

Цилькер Б.Я., Орлов С.А. Организация ЭВМ и систем
.pdf
162 Глава 4. Организация шин
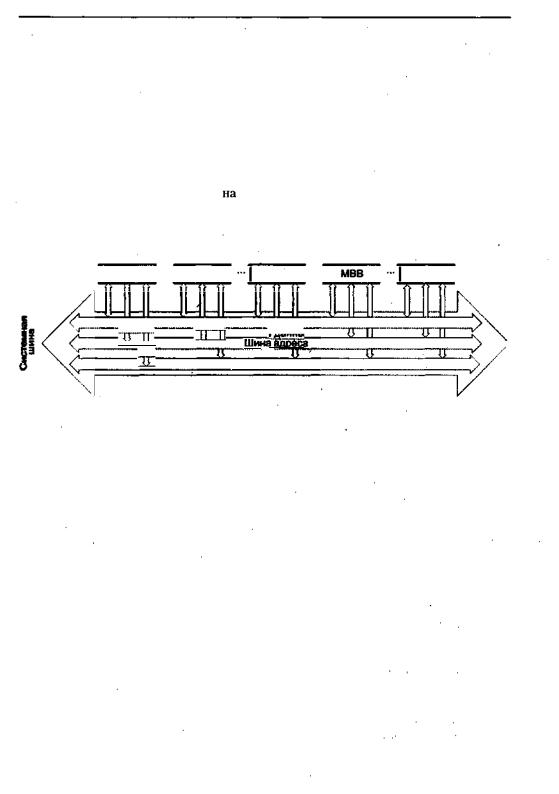
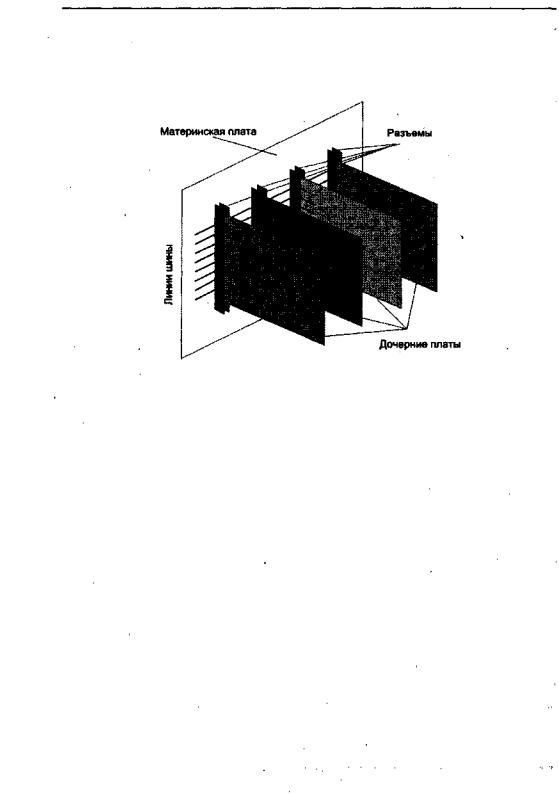
ринской плате реализуется либо в виде медного слоя (одного из внутренних слоев многослойной печатной платы), либо как широкая медная дорожка на обратной стороне материнской платы.
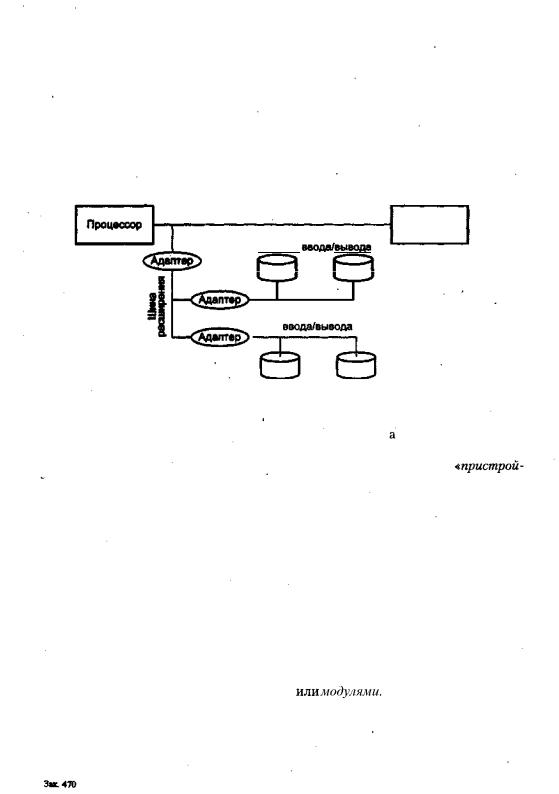
Рис. 4.8. Организация объединительной шины
Контактные пружины в разъемах обеспечивают независимое подключение сиг нальных линий, расположенных по обеим сторонам вставляемой в разъем дочер ней платы. При создании соединительных разъемов прилагаются значительные усилия с тем, чтобы гарантировать надежный контакт после многократного извле чения платы из разъема, а также при длительной (многолетней) эксплуатации разъема в загрязненной или коррозийной среде.
«Механические» спецификации шины обычно включают такие детали, как раз меры плат, размеры и размещение направляющих для установки платы, разрешен ное место для установки кабельного разъема, максимальная высота элементов на плате и т. д.
Электрические аспекты
Все устройства, использующие шину, электрически подсоединены к ее сигналь ным линиям, представляющим собой электрические проводники. Меняя уровни напряжения на сигнальных линиях, ведущее устройство формирует на них инфор мационные или управляющие сигналы. Когда ведущее устройство выставляет на сигнальной шине какой-то уровень напряжения, этот уровень может быть воспри¬ нят приемниками в любой точке линии. Такое описание дает лишь идеализиро ванную картину происходящих на шине процессов — реальные процессы значи тельно, сложнее.
Схему, меняющую напряжение на сигнальной шине, обычно называют драйве ром или возбудителем щины. В принципе драйвером может быть любая цифровая схема, поскольку на ее цифровом выходе всегда присутствует один из двух воз можных уровней напряжения.
Физическая реализация шин |
163 |
При реализации шины необходимо предусмотреть возможность отключения драйвера от сигнальной линии на период, когда он не использует шину. Один из возможных способов обеспечения подобного режима - применение драйвера, вы ход которого может находиться в одном из трех состояний: «высокий уровень на пряжения» (high), «низкий уровень напряжения» (low) и «отключен» (off). Для перевода в состояние «off», эквивалентное отключению выхода драйвера от сиг нальной линии, используется специальный вход драйвера. Режим «off» необхо дим для исключения возможности одновременного управления шиной двумя или более устройствами, в противном случае на линиях могут возникать пиковые вы бросы напряжения или искаженные сигналы, которые кроме некорректной пере дачи информации могут привести к преждевременному отказу электронных ком понентов.
Совместное использование линии шины несколькими устройствами возможно также за счет подключения этой линии к выходу драйвера через резистор, соединен ный с источником питания. В зависимости от полупроводниковой технологии, примененной в выходных каскадах драйвера, подобную возможность обеспечивают схемы с открытым коллектором (ТТЛ), открытым стоком (МОП) или открытым эмиттером (ЭСЛ). Данный способ не только исключает электрические конфлик ты на шине, но и позволяет реализовать очень полезный вид логической операции, известный как «монтажное ИЛИ» или «монтажное И» (трактовка зависит от со ответствия между уровнями напряжения и логическими значениями 1 и 0). Если к линии одновременно подключается несколько драйверов, то сигнал на линии представляет собой результат логического сложения (операция ИЛИ) всех посту- ' пивших на линию сигналов. Это оказывается весьма полезным при решении зада чи арбитража, которая рассматривается позже. В некоторых шинах «монтажное ИЛИ» используется лишь в отдельных сигнальных линиях, но иногда эту опера цию допускают по отношению ко всем линиям шины.
Приемниками в операциях на шинах называют схемы, сравнивающие уровень сигнала на входе со стандартными значениями, формируемыми внутренними це пями приемников. По итогам сравнения приемник генерирует выходной сигнал, уровень которого соответствует одному из двух возможных логических значений — 1 или 0. Трансивер (приемопередатчик) содержит приемник и драйвер, причем выход драйвера и вход приемника сводятся в общую точку.
Рассматривая процесс распространения сигнала по сигнальной линии, необхо димо учитывать четыре основных фактора:
•скорость распространения;
•отражение;
•перекос;
•эффекты перекрестного влияния.
Теоретическая граница скорости распространения сигнала — скорость света в свободном пространстве, то есть около 300 мм/нс. Реальная скорость, определя емая физическими характеристиками сигнальных линий и нагрузкой, реально не может превысить 70% от скорости света.
Процессы в линии рассмотрим на примере сигнальной линии, которая через резистор, соединенный с источником питания, удерживается на уровне напряже-
164 Глава 4. Организация шин
ния, соответствующем логической единице. Сигнал драйвера «подтягивает» ли нию к своему уровню напряжения. Изменение напряжения распространяется от точки подключения драйвера в обоих направлениях, пока на всей линии не уста новится уровень сигнала драйвера. Характер распространения сигнала определя ют емкость, индуктивность и характеристическое сопротивление линии, локаль ные значения которых по длине линии зависят от локальных свойств проводника и его окружения.
По мере распространения по реальной линии сигнал преодолевает области с раз личным сопротивлением. Там, где оно меняется, сигнал не может оставаться по стоянным, поскольку меняется соотношение между током и напряжением. Часть сигнала продолжает продвижение, а часть — отражается в противоположную сто рону. Прямой и отраженный сигналы могут повторно отражаться, в результате чего на линии формируется сложный результирующий сигнал. В конце линии сигнал отражается назад, если только он не поглощен правильно подобранным согласую щим резистором. Если на конце линии имеется согласующий резистор, с сопро тивлением, идентичным импедансу линии, сигнал будет поглощен без отражения. Такие резисторы должны размещаться по обоим концам сигнальной линии. К со жалению, точное значение импеданса реальной линии никогда не известно, из-за чего номиналы резисторов невозможно точно согласовать с линией, и отражение всегда имеет место.
При параллельной передаче по линиям шины битов адреса или данных сигна лы на разных линиях достигают соответствующих приемников совсем не одновре менно. Это явление известно как перекос сигналов. Причины возникновения и спо собы компенсации перекоса будут рассмотрены позже.
Распространяясь по линии, сигнал создает вокруг нее электростатическое и ма гнитное поля. Сигнальные линии в шине располагаются параллельно и в непо средственной близости одна от другой. Поля от близко расположенных линий пе рекрываются, приводя к тому, что сигнал на одной линии влияет на сигнал в другой. Этот эффект называют перекрестной или переходной помехой.
Наиболее очевидный способ уменьшения перекрестной помехи эффекта - про странственно разнести линии шины так, чтобы их поля не влияли на «соседей» — для печатной платы ограниченного размера не подходит. К снижению эффектов перекрестного влияния ведет уменьшение взаимных емкости и индуктивности линий, чего можно добиться, разместив вблизи сигнальных линий «земляные» линии или включив в многослойную печатную плату «земляные» слои. Это, одна ко, приводит к нежелательному эффекту увеличения собственной емкости линий. Наиболее распространенный подход к снижению перекрестной помехи состоит в разделении линий изолятором с малой диэлектрической постоянной. В целом, при проектировании шин обычно используется комбинация перечисленных мето дов борьбы с перекрестной помехой.
Из-за несовершенства физической реализации сигнальных линий фронты им пульсов по мере распространения сигналов меняются, соответственно, меняется и форма сигнала. Для каждой шины существует некое минимальное значение ши рины импульса, при которой он еще способен дойти от одного конца к другому так, что его еще можно распознать. Эта ширина выступает в качестве основного
Физическая реализация шин 165
ограничения на полосу пропускания данной шины, то есть на число импульсов, которые могут быть переданы по шине в единицу времени.
Поскольку драйвер одновременно «видит» две линии, передающие информа цию в противоположных направлениях, он должен поддерживать двойную по срав нению с одной линией величину тока. Для типичных линий импеданс не превы шает 20 Ом, а сигналы имеют уровень порядка 3 В, что выражается в величине тока около 150 мА. Приведенные цифры для современных драйверов не составля ют проблемы, поскольку применяемые в настоящее время схемы способны при способиться к гораздо худшим параметрам сигналов.
Порождаемый сигналом ток замыкается через «земляной» контакт драйвера. Когда одновременно активны все сигнальные линии, ток возврата через «землю» может быть весьма большим. Положение осложняет то, что ток этот не является постоянным и в моменты подключения и отключения драйвера содержит высоко частотные составляющие. Кроме того, из-за сопротивления и индуктивности «зем: ляного» слоя печатной платы потенциалы на «земляных» выводах дочерних плат могут различаться. Это может приводить к неверной оценке сигналов приемника ми, следствием чего становится некорректное срабатывание логических схем. С «зе мляным» шумом легче бороться на стадии проектирования шины. Прежде всего необходимо улучшать характеристики «земляных» слоев на материнской и дочер них платах. Между системами заземления материнской и дочерних плат должно быть много хорошо распределенных надежных контактов. Для высокоскоростных шин на каждые четыре сигнальных шины следует иметь отдельный «земляной» контакт. Кроме того, дочерняя плата должна быть спроектирована так, чтобы «зем ляной» ток от данного драйвера протекал к тому «земляному» контакту, который расположен как можно ближе к сигнальным выводам. «Земля» материнской пла ты обычно реализуется в виде внутреннего медного слоя в многослойной печат ной плате; отверстия с зазором вокруг сигнальных выводов предотвращают корот кое замыкание сигнального вывода с этим слоем. Разъем должен быть достаточно широким, чтобы на дочерней плате трансиверы можно было разместить по воз можности ближе к нему, что позволяет сократить длину тех участков шины, где нарушается ее неразрывность.
В целом ряде известных шин многие из рассмотренных положений игнорируются. По практическим соображениям используются линии с высоким импедансом. На дежность работы с такими «плохими» шинами достигается за счет их замедления: затягивание перехода сигналов от одного уровня напряжения к другому приводит к уменьшению отражений. Снижается также влияние перекрестных помех.
Высокое быстродействие драйверов шины имеет и отрицательную сторону: они оказываются слишком быстрыми для управляемых ими шин, при этом сигналы на линиях сильно искажаются. Эта проблема обычно преодолевается за счет введе ния задержки, часто называемой временем установления сигнала (временем успо коения). Задержка выбирается так, что сигналы стабилизируются до момента их использования. Зачастую достаточно задержки, принципиально присущей исполь зуемым схемам, но иногда приходится вводить и явную задержку.
В синхронных шинах, где для синхронизации транзакций используется единая система тактовых импульсов (ТИ), такая задержка может быть добавлена весьма