

Система автоматического регулирования скорости арсгтсс
Система АРС ГТСС разработана коллективом «Гипротранссиг-налсвязь». В идеологию построения системы АРС ГТСС положены два основных принципа управления скоростью скатывания отцепов:
самонастройка режимов управления ТП и автоматическая корректировка программ за счет статистической обработки (накопления опыта) данных о фактических скоростях движения отцепов по замедлителям (отдельно по каждой средней весовой категории);
использование в расчетах режимов управления замедлителя ми весового эквивалента удельного ходового сопротивления и вы явление тенденции отклонения принятого значения от истинного.
Структурная схема системы АРС ГТСС представлена на рис. 4.26. Система включает в себя следующие устройства и оборудование:
ДИС
— допплеровский измеритель скорости;
УО — устройство определения
точки отрыва; СР — устройство расчета
скорости роспуска;
ВК — блок вычисления весовой категории
и длины отцепа;
М — манипулятор; ПИ — преобразователь
информации; УП — устройство
памяти; ЭПМ — электроуправляемая пишущая
машинка;
РПУ — устройство расчета переменного
упреждения; СУ —

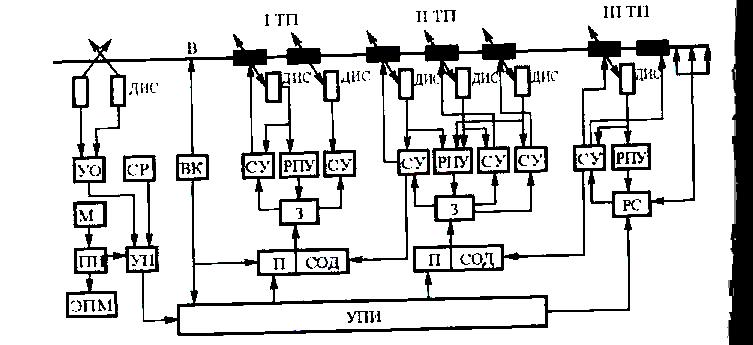 Рис.
4.26. Схема АРС ГТСС
Рис.
4.26. Схема АРС ГТСС
следящее и управляющее устройство; 3 — блок задания; П — ус
устройство выбора программы; СОД — устройство статистической обработки данных; PC — устройство расчета скоростей выхода отцепа в парк; УПИ — устройство передачи информации; Д — датчик контроля свободности пути.
Здесь каждая ТП имеет свой комплект управляющей аппаратуры, основу которой составляют блоки СУ и РПУ. Информацию о скорости движения отцепов СУ получает от ДИС. Величина заданной скорости движения V3 по замедлителям поступает в СУ от устройств 3 в зависимости от информации, полученной при подходе отцепа к ТП из УПИ. Блок СУ непрерывно следит за несоответствием междуVф и V3 и выдает необходимые команды на замедлители.
В случае совпадения на IТП Vф и V3 отцепы свободно движутся в соответствии с маршрутами к IIТП. При подходе к средней ТП проверяется соответствие входной скорости отцепов V3 , а результат запоминается в блоке СОД, где на основании сопоставления подобных данных для группы отцепов определенной весовой категории принимается решение о необходимости сохранить или изменить режим работы 1ТП. При этом производится корректировка заданной выходной скорости из замедлителей 1ТП. Таким образом, выявляется тенденция (по разным причинам) отклонения принятого среднего значения весового эквивалента ходового сопротивления для конкретных весовых категорий отцепов от фактических параметров, т.е. имеет место накопление опыта работы системы в данных условиях.
Информация о соответствии скоростей подхода отцепов к ШТП заданной величине используется аналогично, и корректировка весового эквивалента ходового сопротивления теперь производится при расчете Vвых.3 . Расчетная величина Vвых.3 поступает в СУ из PC в зависимости от удельного ходового сопротивления (весового эквивалента), свободности подгорочного пути, длины отцепа, уклона пути и расчетного значения скорости соударения. Данные о свободной длине пути выдают устройства КЗП. выполненные с применением индуктивных датчиков. Динамический контроль заполнения учитывает длину пробега отцепов во время их движения до полной остановки.