

2.4.3 Вращающееся магнитное поле. Принцип работы асинхронного двигателя
Одним из главных достоинств трехфазных цепей является возможность получения вращающихся магнитных полей, лежащих в основе работы наиболее распространенных типов асинхронных двигателей. Принцип получения вращающегося магнитного поля можно проиллюстрировать на примере двух взаимно перпендикулярных катушек индуктивностей. На рисунке 2.20 показан в разрезе один виток каждой катушки, питаемой синусоидальными токами i1 и i2. Под действием этих токов создаются магнитные поля с индукцией в точке пересечения катушек (ток течет от конца, помеченного знаком «х» к концу «.»): B1 = Bmsinwt и B2 = Bmcoswt. Результирующий вектор магнитной индукции
![]() ,
(2.50)
,
(2.50)
т. е. получено результирующее магнитное поле, вращающееся по часовой стрелке с угловой частотой w. Аналогичным образом может быть образовано вращающееся магнитное поле в трехфазной системе с токами, создающими мгновенные значения индукции:
![]() .
(2.51)
.
(2.51)
Рисунок 2.20 – Магнитное поле двух взаимно перпендикулярных
катушек индуктивности
Введем в рассмотрение
фазовый оператор a
= ej2p/3.
Тогда результирующий вектор индукции
![]() определится
как:
определится
как:
 (2.52)
(2.52)
Таким образом, получено результирующее магнитное поле с амплитудой магнитной индукции 1,5Вm, вращающееся с угловой частотой w по часовой стрелке.
На использовании вращающегося магнитного поля основан принцип действия трехфазного асинхронного двигателя. Вращающееся магнитное поле в асинхронном двигателе создается обмотками статора. Это поле наводит в обмотках ротора индукционные токи. Взаимодействие этих токов с вращающимся магнитным полем приводит к возникновению вращающегося момента в направлении поворота поля. В результате ротор начинает вращаться со скоростью u (об/мин), несколько меньшей скорости вращения магнитного поля un (отсюда термин «асинхронный»). Для характеристики степени различия указанных скоростей вращения вводят параметр
![]() ,
(2.53)
,
(2.53)
называемый скольжением. Для получения вращающего момента величина скольжения должна быть больше нуля (обычно s0 = 0,02...0,04).
2.4.4 Синхронный генератор
Ротор синхронных машин вращается синхронно с вращающимся магнитным полем. Поскольку частоты вращения ротора и магнитного поля одинаковы, в обмотке ротора не индуцируются токи. Поэтому обмотка ротора получает питание от источника постоянного тока. Устройство статора синхронной машины практически не отличается от устройства статора асинхронной машины.
Питание к обмотке ротора подводится через скользящие контакты, состоящие из медных колец и графитовых щеток. При вращении ротора его магнитное поле пересекает витки обмотки статора, индуцируя в них ЭДС. Чтобы получить синусоидальную форму ЭДС, зазор между поверхностью ротора и статором увеличивают от середины полюсного наконечника к его краям (рисунок 2.21).
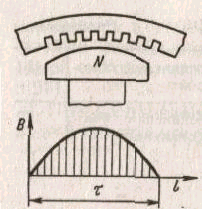
Рисунок 2.21 – Синхронный генератор