

Регулятор подъема
На всех крупных подъемных машинах, выпускаемых с 1963 года., установлен регулятор подъема, контролирующий выполнение тахограммы подъема в периоды равномерного хода и в начале замедления, предохраняющий установку от переподъема клетей (скипов) и сигнализирующий о подходе подъемных сосудов к приемной площадке. Регулятор подъема приводит во вращение сельсин-датчик указателя глубины и в действие регуляторы ограничения скорости типа РСС-5914 (РОС-5912).
Кинематическая схема регулятора подъема представлена на рис. 9.5. Вращение от вала подъемной машины через привод регулятора передается валу 1 регулятора подъема и через зубчатую передачу 2 –валу 3, на котором установлено отключающее диафрагменное расцепное устройство 4. Вращение валов 1 и 3 регулятора подъема через цилиндрическую и червячную передачи передается на валы двух ретардирующих дисков 5, на которых установлены контролирующие профили 6.
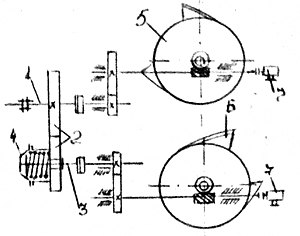
Рис. 9.5. Кинематическая схема регулятора подъема
На каждом ретардирующем диске могут быть закреплены профили замедления, ускорения, контроля скорости.
Положения ретардирующих дисков соответствуют положениям подъемных сосудов в стволе; движение дисков осуществляется попеременно в одну и другую стороны. Полный угол относительного смещения дисков соответствует максимальной высоте подъемных сосудов.
Сельсин-датчики 7 указателя глубины приводятся во вращение от червячного вала регулятора подъема непосредственно или через ускоряющую передачу.
На регуляторе подъема установлены:
- два концевых выключателя (по одному на ретардирующий диск) для подачи импульса (сигнала) на отключение подъемного электродвигателя в конце равномерного движения;
- два концевых выключателя (по одному на ретардирующий диск) для защиты от переподъема; контакты выключателей заведены в цепь катушек контакторов предохранительного торможения;
два микровыключателя, осуществляющие блокировку включения и отключения расцепного устройства ретардирующего диска переставного барабана;
- два сельсин-датчика для передачи вращения к сельсин-приемникам указателя глубины;
- два регулятора ограничения скорости (по одному на ретардирующий диск) для защиты подъемной машины от превышения заданной скорости при равномерном движении и замедлении;
- сельсинный командоаппарат автоматического управления (на скиповых подъемах с асинхронным приводом), который является датчиком заданной скорости в системе регулирования хода в период замедления;
- два сельсинных командоаппарата автоматического управления (на подъемных машинах с приводом на постоянном токе) для программного регулирования хода подъемной машины.
Указатели глубины
Указатели глубины шахтных подъемных машин предназначены для указания местоположения подъемных сосудов в стволе, подачи сигналов в период замедления и защиты подъемных сосудов от переподъема.
Применяемые в настоящее время для подъемных машин указатели глубины разделяются на механические, имеющие непосредственное связь с коренным валом подъемной машины, и электрические (сельсинные), не имеющие механической связи с коренным валом машин. Механические указатели глубины, применяемые для малых и крупных подъемных машин, различаются между собой конструкциями ограничителей скорости.
Указатель глубины малых подъемных машин имеет два ходовых винта 1, установленных вертикально в корпусе указателя глубины. На ходовых винтах установлены гайки 2 с прикрепленным к ним стрелками. При вращении винтов одна гайка движется вверх, а другая – вниз. Направление движения стрелок соответствует направлению движения подъемных сосудов в стволе шахты. Передаточное отношение колонки указателя глубины выбирается таким, чтобы за время прохождения высоты подъема сосудов в стволе шахты стрелки проходили всю шкалу 3 указателя глубины. Это дает масштабное изображение движения сосудов в стволе и указывает место их наблюдения.
Для подбора нужного передаточного отношения указатели глубины выполняют со сменными винтами и шестернями. Максимальный ход стрелок по шкале указателя глубины составляет 1450 мм.
Указатель глубины малых подъемных машин имеет два ретардирующих диска 6 с профилями 4, предназначенными для воздействия на командоаппарат электрического ограничителя скорости.
Сигнальное устройство 5 указателя глубины позволяет подать один или несколько сигналов в момент подхода сосуда к приемной площадке.
Указатель глубины крупных подъемных машин, выпускающихся до 1963 г., конструктивно совмещен с ограничителем скорости НКМЗ и состоит из следующих основных частей: двух ходовых винтов 1, сигнальной тяги 2, звонка 3, двух гаек со стрелками 4, шкалы 5 указателя глубины, двух ретардирующих дисков 6, привода 7, защелки трехходового крана, корпуса 8, в которое вмонтирована ограничитель скорости НКМЗ. Максимальный ход стрелок указателя глубины равен 1750 мм.
Сигнальное устройство механических указателей глубины устроено следующим образом. К задним стойкам 9 на шарнирах крепят сигнальную тягу 2 с выступающими упорами 10. гайка указателя глубины, двигаясь вверх, цепляет указательным на ней кулачком 11 за упор 10, поднимает тягу 2 и отклоняется в сторону боек 12 сигнального звонка 3. при дальнейшим движении гайки упор соскальзывает с кулачка, а тяга, возвращается в исходное положение, ударяет бойком по звонку. Количество сигналов зависит от количества закрепленных на сигнальной тяге упоров.
В последние годы на шахтных подъемных установках получили широкое распространение сельсинные указатели глубины УГС-4 и УГС-1.
Сельсинный указатель глубины не имеет механической связи с коренным валом подъемной машины. Положения подземных сосудов в стволе шахты фиксируется на пульте управления с помощью синхронной сельсинной передачи. При этом механическое вращение коренного вала подъемной машины преобразуется в электрический ток, который передается по проводам к указателю глубины на пульте управления, где этот ток преобразуется в механическое вращение шкалы указателя глубины.
Преобразование механического вращения коренного вала в электрические токи осуществляется бесконтактными сельсин-датчиками, установленными на регуляторе подъема или в аппарате задания и контроля хода.
Обратное преобразование электрического тока в механическое вращение шкалы (стрелок) указателя глубины производится бесконтактными сельсин-приемниками, установленными в указателе глубины на пульте управления.
Бесконтактный сельсин (рис. 9.6.) имеет три фазные обмотки синхронизации 1, расположенные на статоре так, что их магнитные оси смещены относительно друг друга на 120о, и обмотку возбуждения из двух кольцеобразных катушек возбуждения 2, расположенных на краях статора.
Ротор сельсина обмотки не имеет и выполнен в виде двух продольных магнитно-разобщенных шихтованных пакетов 3. Зазор между пакетами заполнен немагнитным материалом. Ротор опирается на два подшипника, расположенных в переднем и заднем щитках и свободно вращается с равномерным зазором.
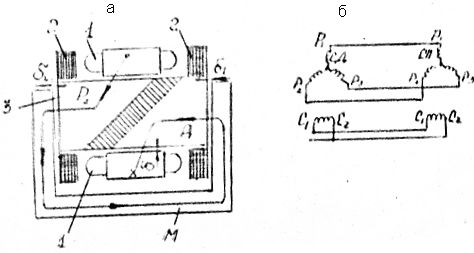
Рис. 9.6. Бесконтактный сельсин: а – принципиальная схема; б – схема соединения обмоток сельсин-датчика и сельсин-приемника.
Магнитный поток, создаваемый однофазными катушками возбуждения 2, проходит через дополнительный зазор в первый пакет ротора, затем через основной зазор в зубьях пакета статора, по спинке статора, попадает во второй пакет ротора и замыкается через дополнительный зазор и дополнительный магнитопривод М.
Поворачивая ротор, можно изменять количество магнитных силовых линий, пересекающих каждую фазную обмотку и, следовательно, величину индуктированной в каждой фазной обмотке электродвижущей силы (э.д.с.).
Для осуществления синхронной передачи фазные обмотки сельсин-датчика и сельсин-приемника соединяются между собой приводами, а их обмотки возбуждения включаются в цель общего источника переменного тока.
При вращении ротора сельсин-датчик фазные обмотки сельсин-приемника под действием трех меняющихся индуктированных э.д.с. создают постоянный по величине магнитный поток, имеющий всегда тоже направление, что и поток возбуждения сельсин-датчика.
Таким образом, механическое вращение ротора сельсин-датчика преобразуется во вращение магнитного потока фазных обмоток сельсин-приемника, что в конечном результате приводит к соответствующему вращению ротора сельсин-приемника.
При приходе подъемного сосуда на приемную площадку или горизонт машинист следит за подходом визира к метке на неподвижной шкале, соответствующей данной приемной площадке или горизонту. При проходе одной из крайних меток визира на неподвижной шкале машинист следит за диском, на котором также имеется метка нужной приемной площадки или горизонта. При совпадении меток на диске, визире и неподвижной шкале фиксируется нужное положение подъемного сосуда.
Сельсин указатель глубины позволяет машинисту довольно точно определить положение подъемного сосуда в стволе шахты без визуального контроля по ободу барабана подъемной машины.
Большим преимуществом сельсинных указателей глубины является возможность дистанционной подачи сигнала, что позволяет устанавливать пульт управления подъемной машины в практически любом удобным для управления месте. Однако, следует иметь в виду, что при исчезновении напряжения питания сельсинного указателя глубины может произойти рассогласование его показаний с действительным положением подъемных сосудов в стволе шахты. Поэтому возобновление работы подъемной установки в таких случаях следует производить со скоростью 1,5 м/сек. С такой скоростью подъемный сосуд проводят к приемной площадке и устанавливают на ней по сигналам рукоятчика или по меткам на канате и барабане машины. После остановки машины необходимо, вращая шкалу точного отсчета, совместить метки, соответствующие положению подъемного сосуда, и произвести контрольный перегон порожних подъемных сосудов.