

4.1 Параметрические стабилизаторы. 21
На рис. 10 RСТ, определяется выражением

Из
рис. 10 следует где R1
и
rg
-
стабильные величины.
величины.
Положим, что Uн = Un(Uп , Rн), тогда для параметрического стабилизатора можно найти КСТ1 и KCT2 , см. формулы 11-15:

В большинстве случаев Rн>> rg и R1>> rg , тогда выражения 19-20 примут вид:
В литературе при характеристике параметрических стабилизаторов на стабилитронах пользуются коэффициентом
![]()
22 4 Непрерывное регулирование
т.е. коэффициентом обратным КСТ1 , влияние нестабильности RН не рассматривают.
Из выражения 21 следует, что если R1 →∞ со , то Кст1 → 0. Значит при проектировании стабилизатора необходимо увеличить R1 у но тогда будет уменьшаться КПД стабилизатора

Разработчик должен принять некоторое компромисное решение. Формула 21 показывает, что стабилитроны лучше всего запитывать от стабилизатора тока, т.к. его выходное сопротивление, в идеале, стремится к ∞ ,т.е. R1 →∞
При проектировании ПСН на стабилитронах необходимо выполнить условие, см. рис. 9а
![]()
Где ICТ.MAX - максимальный ток стабилизации. Если I > ICТ.MAX то при случайном отключении нагрузки стабилитрон может выйти из строя.
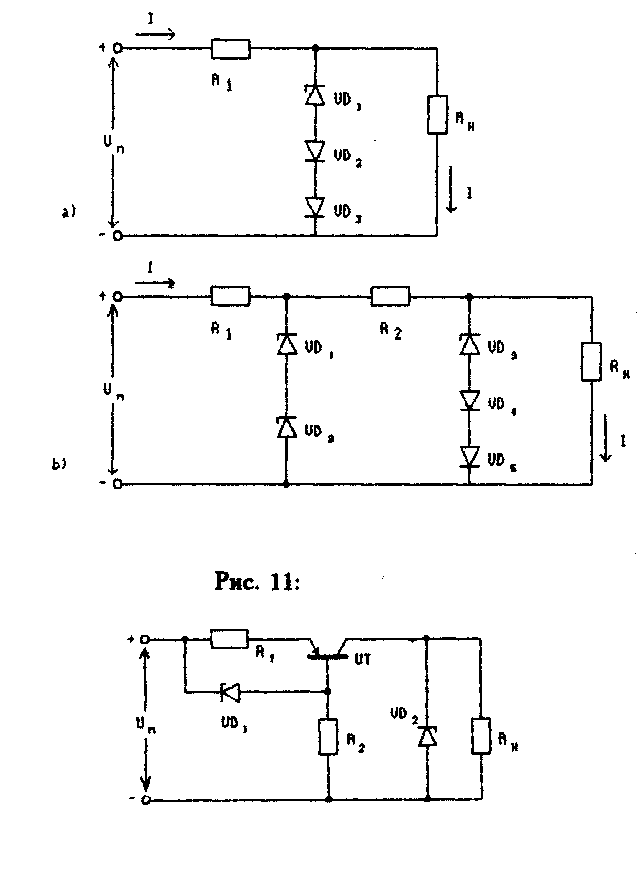
На рис. На изображен однокаскадный ПСН с двумя тер-мокомпенсирующими диодами VD2 и VD3 :
Выходное
сопртивление ПСН, см. рис. 9, определяется
выражением
 где
r0
- выходное сопротивление источника
питания.
где
r0
- выходное сопротивление источника
питания.
На рис. 11b изображена двухкаскадная схема ПСН, диоды VD4 и VD5 термокомпенсирующие
На рис. 12 изображена схема ПСН с токостабилизирующим двухполюсником, который состоит из R1 , R2 , VD1 , VT
4.1 Параметрические стабилизаторы. • 23
*
f
Рис. 12: ПСН на стабилетроне VD2 , питаемый от стабилизатора тока.