

8.3.2.2. Расчет фильтра верхних частот производим по следующей методике
Схема фильтра приведена на рис. 8.15
Рисунок 8.15
Каждая из RC цепей вносит наклон по 6 дБ на октаву. Характеристика вблизи края полосы пропускания формируется за счет обратной связи через сопротивления R1.
При расчете параметров фильтра, как и для фильтра нижних частот, с помощью таблицы 8.1 находится величина ƒср=ƒздб/d, полагая, что С=С1=С2 и R=R1=R2, выбираем величину С из соотношения
ƒср=1/(2πRC).
Из таблицы 8.1 находим величину α
соответствующую выбранному типу фильтра,
задаем величину RA
и находим RВ по
формуле RВ=(2-α) RA.
По формуле КП=![]() +1
найдем коэффициент усиления в полосе
пропускания.
+1
найдем коэффициент усиления в полосе
пропускания.
Оба фильтра (верхних и нижних частот) Саллена и Кея настраивают следующим образом:
Величина ƒср устанавливается совместным изменением С1 и С2.
Величина α устанавливается изменением RВ.
8.3.2.3. Исследование комбинированной схемы подавления помех
В зависимости от варианта задания собираем схему нижних или верхних частот и подключаем ее к выходу схемы рис. 8.12. Включите питание макета.
Для новой схемы выполните пункт 9 без выключения питания. Включите оба сигнала Uвх, Ucф. Наблюдайте сигнал на выходе схемы рис. 8.13 и выходе схемы фильтра. Сделайте зарисовку осциллограмм и сравните полученные результаты.
В отчете содержатся:
Исследуемые схемы.
Расчетные соотношения и результаты расчетов.
Результаты экспериментальных исследований в виде диаграмм и графиков.
Выводы по работе исследуемых схем и их характеристикам.
8.4 Контрольные вопросы.
Вывод основных расчетных соотношений для исследуемых схем.
Как влияет нестабильность параметров на точность работы рассмотренных схем?
Каким образом можно подавить помеху в узкой полосе частот?
Как и какими схемами можно подавить помеху, если амплитуда полезного сигнала больше амплитуды сигнала помехи?
Как выбирать параметры фильтров при известных спектрах сигнала и шума?
Библиографический список
Медицинская электронная аппаратура для здравоохранения. Пер. с англ./Л.Кромвелл, М.Ардитти, Фвейбелл и др.; Пер. под ред. Р.И.Утямышева. – М.: Радио и связь, 1981.-344с.
Анисимов Б.В., Голубкин В.Н., Петраков С.В. Аналоговые и гибридные ЭВМ: Учебник для студ. ВУЗов. – М.: Высшая школа, 1986. – 288с.
Алексаков Г.В. и др. Персональный аналоговый компьютер/ Г.Н.Алексаков, В.В.Гаврилин, В.А.Федоров. – М.: Электроатомиздат, 1992. – 256с.
Аналоговые элементы и устройства автоматики и вычислительной техники: Учебное пособие/ Под ред. Ю.И.Лыпаря. – Л.: ЛПИ, 1987.- 92с.
Ахутин В.М., Першин Н.Н., Тимофеев В.И. Проектирование электродов для регистрации биопотенциалов: Учебное пособие. – Л.: ЛЭТИ, 1983. – 48с.
Теория и проектирование диагностической электронно-медицинской аппаратуры: Учебное пособие/ В.М. Ахутин, О.Б. Лурье, А.В. Немирко, Е.П. Попечителев – Л.: Изд-во Ленинградского ун-та, 1980. – 165с.
Гутников В.С.: Энергоатомиздат, Ленинградское отделение, 1988. – 84с.
Менджицкий Е. Операционные усилители постоянного тока./ Под ред. А.В.Шелейко. – М.: Энергия, 1967. – 56с.
Гребен А.Б. Проектирование аналоговых интегральных схем. Пер. с англ. – М.: Энергия, 1976. – 74с.
Чигирев Б.И. Построение устройств математической обработки биологических сигналов: Учебное пособие: - Л.: ЛЭТИ, 1987. – 64с.
Практическая работа №8
Корректор нелинейности датчика
Теоретические сведения.
В автоматических системах управления и измерительной технике используются корректирующие звенья различного назначения, в частности, для корректировки нелинейности датчиков. В качестве примера рассмотрим устройство линеаризации характеристики датчика, используемого для измерения влажности зерна и реализующего наиболее надежный и простой способ измерения сопротивления на постоянном токе. Нелинейность такого датчика проявляется в области малых значений влажности, где зависимость сопротивления от содержания влаги носит логарифмический характер. Это позволяет представить эквивалентную схему датчика в виде последовательно включенных резистора Rd и диода Dd (рис.23). Корректирующее звено выполнено на операционном усилителе OU, в цепь отрицательной обратной связи которого включен резистор Rk последовательно с диодом Dk. Для наблюдения эффекта линеаризации введен переключатель А, который нажатием клавиши А клавиатуры замыкает диод Dk.
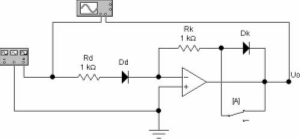
Рис.23. Эквивалентная схема корректора нелинейности датчика.
Для получения передаточной характеристики рассматриваемого устройства используется функциональный генератор в режиме пилообразного сигнала и осциллограф в режиме развертки В/А, при котором выходной сигнал Uo, поступающий на вход канала B, разворачивается сигналом с функционального генератора, поступающим на вход канала А. Результаты моделирования при выключенном корректирующем диоде (в положении переключателя А, показанном на рис.23) приведены на рис.24, из которого видны искажения, вызванные нелинейностью датчика в области небольшой влажности, т.е. при низких уровнях сигнала на выходе датчика (при анализе осциллограмм и коэффициента передачи не забывайте, что используется инвертирующий усилитель).
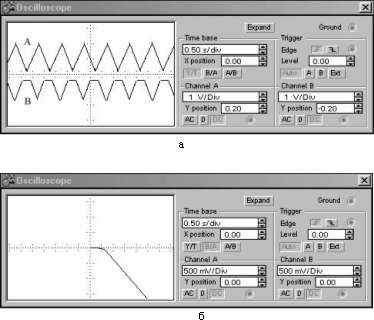
Рис.24. Осциллограммы входных (А) и выходных (В) сигналов (а) и передаточная характеристика датчика (б) в схеме на рис.23 при выключенной коррекции
Результаты моделирования при переводе выключателя в положение, соответствующее включению коррекции, показаны на рис.25, откуда видно, что исчезли искажения выходного сигнала, а передаточная характеристика не имеет характерного излома, вызванного нелинейностью датчика. Для более сложной коррекции могут быть использованы универсальные функциональные преобразователи, рассмотренные в [1].
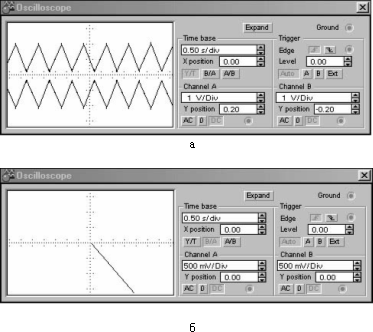
Рис. 25. Осциллограммы сигналов (а) и передаточная характеристика датчика (б) в схеме на рис. 23 при включенной коррекции
Порядок выполнения работы.
Проведите моделирование схемы на рис.23 при различных типах диодов Dd и Dk. При моделировании необходимо учесть, что диоды работают в прямо смещенном режиме и их вольтамперная характеристика в таком включении описывается выражением: I=I0[exp(U/
 )-1]
или U=ln(I/I0+1),
где I0
- обратный (тепловой) ток;
-
температурный потенциал p-n-перехода,
при температуре 20ºC он равен 26 мВ. Каким
параметром диода в приведенной формуле
необходимо варьировать, чтобы при
моделировании добиться положительных
результатов?
)-1]
или U=ln(I/I0+1),
где I0
- обратный (тепловой) ток;
-
температурный потенциал p-n-перехода,
при температуре 20ºC он равен 26 мВ. Каким
параметром диода в приведенной формуле
необходимо варьировать, чтобы при
моделировании добиться положительных
результатов?
Проведите моделирование схемы на рис.23 при сопротивлении датчика 100 Ом (учтите рекомендации п.1).
Контрольные вопросы и задания.
С какой целью осуществляется линеаризация характеристик датчиков?
Из анализа данных на рис.24 определите, при каких параметрах сигнала генератора получены приведенные на этих рисунках данные, если учесть, что нелинейность датчика проявляется в наибольшей степени при низких уровнях сигнала.
Почему передаточные характеристики датчика изображены на экране осциллографа не в первом, а в четвертом квадранте?