристики Ed(a), например, на Рис.5.6 (лекция 5) и регулировочную характеристику СИФУ по выражению (10-1) можно построить результирующие характеристики «вход-выход» Еd(uу). На Рис.10.2 такие характеристики приведены для реверсивного (двухкомплектного) выпрямителя с раздельным управлением при m = 6 в виде зависимости относительных величин Еd*(uу*), где Еd*= Еd/ Еm и uу*= uу/ Uпм.
При
раздельном управлении тиристорные
группы «В» и «Н» работают поочерёдно и
независимо друг от друга, поэтому
результирующая характеристика
«вход-выход» реверсивного УВ представляет
собой комбинацию из характеристик
«вход-выход» двух нереверсивных УВ. Для
одного комплекта они располагаются
правее пунктирной синусоиды x(uу*),
т.е. в первом, четвёртом и третьем
квадрантах координатной плоскости и
соответствуют комплекту «В».
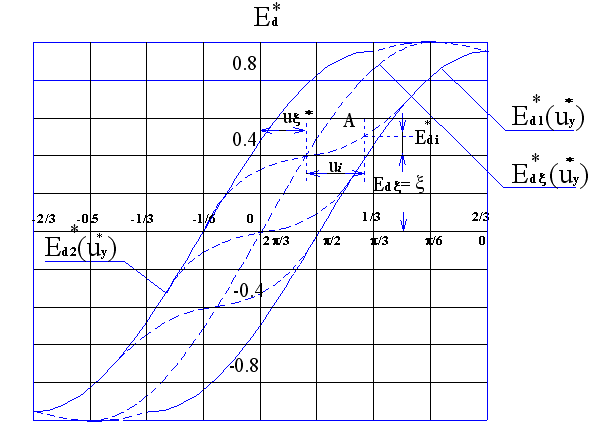
Рис.10.2.
Характеристики «вход-выход» реверсивного
УВ с раздельным управлением при
![]() ,
tgθмк
= 0,5, m=6 и различных значениях э.д.с.
нагрузки (ξ=-0,4; 0; 0,4)
,
tgθмк
= 0,5, m=6 и различных значениях э.д.с.
нагрузки (ξ=-0,4; 0; 0,4)
_____ в р.н.т. - - - в р.п.т. Пунктирная синусоида Е*dξ(uу*) определяет границу раздела характеристик комплектов «В» и «Н».
Для второй группы характеристики располагаются левее пунктирной синусоиды x(uу*), т.е. в третьем, втором и первом квадрантах и соответствуют комплекту «Н». Граничная кривая (пунктирный отрезок синусоиды
x(uу*)= Sin puу* (10-2)
разделяет «области» этих характеристик и соответствует нулевому току нагрузки, т.е. режиму идеального холостого хода УВ, когда э.д.с. нагрузки не ровна нулю. Переход с регулировочной характеристики одного комплекта на регулировочную характеристику другого происходит в моменты переключения логического устройства при нулевом токе нагрузки, т.е. всегда в одной из точек граничной кривой (10-2). Избежать прерывистых токов с таким принципом регулирования невозможно2.
Сплошными линиями на Рис.10.2 показаны характеристики «вход-выход» в режиме непрерывного тока, т.е. зависимости Еd1*(uу1*) и Еd2*(uу2*) для первого «В» и второго «Н» комплектов УВ соответственно. Пунктирными линиями в области между характеристикой (10-2) и одной из характеристик Еd1*(uу1*) или Еd2*(uу2*) располагается множество характеристик «вход-выход» в режиме прерывистого тока для комплектов «В» или «Н» соответственно. В качестве примера такие характеристики показаны на Рис.10.2 для трёх значений э.д.с. двигателя (x= -0,4; 0; 0,4) и значении tgq = 0,5. При токе нагрузки равном нулю эти характеристики сходятся к пунктирному участку синусоиды
x(uу*) = Sin(π·uу*). (10-3)
Таким образом, характеристики «вход-выход» реверсивного УВ с раздельным управлением существенно нелинейны и неоднозначны, ибо их форма зависит не только от сигнала uу, но и от величины э.д.с. нагрузки Е. Учитывая этот факт выпрямленную э.д.с. Ed можно условно представить в виде суммы из двух слагаемых:
Ed = Edx + Edi, (10-4)
где Edx– среднее значение э.д.с. УВ, компенсирующее э.д.с. нагрузки ξ, т.е. Edx=Е;
Edi – среднее значение составляющей э.д.с. УВ, равное падению напряжения в активном сопротивлении нагрузки (в якорной цепи), т.е. Edi= IdRя.
Рассмотрим графики зависимостей каждой из составляющих Edx и Edi от сигналов uуξ* и uуi*. Будем полагать, что режим работы УВ определяется, например, точкой А на плоскости Рис.10.2, для которой составляющие Edx* и Edi* определяются соответствующими отрезками оси ординат, а составляющие сигнала управления uу* – соответствующими отрезками оси абсцисс uуx* и uуi*. Очевидно, что для первой составляющей c учётом (10-3)
uyξ* = (arksin ξ)/π (10-5)
т.е. характеристика совпадает с координатами точек граничной кривой на Рис.10.2 (пунктирный отрезок синусоиды).
Для второй составляющей uуi*= f(Edi*) характеристика может быть построена лишь графически. Такое построение можно выполнить, перемещая точку А по одной из выбранных характеристик «вход-выход» и используя отрезки uуi* и Edi* в качестве значений координат для искомой зависимости uуi*= f(Edi*). Таким способом построены характеристики, показанные в виде графиков на Рис.10.3 для трёх разных значений x при tgq = 0,5.
Как видим зависимости для каждой из составляющих Edx*(uуx*) и Edi*(uуi*) существенно нелинейны.

Рис.10.3. Характеристика составляющей э.д.с. УВ Еdi (нелинейного звена НЗ2);
_____ для р.н.т.; - - - для р.п.т.
Рассмотрим способ линеаризации регулировочной характеристики УВ с помощью двух дополнительных нелинейных звеньев НЗ1 и НЗ2 с характеристиками обратными к нелинейностям Edx*( uуx*) и Edi*(uуi*) соответственно. Это достаточно удобный способ построения замкнутой системы вентильного электропривода постоянного тока и, в частности, удобный алгоритм при его микропроцессорной реализации.
Функциональная схема реверсивного УВ с дополнительными нелинейностями и раздельным управлением комплектами с помощью ЛУ, приведена на Рис.10.4. Схема содержит один комплект СИФУ, управляющие импульсы которого поступают на тиристоры через ключи КВ2 и КН2, к работающему в данный момент комплекту «В» или «Н».
Ключами КВ1 и КН1 инвертируется суммарный сигнал управления uу на входе СИФУ при смене работающего комплекта.
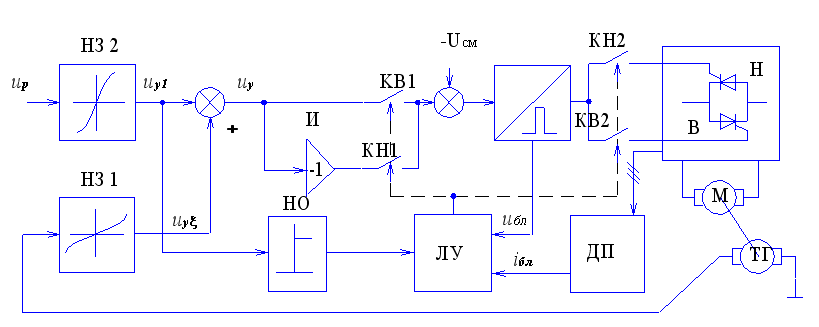
Рис.10.4. Функциональная схема реверсивного УВ с устройствами линеаризации характеристик и раздельным управлением комплектами для регулируемого электропривода.
Нелинейное звено НЗ2, на вход которого подаётся внешний по отношению к УВ сигнал (например, с выхода регулятора в структуре электропривода), обеспечивает линейную зависимость между напряжением этого регулятора uр и величиной среднего значения тока Id или составляющей Edi = IdRя. Фактически с помощью НЗ2 достаточно обеспечить равенство Edi*= uр* или Edi*Uпм = uр.
Нелинейное звено НЗ1 в канале положительной обратной связи по э.д.с. или по частоте вращения двигателя, если w º Ед (при постоянном магнитном потоке), обеспечивает линейную зависимость между величинами сигналов обратной связи по э.д.с. нагрузки Е и составляющей э.д.с. УВ Edx т.е. Edx*= x или (Ктгw/Uпм) = x. Его характеристика определяется выражением (10-5).
Сигналы с выходов нелинейных звеньев складываются и подаются через ключ КВ1 или через инвертор И и КН1 на вход СИФУ. Сюда же (на вход СИФУ) подаётся постоянное напряжение смещения Uсм, определяющее начальный угол управления aнач при равенстве нулю суммы сигналов НЗ1 и НЗ2. Последнее означает, что область регулирования управляющего напряжения uу находится в зоне Uсм > uу > -Uсм.
Заметим, что если напряжение смещения в точке суммирования на Рис.10.5 отрицательно Uсм = -(1/2 + 1/m)Uпм, (где Uпм – амплитуда пилообразного напряжения и одновремённо базовая величина для сигналов управления), то характеристика «вход – выход» реверсивного УВ с раздельным управлением комплектами в относительных единицах будет выглядеть так, как это показано на Рис.10.2. Характеристика нелинейного звена НЗ1 в относительных единицах будет представлять собой арксинусную зависимость по выражению (10-5), а нелинейного звена НЗ2 так как это показано на Рис.10.3. Характеристика нелинейного звена НЗ2 в этом случае компенсирует нелинейность УВ по сигналу uуi (нелинейность графиков на Рис.10.3), а нелинейного звена НЗ1 - по сигналу положительной обратной связи по э.д.с. нагрузки Е. Зависимости Edx(Е) и Edi(uр) с характеристиками НЗ1 и НЗ2 в структуре Рис.10.4 получаются линейными во всём диапазоне изменения Е и Id.
В случае использования микропроцессорных средств для реализации характеристик нелинейных звеньев НЗ1, НЗ2 структуры по Рис.10.4 можно обеспечить практически строгое равенство между составляющей Edx, формируемой на выходе УВ сигналом положительной обратной связи Ктгw, и фактической величиной Е в цепи нагрузки, а также строгую пропорциональность между сигналом uр и величиной тока Id на выходе того же УВ.
Такие качества реверсивного УВ обеспечивают точное управление любыми другими параметрами движения в замкнутой системе вентильного электропривода. Однако, даже при достаточно грубой аппроксимации нелинейностей НЗ1 и НЗ2 с помощью одного или двух изломов (например, с помощью аналоговых устройств на базе операционных усилителей) обеспечиваются вполне удовлетворительные результаты в регулируемых электроприводах с глубоким диапазоном изменения скорости (до1/10000).