

2.5. Транспонирование матрицы.
Функция ТРАНСП раздела "Ссылки и массивы"
Формат: ТРАНСП (массив),
массив := блок ячеек|массив констант|имя диапазона.
Назначение. Определение транспортированной матрицы. Применяется для того, чтобы изменить ориентацию массива с вертикальной на горизонтальную и наоборот.
Если исходный массив вертикальный, то результирующий массив будет горизонтальный, и наоборот. Первая строка горизонтального массива аргумента становится первым столбцом вертикального массива и т.д. Функция ТРАНСП должна быть введена как формула массива в диапазоне, который имеет такое же число строк и столбцов, сколько столбцов и строк имеет массив, заданный в качестве аргумента.
Пример.
Имеется следующая информация:
|
A |
B |
С |
D |
1 |
12 |
26 |
38 |
31 |
2 |
13 |
72 |
62 |
52 |
3 |
17 |
10 |
49 |
10 |
4 |
24 |
8 |
58 |
5 |
Найти транспонированную матрицу.
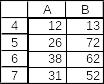
Выделяем диапазон для результата А6:D7, выполняем fx → Математические → ТРАНСП и вводим аргумент – исходную матрицу A1:B4
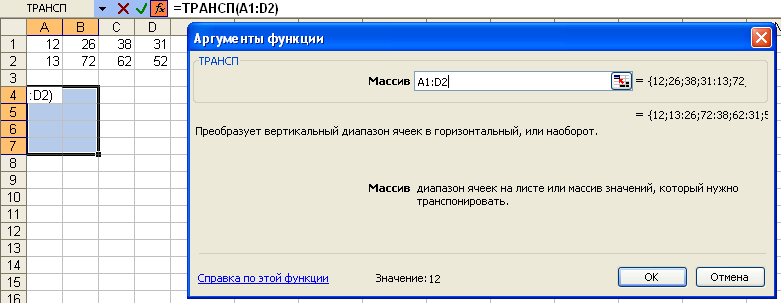
нажимаем Ctrl + + . Результат:
3. Решение системы линейных уравнений методом обратной матрицы
Пусть имеется система линейных уравнений:
![]()
Ее
запись в матричном виде:
![]() ,
где
,
где
 ,
,
 и
и
Решение
системы уравнений находят путем
вычисления обратной матрицы
![]() (функция
МОБР) и последующего умножения ее на
вектор свободных членов
(функция
МОБР) и последующего умножения ее на
вектор свободных членов
![]() (функция МУМНОЖ).
(функция МУМНОЖ).
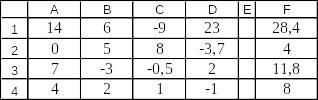
Пример. Решить систему линейных уравнений:

Ввести матрицы A и B:
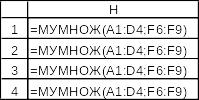
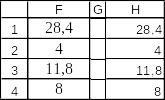
Найти обратную матрицу и умножить ее на вектор свободных членов B. Результат – столбец X:


Проверка достоверности результата – умножить исходную матрицу A на столбец решений X и получить правые части B.
4. Решение систем линейных уравнений методом Крамера.
Пусть имеется система линейных уравнений:
Определяют
определитель главной (![]() )
и дополнительных (
)
и дополнительных (![]() )
матриц, а затем вычисляют значения
неизвестных по формуле
)
матриц, а затем вычисляют значения
неизвестных по формуле
![]() ,
где
,
где
![]()
![]()
Пример. Решить систему линейных уравнений методом Крамера.
![]()
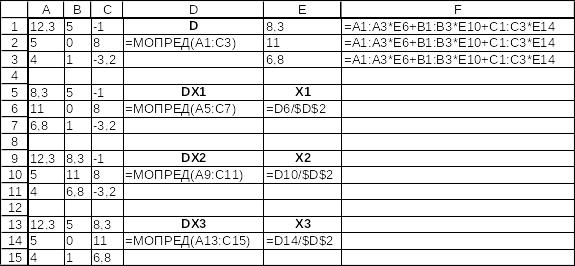
Скопировать исходную матрицу 3 раза (так как 3 неизвестных). Найти определители, вычислить значения аргументов (X1=DX1/D; X2=DX2/D; X3=DX3/D). Результат:
12,3 |
5 |
-1 |
D |
8,3 |
8,3 |
5 |
0 |
8 |
136,600 |
11 |
11 |
4 |
1 |
-3,2 |
|
6,8 |
6,8 |
|
|
|
|
|
|
8,3 |
5 |
-1 |
DX1 |
X1 |
|
11 |
0 |
8 |
370,600 |
2,713 |
|
6,8 |
1 |
-3,2 |
|
|
|
|
|
|
|
|
|
12,3 |
8,3 |
-1 |
DX2 |
X2 |
|
5 |
11 |
8 |
-693,680 |
-5,078 |
|
4 |
6,8 |
-3,2 |
|
|
|
|
|
|
|
|
|
12,3 |
5 |
8,3 |
DX3 |
X3 |
|
5 |
0 |
11 |
-43,800 |
-0,321 |
|
4 |
1 |
6,8 |
|
|
|
Проверить достоверность результата (подставить в систему найденные значения или решить методом обратной матрицы)
Контрольные вопросы
.